无极可调交流电子负载的设计与实现
2007-12-03 10:34:17 作者:王洪波 吴志伟等 来源:国外电子元器件关键字: PWM波 光耦 触发
1 引言
电阻是电路设计中最常用的电子元器件之一,具有多种型号、使用方便、价格便宜、操作简便等特点,在电路中具有重要作用,但也存在诸多缺点,譬如阻值不准确、功耗大、响应慢等,给电路设计带来了诸多不便。本文利用Atmel公司的高性价比AT-mega48单片机设计了一种新型电子阻抗,完全抛开了传统电阻采用电阻丝实现阻值,而是通过控制场效应管的通断时间等效改变阻值大小。这种新型的电子阻抗克服了传统电阻的缺点,具有阻值精确、响应快等优点。
2 ATmega48单片机简介
ATmega48单片机是Atmel公司推出的一款高性能单片机。由于该器件采用RISC精简指令集结构,其指令集大多为单周期指令,具有高速运行的特点。该单片机在1.8 V~5.5 V的电压范围内均能正常工作,抗干扰性强,片内自带4 K字节的Flash、256字节的E2PROM,以及512字节SRAM;内置6~8路10位A/D转换器、看门狗、3个16位的定时/计数器,具有独立振荡器的实时计数器RTC和6路PWM输出。
3 硬件电路设计
该系统板卡的主要功能模块包括双向光耦触发双向可控硅模块、绝对值电路模块、A/D采集模块、通信模块等。其基本工作原理:上位机发送占空比,通过RS-232通信使下位机产生相应的PWM波,控制光耦的通断时间,改变可控硅的导通时间,并在一个周期内等效为相应电流,从而实现电流的无极可调。
3.1 双向光耦触发双向可控硅模块
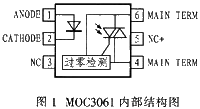
MOC3061系列光电双向可控硅驱动器是一种内置过零检测电路的新型光电耦合器件,可以采用直流低电压、小电流控制交流高电压、大电流。MOC3061输出端的额定电压是600 V。最大重复浪涌电流为1 A,最大电压上升率dv/dt为1 000 V/μs以上,一般高达2 000 V/μs,输入/输出隔离电压大于7 500 V,输入控制电流为15 mA。该器件触发晶闸管具有结构简单、成本低、触发可靠等特点。MOC3061的内部结构原理图如图1所示,它由输入、输出两部分组成。1、2引脚为其输入端,输入级是一个砷化镓红外发光二极管(LED),该二极管可在5 mA~15 mA正向电流作用下,发出足够的红外光。以触发输出部分。3、5引脚悬空,4、6引脚为输出端,输出级为具有过零检测功能的光控双向可控硅。当红外发光二极管发射红外光时,光控双向可控硅触发导通。双向可控硅采用BTA16。最大电流为16 A,耐压值为600 V。
MOC3061和双向可控硅组成交流通路,实现主回路的通断。由单片机的PWM波输出端口控制MOC3061的通断时间,实现主回路的通断控制。通过改变PWM波的占空比控制双向可控硅的通断时间,从而实现主回路电流的无极可调。
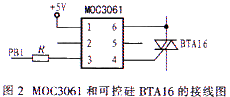
在单片机PB1引脚输出高电平时,过零通断型光电耦合器MOC3061初级得到约10 mA的正向工作电流,使内部硅化镓红外线发射二极管发射红外光,将过零检测器中光敏双向开关在市电过零时导通,接通主回路。在单片机PB1引脚输出低电平时,双向开关关断,主回路关闭。MOC3061和可控硅BTA16的接线如图2所示。
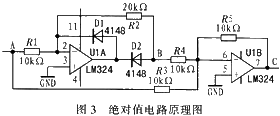
3.2 绝对值电路
绝对值电路也称为全波精密整流型电路,如图3所示。其工作原理如下:
当Ua为正电压时,D2导通、D1截止,B处的电压Ub=-2Ua,通过运算放大器U1B的反相求和得到输出电压Uc:
Uc=-(Ua+Ub)=-(-Ua-2Ua)=Ua
当Ua为负电压时,D1导通、D2截止,B处的电压Ub=0,通过放大器U1B的反相求和得到输出电压Uc:
