机车速度检测系统是关系机车可靠控制和机车安全运行的重要环节,直接影响机车运行的安全正点。目前周内铁路主要干线机车机车的过渡装置、监控装置、防空转系统、车载轴承检测装置所需的机车速度信号,是由安装在机车轮对车轴上的速度传感器提供的。普遍采用了光电速度传感器,速度信号提供给速度表、列车运行监控记录装置系统、机车控制电子柜以及内燃机车微机励磁系统。当机车回段检修时,由于不能动车或动车速度不高,没有速度信号输出或输出速度信号强度不够,因而这些需要速度信号的系统检测就成了机车测试、检修中一项比较困难的工作。为此,设计研制机车光电速度传感器模拟信号发生器,使机车在静态不动车情况下模拟发出速度信号,对满足机车检修工作的需要有着重要意义。
1 总体方案
1.1 系统设计原理
该设备发出的模拟信号要求与国内铁路各干线上目前所用的DF4D,DF8,DF11,SS7,SS8及SS9等型机车上所装的速度传感器输出信号相互兼容,同时由于各种机车轮径不同,该设备要能够调节轮径大小,并输出对应频率脉冲,该机车速度信号发生器应达到如下要求:1)信号输出为占空比为50%的方波信号,高电平选取12V;2)输出带宽为2~9 999Hz;3)输出最大直流电流为10 mA;4)输出精度为1%;5)采用数字
液晶表头显示对应机车速度;6)适用DF-16型各种光电式速度传感器。
1.2 主系统框图
主系统框图如图1所示。

2 系统设计
2.1 硬件电路设计
2.1.1 单片机来模拟传感器的脉冲信号发生电路
由于单片机的工作频率高达12 MHz,而机车速度信号经过换算后的最高频率是4.23 KHz(按300 km/h),因此用单片机设置模拟信号精度高(<0.05%),而且操作简单,界面友好。

2.1.2 电源系统
电源系统主要是为各个系统供电,为保证速度信号发生器和机车电路的安全,所有电源都采用了光耦隔离措施,确保了机车与发生器独立工作,本装置主要需要5 V、3.3 V等电源,均采用模块化的DC—DC开关电源,DC—DC开关电源具有极宽的输入范围。
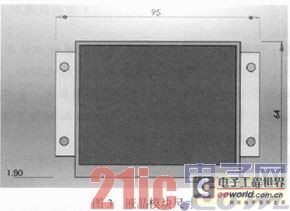
2.1.3 人机交互界面
采用3.5寸彩色液晶屏,该显示器采用TFT总线型,具有全硬件实现。不死机,稳定可靠。
2.1.4 速度信号输出与采集电路
为保证速度信号发生器和机车电路的安全,信号的输入输出都采用了光耦隔离措施,确保了机车与发生器独立工作。

2.2 软件设计
ATmega16在软件上能有效支持C语言及汇编语言。C语言目前已成为设计嵌入式系统的标准语言,它既有普通高级语言结构化编程、可读性好、维护方便的特点,又具有汇编等低级语言对硬件访问方便、代码效率高的特点。本设计是用C语言编程实现的,具有很好的可移植性,其程序流程图如图5所示。[page]

2.2.1 脉冲产生软件设计
速度信号发生器最重要的数据输出就是速度信号,速度信号的脉冲频率直接由速度和轮径决定,并且与速度成正比,与轮径成反比。该设备通过软件设定实际机车的轮径,并设定模拟速度,通过软件计算发送出对应的速度信号,下面介绍程序里的速度脉冲信号产生部分:


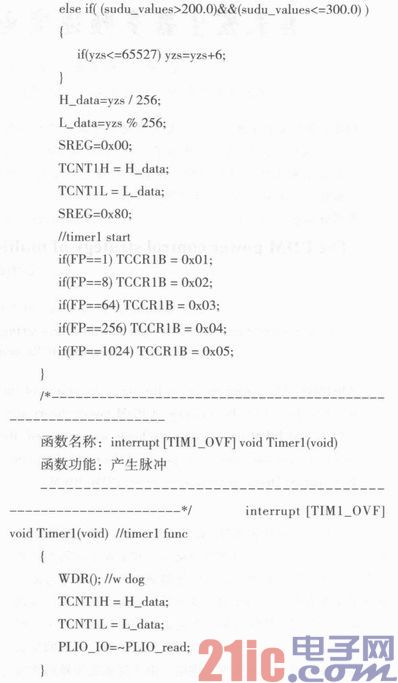
程序思路为:先由设定的速度和轮径,通过计算得出车轮转速,由车轮转速计算得出需要信号的周期,并对周期加以分析,通过特定参数对周期修正,得出需要的频率,最后配置定时器在I/O口输出对应的脉冲信号。
3 结束语
基于ATmega16单片机的便携式机车信号发生器具有功耗低、结构简单、性价比高等优点,并且减少了外围接口器件,提高了系统工作可靠性。
在实际应用中能同时测试四路机车速度信号,具有使用简单、可靠、维修方便、容易、操作安全、灵活等多种优点,测试结果直观,能直接显示出机车速度检测部分的电源错误、断路错误和速度检测准确度等。
上一篇:多点温湿度测控系统设计
下一篇:图解3D环境监测及评估系统的原理和设计实现
推荐阅读最新更新时间:2024-03-16 13:41

 汽车制动电子控制系统检测与维修
汽车制动电子控制系统检测与维修 模拟集成电路设计与仿真
模拟集成电路设计与仿真
设计资源 培训 开发板 精华推荐
- 【下载】LAT1416 借助 DMA 将内存图像旋转 90 度
- 【下载】LAT1426 IAR flashloader 下载算法制作介绍
- 【下载】LAT1431 STM32 AI Model Zoo 的安装及实例介绍
- 【下载】LAT1435 使用 GPDMA 进行 SPI LCD 整屏传输
- 【下载】LAT1438 AFCI 上位机用户手册
- 【下载】LAT1440 如何在特定串口工具上以不同颜色显示信息








- 你眼中的TI DSP有多么的与众不同?
- 等值现金悬赏,等你揭榜!
- TI 汽车应用在线展厅与你零距离接触,答题赢礼
- 畅游安富利人工智能云会展,挑战60天打卡学习养成记!冲击华为Mate40 Pro、Apple iPad Air等豪礼啦!
- [年末调查]工程师年末大盘点,你被点名了!
- 降碳行动:寻找身边8位单片机,抢楼赢ST最新M0开发板!
- Silicon Labs EFM32PG22开发套件 传你所思 创你所想!申请进行时!
- 了解并观看是德科技汽车电子、物联网(IOT)精彩专题,下载技术文章送好礼!
- 购买TI store MSP432P401R LaunchPad 晒单就送礼!
- 【投票瓜分2500元红包】2022得捷电子创新设计大赛优秀作品人气奖由你来定!




 京公网安备 11010802033920号
京公网安备 11010802033920号