引言
在很多控制系统中,角度值是一个十分重要的物理参数。例如起重机和升降机上都要有角度测控机构来控制起降高度;飞行器自动驾驶系统中都有大量的角度传感器,实时检测飞机偏转角度,以便对飞行姿态进行调整。目前已有利用加速度传感器实现高精度角度测量的设计研究,但主要侧重于单轴的测量,同时进行三轴测量的研究设计鲜有报道。本文将重点讨论采用三轴加速度传感器MMA7361L实现高精度角度检测的软硬件方法。
1 角度检测仪硬件平台设计
采用了高精度三轴加速度传感器MMA7361L作为角度检测模块,数据处理采用最新的带A/D转换功能的STM32F103VE芯片,采用I2C接口的AT24C02A芯片进行周期性数据存储,采用1602液晶模块对角度值进行实时显示,为了扩展系统功能,采用4×4键盘对系统模式进行设置。同时采用声光报警电路,当角度超过设定上限时,进行声光报警提示。角度检测仪硬件平台结构框图如图1所示。

1.1 STM32F103VE控制器
本系统采用新一代低功耗高速工业级芯片STM32F103VE作为控制器核心,芯片采用更优化的32位ARM Cortex-M3内核,时钟频率达到72 MHz。该芯片系统资源和外围接口丰富,内部集成专用时钟、复位以及电源管理模块,支持多种工作模式,内含2个12位高速ADC、80个快速I/O口、7个定时器和多达9个通信接口。
1.2 MMA7361L角度检测模块设计
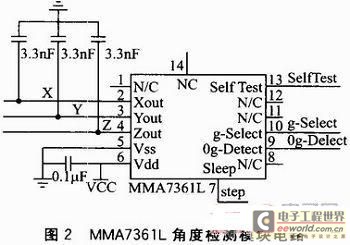
MMA7361L是一种超低功耗、小型电容式的微机械加速度传感器。该传感器可以采用1.5g或6g灵敏度重力选择模式,具有信号调理、一阶低通滤波、温度补偿、自检、带有线性自由落体检测和零重力检测等功能。工作电压为2.2~3.6V,工作电流为400μA,设置为睡眠模式时工作电路仅为3μA。从灵敏度、功耗角度考虑,采用MMA7361L作为角度检测模块的核心芯片。MMA7361L角度检测模块电路如图2所示。
2 角度检测仪软件平台设计
2.1 软件平台整体结构
几乎所有的嵌入式产品中都需要嵌入式软件来提供灵活多样而且可为应用定制的功能。为了便于今后产品功能扩展,采用精简的μC/ OS-II操作系统作为软件平台的支撑。角度检测仪软件体系结构如图3所示。其中最底层为设备驱动程序层,主要是进行处理器初始化和驱动各外设电路模块;第2层为嵌入式μC/OS-II操作系统,主要是管理系统的软硬件资源,以及上层应用和操作底层驱动接口;第3层为应用程序,主要是系统调用和实现OS级别功能。

[page]
2.2 MMA7361L角度测试驱动实现
MMA7361L是一款高精度的模拟三轴加速度传感器,其精度模式可以选择1.5g或6g两种。从工程需要的角度选择1.5g模式,其精度为800 mV/g,将g-Select引脚置为低电平。在正常工作状态,Sleep引脚需要置为高电平。同时启动Self Test模式,芯片在工作之前先完成内部自检。
MMA7361L三轴加速度传感器实现角度测试,其核心算法是建立输出电压和角度之间的函数映射关系。零倾斜角度的选择对于测量仪的精度影响比较大,本文先以MMA7361L传感器X轴方向的倾角计算为例加以说明,Y轴、Z轴的角度测量方法类似。在本文中取传感方向x轴与重力加速度g垂直时的状态为零倾斜角度,当倾角为θ时,x轴方向倾角测量图示如图4所示。
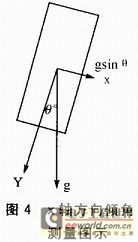
传感方向x轴方向的重力加速度分量是g1(θ)=gsinθ,当θ→0时有:

可以看到,当倾斜角θ为一个小角度时,其角度的变化率(即导数)越大并趋向于g,这样有助于提高小角度测量的分辨率,因此该零倾斜角度的选择方式有助于小角度的精确测量。由于传感器的加速度分量与其电压成正比,且精度是800mV/g,因此倾角 。
。
在算法分析的基础上,该加速度传感器的角度测试的驱动程序得以实现。其核心部分可以用如下代码实现:

Y轴、Z轴的角度也可以用类似的方法得到。另外为了便于系统管理,软件部分采用实时精简的嵌入式操作系统μC/OS-II,可以将角度测量、键盘、显示作为若干个任务进行管理。

