一、程序存储器(ROM)
地址范围:0000H~FFFFH,共64KB。其中:
低段4KB:0000H~0FFFH
80C51和87C51在片内,80C31在片外。
高段60KB:1000H~FFFFH。在片外。
读写ROM用MOVC指令,控制信号是PSEN和EA。
读ROM是以程序计数器PC作为16位地址指针,依次读相应地址ROM中的指令和数据,每读一个字节,PC+1→PC,这是CPU自动形成的。
但是有些指令有修改PC的功能,例如转移类指令和MOVC指令,CPU将按修改后PC的16位地址读ROM。
读外ROM的过程:
CPU从PC中取出当前ROM的16位地址,分别由P0口(低8位)和P2口(高8位)同时输出,ALE信号有效时由地址锁存器锁存低8位地址信号,地址锁存器输出的低8位地址信号和P2口输出的高8位地址信号同时加到外ROM 16位地址输入端,当PSEN信号有效时,外ROM将相应地址存储单元中的数据送至数据总线(P0口),CPU读入后存入指定单元。
二、外部数据存储器(外RAM)
地址范围:0000H~FFFFH 共64KB。
读外RAM的过程:
外RAM 16位地址分别由P0口(低8位)和P2口(高8位)同时输出,ALE信号有效时由地址锁存器锁存低8位地址信号,地址锁存器输出的低8位地址信号和P2口输出的高8位地址信号同时加到外RAM 16位地址输入端,当RD信号有效时,外RAM将相应地址存储单元中的数据送至数据总线(P0口),CPU读入后存入指定单元。
三、单片机内部数据存储器原理(内RAM)
从广义上讲,8051内RAM(128B)和特殊功能寄存器(128B)均属于片内RAM空间,读写指令均用MOV指令。但为加以区别,内RAM通常指00H~7FH的低128B空间。
8051内RAM又可分成三个物理空间:工作寄存器区、位寻址区和数据缓冲区。
作用:
有专用于工作寄存器操作的指令,读写速度比一般内RAM要快,指令字节比一般直接寻址指令要短,还具有间址功能,能给编程和应用带来方便。
工作寄存器区分为4个区:0区、1区、2区、3区。每区有8个寄存器:R0~R7,寄存器名称相同。但是,当前工作的寄存器区只能有一个,由PSW中的D4、D3位决定。
⒉ 位寻址区
⑴地址:
从20H~2FH共16字节(Byte,缩写为英文大写字母B)。每B有8位(bit,缩写为小写b),共128位,每一位均有一个位地址,可位寻址、位操作。即按位地址对该位进行置1、清0、求反或判转。
⑵用途:
存放各种标志位信息和位数据。
⑶注意事项:
位地址与字节地址编址相同,容易混淆。
区分方法:位操作指令中的地址是位地址;
字节操作指令中的地址是字节地址。
位寻址区的位地址映象表
⒊ 数据缓冲区
内RAM中30H~7FH为数据缓冲区,用于存放各种数据和中间结果,起到数据缓冲的作用。
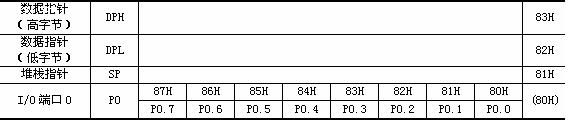
四、特殊功能寄存器(SFR)
特殊功能寄存器地址映象表(一)

特殊功能寄存器地址映象表(二)
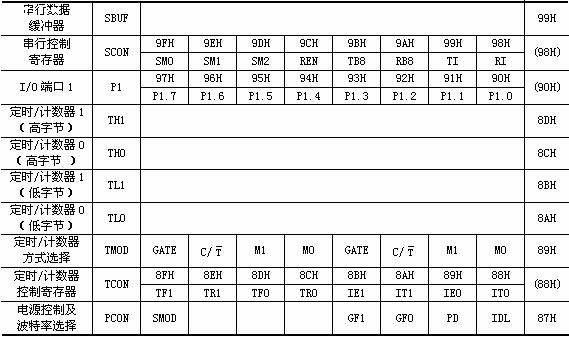
特殊功能寄存器地址映象表(三)
⑶ 程序状态字寄存器PSW
PSW也称为标志寄存器,了解这个对于了解单片机原理非常的重要,存放各有关标志。其结构和定义如下:

