HyperBootloader_PIC18_J 和 HyperBootloader_PIC18_None_J
完成PIC16 bootloader (详细情况请阅读我的上一篇随笔《自己用C语言写单片机PIC16 serial bootloader》) 后,接着就开始写PIC18的UART bootloader。事实上我写了HyperBootloader_PIC18_J 和 HyperBootloader_PIC18_None_J 两种bootloader。 一种给PIC18F, 另一种给PIC18FJ。两种bootloader除了在实现上有一点不同,大小也不同外,其他都差不多。都是模仿HI-TECH PICC bootloader实现的, 都是放置在程序存储器的头部,电脑端的程序都是用超级终端传送应用程序的Hex文件。在继续之前,先讲讲PIC18F和PIC18FJ的区别。
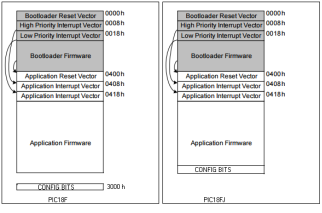
PIC18F和PIC18FJ的区别
PIC18F和PIC18FJ一个不同点是CONFIG BITS的烧写位置。对于PIC18F, CONFIG BITS被映射到程序存储器300000h (虚拟地址)开始的单元中。对于PIC18FJ,CONFIG BITS被烧写到程序存储器的底部(真实地址),每次上电自动会被映射到程序存储器300000h (虚拟地址)开始的单元中,所以对于PIC18FJ, 更新了CONFIG BITS,reset后才生效。
Interrupt Vector Remap
由于bootloader 位于程序存储器的头部,需要对Interrupt Vector进行remap. 代码如下。
#asm PSECT intcode goto APP_START + 0x8 PSECT intcodelo goto APP_START + 0x18 #endasm
HyperBootloader_PIC18_None_J 主要代码段
HyperBootloader_PIC18_None_J 每接收一行的超级终端发过来的Hex数据,一个一个程序字地烧录。具体实现的主要代码段如下。
for(;;) // loop until end of file { while (RCREG!=':'); // wait for start of hex file line
while(!TXSTAbits.TRMT);
TXREG=':'; // the prompt to download a new program
cksum = bcount = g2x(); // get the byte count#if _EEPROMSIZE > 256
EEADRH = TBLPTRH = g2x(); // get the address#else
TBLPTRH = g2x();#endif
TBLPTRL = EEADR = g2x();
DO_NOT_INCREMENT = 1;
rectype = g2x(); // get the record type
switch(rectype)
{ case DATA: // ldata record
#if (PROG_START > 0x200) || defined(__PIC18FX520)
// to protect bootloader from being overwritten
if( (FLASH) && (TBLPTRU==0) && (TBLPTRH < (unsigned char)(PROG_START>>8)) )
// to protect bootloader from being overwritten
break; // if bootloader is threatened, skip this
#endif
clear_buffer(); while(bcount--)
{
TABLAT = EEDATA = buff[(EEADR&(_FLASH_WRITE_SIZE-1))] = g2x(); // get the data
if((CONFIG)||(EEPROM))
{ if(CONFIG) // EEPROM/config. write byte at a time {
table_write();
} //zap(); } else
{ if((EEADR & (_FLASH_WRITE_SIZE-1)) == (_FLASH_WRITE_SIZE-1)) //program/IDLOCs flash bytes at a time {
flash8();
clear_buffer();
}
}
EEADR++;
} if(((EEADR&(_FLASH_WRITE_SIZE-1))!=0)&&(FLASH)&&(!CONFIG))
flash8();
checksum(); break; case END: // end of hex file checksum();
TXSTA = 0x02; //reset USART before jump to application
RCSTA = 0x00;
(*((void(*)(void))PROG_START))(); // jump to new program
break; case EXTEND_ADDRESS: // extended address record
while(bcount--)
{
EEADR=g2x(); // determines whether EE, Config or ID }
EEPGD=1; if(EEADR==0xF0)
EEPGD=0; // select for EEPROM
CFGS=0; if((EEADR&0xF0)==0x30)
CFGS=1; // select for config write
TBLPTRU=EEADR;
checksum(); break;
}
}HyperBootloader_PIC18_J 主要代码段
HyperBootloader_PIC18_J 每接收一行的超级终端发过来的Hex数据,在存到block数组中,block满了,再整个block地烧录。具体实现的主要代码段如下。
for (;;)
{ while (RCREG != ':'); while(!TXSTAbits.TRMT);
TXREG=':'; // the prompt to download a new program
cksum = bcount = g2x();
data_buffer[LEN_INDEX] = bcount;
data_buffer[ADDRH_INDEX] = g2x();
data_buffer[ADDRL_INDEX] = g2x();
rectype = g2x(); switch(rectype)
{ case DATA: while (bcount--)
{
data_buffer[LEN_INDEX + data_index + 1] = g2x();
data_index++;
}
checksum();
EECON1 = PGM_WRITE;
WriteMem(); break; case END:
checksum(); if (block_start)
{
WriteStart();
resetBlockBuffer();
block_start = 0;
}
TXSTA = 0x02; //reset USART before jump to application
RCSTA = 0x00;
asm("goto "___mkstr(APP_START)); break; case EXTEND_ADDRESS:
g2x();
data_buffer[ADDRU_INDEX] = g2x();
checksum(); break;
}
data_index = 0;
}如何使用
1. 使用XC8编译HyperBootloader_PIC18_J 或HyperBootloader_PIC18_None_J。
2. 使用pickit3烧录HyperBootloader_PIC18_J 或HyperBootloader_PIC18_None_J的Hex文件到目标板中。
3. 拔除pickit3烧录器,连接目标板与PC的串口,打开超级终端,设置如下:9600-8-None-1-None, Line Delay-20ms。
4. 重启目标板,超级终端会出现Booting... 字样。
5. 6秒内,在超级终端窗口中按下键盘上任何按键,会出现">"(6秒内没按键,会自动跳转到用户的应用程序中去)。
6. 打开Send Text File对话框,选择期望烧录的应用程序hex文件(由于bootloader在程序存储器的头部,所以应用程序需要在编译前设置XC8的Code offset, 如果是使用HyperBootloader_PIC18_J,设置为400, 如果是使用HyperBootloader_PIC18_None_J, 设置为300),点击确认, HyperBootloader会将接收到的数据传回到电脑超级终端上,并将数据烧录到目标板程序存储器的正确位置。
7. 烧录完毕,再次重启目标板,超级终端显示完Booting ......,就自动跳到应用程序中,目标板开始正常运行应用程序。
之后每次更新应用程序,只需重复步骤 4 ~ 7 就可以了。
主要特性
HyperBootloader_PIC18_J 和 HyperBootloader_PIC18_None_J 有以下主要特性
1. C语言写的,XC8 编译。
2. 非常容易移植。
3. 支持FLASH烧写
4. 可支持EEPROM烧写。
5. 支持CONFIG BITS/IDLOC 烧写。
上一篇:自己用C语言写单片机PIC16 serial bootloader
下一篇:自己用C语言写dsPIC / PIC24 serial bootloader
推荐阅读最新更新时间:2024-03-16 15:31

 单片机创新实践应用.
单片机创新实践应用. 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号