结语
本文论述了一种基于MMA7361L的高精度智能角度测量仪的设计与实现方法,构建了角度测量仪的软硬件平台,同时对MMA7361L角度检测算法进行了详细的介绍,并给出了实现代码。实验测试证明,该测量仪具有高精度和良好的可靠性,且成本低,应用前景非常广阔。
引用地址:
MMA7361L的高精度角度检测平台设计
推荐阅读最新更新时间:2024-03-30 22:25
微加速度传感器实现无线鼠标(2)
鼠标在人的操纵下移动,微加速度传感器便会实时地输出鼠标运动的加速度大小和方向,ADXL203传感器的量程为±1.7gn ,电压灵敏度为1000mV/gn,这个电压信号经过差分放大5.0/1.7倍后,通过微控制器A/D转换功能变成与加速度大小对应的数字信号,加速度经过两次积分,便变成了鼠标移动的位移信号,然后,再经过编码,并通过nRF2401射频收发器将位移信号发射出去。 当加速度传感器输出电压为a时,经A/D转换得到的数字量大小为 式中 表示取整数;a为加速度传感器输出的电压大小,V。ATmega 16L单片机最大采样速率可以达到15000次/秒,本文采用1000次/秒;即每1ms采样一次,每25ms便
[模拟电子]

基于传感器的角度测量系统设计
在现代控制系统中,角度测量装置是非常关键的需要高精度的部件,其测量精度直接影响着整个系统的性能和精度。例如施工升降机上有角度测控机构来控制起降;火箭炮瞄准系统中都有大量的角度传感器,实时检测炮塔偏转角度,以便对火箭炮瞄准进行调整。目前已有的利用的加速度传感器实现高精度角度测量的研究,主要侧重于单轴的角度测量。本文将重点讨论利用双轴加速传感器ADXL202实现高精度角度测量的软硬件方法。 1 角度测量仪系统硬件方案设计 本角度测量仪采用STM32F107作为数据处理的核心芯片。这是一款低功耗、高速度的32位处理器,拥有Cortex-M3内核。角度测量模块使用的是高精度、低功耗的双轴加速度传感器ADXL202,能将加速度信号转换成数字方
[测试测量]
智能加速度传感器的设计
1 引言
对于传统的加速度传感器而言,由于只具有感知环境,输出模拟信号的功能,应用范围受到了很大限制,譬如,在车辆振动测试行车试验中,就需要配置电脑、数据采集卡等设备。不但设备昂贵,而且由于车辆需要在行驶过程中测试,所以就必须加长信号传输线,既带来了测量的不便,也导致由于外界环境的干扰测试误差的加大。现有的测振仪由于存在着大多价格昂贵,操作复杂,测量精度较低的缺陷,很大程度上限制了它的广泛应用。
本文设计了一种智能压阻式加速度传感器,有效地克服了对于传统加速度传感器的输出特性容易受噪声、温度、电源纹波、湿度等多种因素的干扰,避免了应用场合的局限性,实现了加速度的精确测量。
2 硬件组成
根据智能加速度传感器的使用要
[嵌入式]
用加速度传感器来进行手势识别器的设计
引言 手机、MP3播放器、硬盘播放器、数码相机、PDA等设备都是通过导航键对其进行控制的。目前比较流行的导航键控制方式有四维键、摇杆,这是最常见的两种导航键,此外还有一些手机上有很新颖的导航键设计,例如:LG-KG70的滚轴键、LG-KE608的转盘设计、索爱W830的触摸式、多普达D802的飞梭滚轮等等。这里,我们用加速度传感器设计一种看不见的导航键来代替四维键的功能,这种方案更能满足消费者的好奇心,满足消费者追逐时尚的需求。 手势识别的控制原理 本系统利用三轴加速度的值来判定对物体运动预定义的六种姿势。首先,分别对三个轴采样,每个轴各获得50个数据;然后,分别对每个轴上的数据进行处理来判定是否发生了
[传感器]
三轴加速度传感器在跌倒检测中的应用
前言 人们在跌倒后会面临双重危险。显而易见的是跌倒本身可能对人体产生伤害;另外,如果跌倒后不能得到及时的救助,可能会使结果更加恶化。例如,许多老年人由于其身体比较虚弱,自理能力和自我保护能力下降,常常会发生意外跌倒,如果得不到及时的救助,这种跌倒可能会导致非常严重的后果。有资料显示,很多严重的后果并不是由于跌倒直接造成的,而是由于跌倒后,未得到及时的处理和救护。当出现跌倒情况时,如果能够及时地通知到救助人员,将会大大地减轻由于跌倒而造成的危害。 不仅是对老人,在很多其他情况下,跌倒的报警也是非常有帮助的,尤其是从比较高的地方跌倒下来的时候。比如人们在登山,建筑,擦窗户,刷油漆和修理屋顶的时候。 这促使人们越来越热衷于对跌倒检测
[工业控制]
采用加速度传感器的角度测量仪系统硬件电路设计
在现代控制系统中,角度测量装置是非常关键的需要高精度的部件,其测量精度直接影响着整个系统的性能和精度。目前已有的利用的加速度传感器实现高精度角度测量的研究,主要侧重于单轴的角度测量。本文将重点讨论利用双轴加速传感器ADXL202实现高精度角度测量的硬件方法。 本角度测量仪采用STM32F107作为数据处理的核心芯片。这是一款低功耗、高速度的32位处理器,拥有Cortex-M3内核。角度测量模块使用的是高精度、低功耗的双轴加速度传感器ADXL202,能将加速度信号转换成数字方波信号输出,可直接与STM32F107连接,通过一定的算法即可计算出当前的倾斜角度。显示模块使用的是12864ZW型128×64的点阵液晶显示器。
[电源管理]





 。
。


 机器视觉技术及应用 (韩九强, 胡怀中)
机器视觉技术及应用 (韩九强, 胡怀中) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号