① Cy — 进位标志。
用于表示Acc.7有否向更高位进位。
② AC — 辅助进位标志。
用于表示Acc.3有否向Acc.4进位。
③ RS1、RS0 — 工作寄存器区选择控制位。
RS1、RS0 = 00 —— 0区(00H~07H)
RS1、RS0 = 01 —— 1区(08H~0FH)
RS1、RS0 = 10 —— 2区(10H~17H)
RS1、RS0 = 11 —— 3区(18H~1FH)
④ OV — 溢出标志。
表示Acc在有符号数算术运算中的溢出。

[
1] [
2] [
3]

本网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有,本站采用的非本站原创文章及图片等内容无法一一联系确认版权者。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时通过电子邮件或电话通知我们,以迅速采取适当措施,避免给双方造成不必要的经济损失。
推荐阅读
在A/D转换器中,因为输入的模拟信号在时间上式连续的,而输出的数字信号代码是离散的。所以A/D转换器在进行转换时,必须在一系列选定的瞬间(时间轴上的一些规定点上)对输入的模拟信号采样保持,然后再把这些采样值转换为数字量。因此,一般的A/D转换过程是通过采样保持、量化和编码这三个步骤完成的,即首先对输入的模拟电压采样保持,采样结束后进入保持时间,在这段时间内将采样的电压量转化为数字量,并按一定的编码形式给出转换结果,然后开始下一次采样。下图给出模拟量到数字量转换过程图:1、采样定理 可以证明,为了正确无误的用5.2.2图中所示的采样信号Vs表示模拟信号V1,必须满足: 因此,A/D转换器工作时采样频率必须高于上式所
发表于 2018-12-01

INT0请求标志位)和IE1由硬件自动清零;在电平触发方式下,不能自动清楚IE0和IE1。所以在中断返回前必须撤出INT0和INT1引脚的低电平,否则就会出现一次中断被CPU多次响应。 (3)串口中断中,CPU响应中断后,TI(串行口发送中断请求标志位)和RI(接收中断请求标志位)必须由软件清零。 (4)单片机复位后,TCON,SCON给位清零。C51语言允许用户自己写中断服务子程序(中断函数)首先来了解程序的格式:void 函数名() interrupt m [using n] {}关键字 interrupt m [using n] 表示这是一个
发表于 2018-12-01
其实学单片机使用的时候,往往大家都觉得简单,很快就过了,但其实有一些东西是值得深思的,我以前在写程序的时候往往都是发送数据,那么调用重写的printf()函数就可以了,但这次的项目中用到了NRF双全工通讯,这就需要串口的收发,这回就发生了写问题,具体的流水账就不说了。简单说就是串口收可比发讲究多了。void USART1_IRQHandler(void) //串口1中断服务程序{u8 i;if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//如果寄存器中有
发表于 2018-11-30
时钟采用LSI时钟,频率为38000Hz;为了使看门狗周期尽量大,将分频系数设置为256分频;因此在256分频情况下,看门狗超时时间最长,时间为1.7s左右:(254+1)*256/38000 = 1.717sTwdg = (C + 1) * PreDiv / f;其中: C为计数值,取值范围为0~254; PreDiv为分频系数,取固定值256; f为LSI时钟频率,固定为38000;
发表于 2018-11-30
前几天在写ARM时经常死机,莫名其妙,在这搜集了一些比较好的解答和方案,给大家参考。可能原因:一 振荡器停止振荡又可以分为电源电压不稳,或者强干扰引起的振荡器停振。二 PC指针跑飞电源电压不稳或强干扰引起PC跑飞,如果看门狗不好,也会引起死机。三 设计上对长引出线的IO没有保护,静电打在IO口上引起单片机死锁,破坏了硬件逻辑功能,导致死机。四. 复位收到干扰,引起反复复位,在反复复位当中有可能会导致死机。五.电源电压 的地 不稳 ,造成电源电压 瞬间负电压 导致单片机故障 程序不发运行综上所述:设计电路时,应该注意:1.电源稳定2.IO保护3.振荡器PCB布线要注意4.复位电路设计和PCB布线5.电源,信号线干扰路径
发表于 2018-11-30

的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等.软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使
发表于 2018-11-29



 数字系统设计基础教程
数字系统设计基础教程 数字电路实验教学大纲
数字电路实验教学大纲 单片机应用技术选编3
单片机应用技术选编3 D01逻辑门与555应用
D01逻辑门与555应用 RBF神经网络控制设计、分析及Matlab仿真
RBF神经网络控制设计、分析及Matlab仿真