Uc=-(Ua+Ub)=-Ua
综上所述可得:Uc=|Ua|,即输出端C电压是输入端A电压的绝对值。
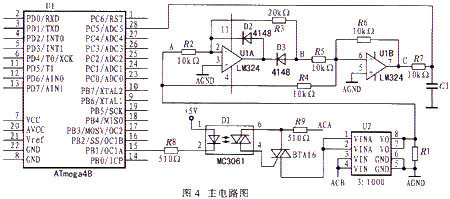
3.3 系统主电路
系统主电路如图4所示。上位机发出PWM控制信息,由单片机的PWM端口输出相应的PWM波,控制交流输入ACA和ACB的导通时间。交流电导通后经外部负载产生电流,电流器实现电流转换,经采样电阻R1后得到电压信号由绝对值电路输出到单片机的A/D端口,计算后再输出至上位机。其中,选取采样电阻R1要根据电流互感器的变比和单片机A/D的参考电压计算。本电路采用变化为3:1 000的电流互感器,A/D采用单片机内部的1.1 V基准电压。而负载电阻R9则是根据需要的电流及电源电压进行确定,R9确定后就可实现主回路电流在要求范围内无极可调。
3.4 通信模块
上位机与下位机的数据传输由通信模块实现,通信模块是由CAN总线和RS-232总线模块组成,其电路如图5所示。
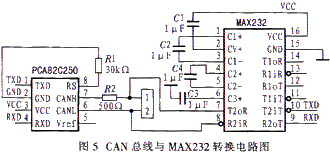
RS-232电平转换器MAX232可将±5 V电源电压转换成为RS-232输出电平所需的±10 V电压。CAN收发器选用PCA82C250。PCA82C250是CAN控制器与物理总线之间的接口器件,该器件可提供对CAN总线上的数据实现差动发送和接收的功能。
上位机PC可通过其串行接口发送数据,产生RS-232电平信号,电平转换电路可将该RS-232电平信号转换成单片机能接收的TTL/CMOS电平信号,并传到协议转换单元的单片机上,单片机将接收到的数据打包、转换后,再通过CAN收发器发送至CAN总线。挂接在CAN总线上的下位机节点收到数据后,根据控制命令做出相应操作。上位机与下位机通信示意图如图6所示。
4 软件设计
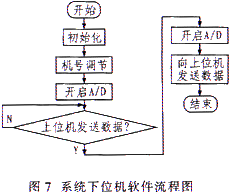
系统下位机的软件设计主要由A/D转换模块、接收数据模块、发送数据模块等几部分组成。系统下位机软件流程图7所示。上位机采用了LabviewCVI编写人机交互界面,实现各路PWM波的控制和实时电流显示功能。
5 结束语
PWM波控制场效应管的通断,精度高、动作灵敏、电路实现相对简单。ATmega48有6路PWM波,该板卡可同时实现6路电子负载。该板卡已经在实验中得到应用,效果明显、智能化高。
- 相关阅读
小广播
最热点击
专栏
 向农,EEWORLD副总编。被英特尔董事长贝瑞特称为“中国可与之对话的两名记者之一”
向农,EEWORLD副总编。被英特尔董事长贝瑞特称为“中国可与之对话的两名记者之一” - 总编随笔
 向农,EEWORLD副总编。被英特尔董事长贝瑞特称为“中国可与之对话的两名记者之一”
向农,EEWORLD副总编。被英特尔董事长贝瑞特称为“中国可与之对话的两名记者之一”  汤宏琳,人皆称为“汤汤”,电子工程世界高级编辑。随着EEWORLD一起成长。
汤宏琳,人皆称为“汤汤”,电子工程世界高级编辑。随着EEWORLD一起成长。 - 汤汤手记
 汤宏琳,人皆称为“汤汤”,电子工程世界高级编辑。随着EEWORLD一起成长。
汤宏琳,人皆称为“汤汤”,电子工程世界高级编辑。随着EEWORLD一起成长。  今年,是中国集成电路产业丰收的一年,相比较往年都有大幅提升。
今年,是中国集成电路产业丰收的一年,相比较往年都有大幅提升。 - 凯哥博客
 今年,是中国集成电路产业丰收的一年,相比较往年都有大幅提升。
今年,是中国集成电路产业丰收的一年,相比较往年都有大幅提升。  一枚小小的车钥匙能做什么?可以遥控开启车门和后备箱就已经令你满意了吗
一枚小小的车钥匙能做什么?可以遥控开启车门和后备箱就已经令你满意了吗 - 企业专栏
 一枚小小的车钥匙能做什么?可以遥控开启车门和后备箱就已经令你满意了吗
一枚小小的车钥匙能做什么?可以遥控开启车门和后备箱就已经令你满意了吗