本设计的整体框图如图所示,主要由超声波发射,超声波接收与信号转换,按键显示电路与温度传感器电路组成。超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差T,然后求出距离S=CT/2,式中的C 为超声波波速。在常温下,空气中的声速约为340m/s。由于超声波也是一种声波,其传播速度C与温度有关,在使用时,如果温度变化不大,则可认为声速是基本不变的。因本系统测距精度要求很高,所以通过对温度的检测对超声波的传播速度加以校正。超声波传播速度确定后,只要测得超声波往返的时间,即可求得距离。这就是超声波测距系统的基本原理。
超声波信号的发射与接收电路
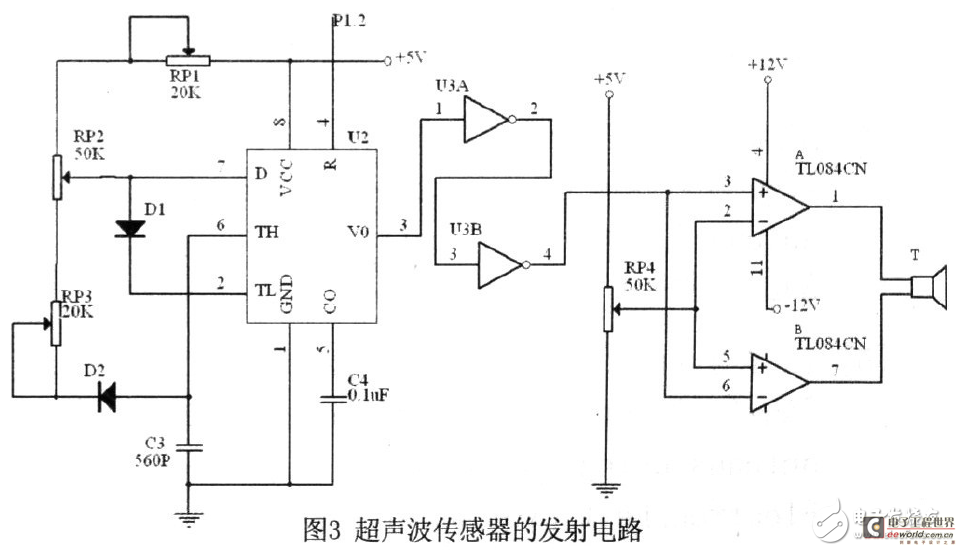
发射部分电路如图3所示,主要由脉冲调制信号产生电路,隔离电路以及驱动电路组成,用来为超声波传感器提供发送信号。脉冲调制信号产生电路中通过单片机对555定的复位(RESET)端的控制,使555定时器分时工作从而生产生脉冲频率为40KHz,周期为30ms 的脉冲调制信号,信号波形如图2所示,本设计中一个周期内发送10个脉冲信号。隔离电路主要是由两个与非门组成,对输出级与脉冲产生电路之间进行隔离。输出级由两个通用型集成运放TL084CN 组成,由于超声波传感器的发射距离与其两端所加的电压成正比,因此要求电路要产生足够大的驱动电压,其基本原理就是一个比较电路,当输入信号大于2.5V 时,运放A 的输出电压VA=+12V,运放B 的输出电压VB=-12V,当输入信号2.5V 时,运放A 的输出电压VA=“-12V”,运放B 的输出电压VB=+12V,所以在超声传感器两端得到两个极性完全相反的对称波形, 即VB=-VA , 所以加在超声波传感器两端的电压V=VA-VB=2VA,其两端的电压可达到24V,从而保证超声波能够发送较远的距离,提高了测量量程。
接收部分的电路由放大电路,带通滤波电路以及信号变换电路组成。放大电路和带通滤波电路如图4所示。由于超声波信号在空气中传播时受到很大程度的衰减,所以反射回的超声波信号非常的微弱,不能直接送到后级电路进行处理,必须将信号放大到足够的幅度,才能使后级电路对它进行正确的处理。前置放大电路是由集成运放组成的自举式同相交流放大电路,具有很高的输入阻抗,C5,C6,C7为隔直电容,R5,R6,R7为偏置电阻,用来设置放大器的静态工作点。带通滤波器采用二阶RC 有源滤波器,用于消除超声波传播过程中受到的干扰信号的影响。
放大电路与带通滤波电路

该电路为二阶压控电压源带通滤波电路,图中RW,C10 组成低通滤波网络,C9和R12组成高通滤波网络,两者串联组成了带通滤波电路。集成运放和电阻R9,RlO 一起组成同相比例放大器,为了使电路能够稳定工作,必须保证同相比例放大器的增益,带通滤波器的中心频率ω0=40kHz,电路参数可通过AV=1+R9/R10和ω0=1/R12C2(1/RW+1/R13)确定。经过带通滤波后的信号经专用仪表放大器AD620进行放大,然后送到信号变换电路,信号变换电路主要将接收到的包络信号变换成单片机的中断触发信号。由包络检波电路,电压比较器和RS 触发器组成。包络检波电路由二极管D3,电阻R19,和电容C13组成。经过包络检波得到的信号如图6中的V2所示。电压比较器由集成运放和电容电阻组成,为了消除发送探头的干扰信号,我们将单片机P1.2输出的信号加到电压比较器的同相端,它的波形是250μs 的高电平,和29750μs 低电平的方波,通过二极管D3将P1.2和比较器的正向端隔离。当P1.2输出高电平时,通过二极管对电容C14充电,由于二极管是正向导通的,所以充电很快,当P1.2输出为低电平时,二极管反向截止,电容通过电阻RW 和R21放电, 由于总电阻比较大,所以放电很缓慢,波形如图6中V3所示,从图中可看出,在没有收到返回信号时,比较器输出高电平,如果收到返回信号,比较器便输出低电平,输出波形如图6中Vo 所示,通过这种方法就可以消除发射探头对反射回的信号的干扰。[page]
信号变换电路
在发送端发送超声波信号时,P1.2输出高电平,经过反相器后,变为低电平加到触发器的R 端,因为没收到反射信号之前,电压比较器输出为高电平,所以基本RS 触发器的输入分别为,R=O,S=l,为0态,即Q=0,Q=1,Q 的信号加到单片机的中断输入端,因为单片机的中断为下降沿触发,输入为高电平,不产生中断。当发送完毕时,P1.2输出低电平,经反相器,变为高电平送到触发器的R 端,没有收到反射回的信号时,电压比较器输出仍为高电平,所以基本RS 触发器的R=“1”,S=1,为保持状态,即Q=1,Q=0,也不产生中断。当接收到反射回的信号时,电压比较器输出低电平,因此,基本RS 触发器的输入端R=“1”,S=0,触发器工作在0态,即Q=O,Q=1。单片机的中断输入端的电平由高电平变为低电平,从而使单片机产生中断。

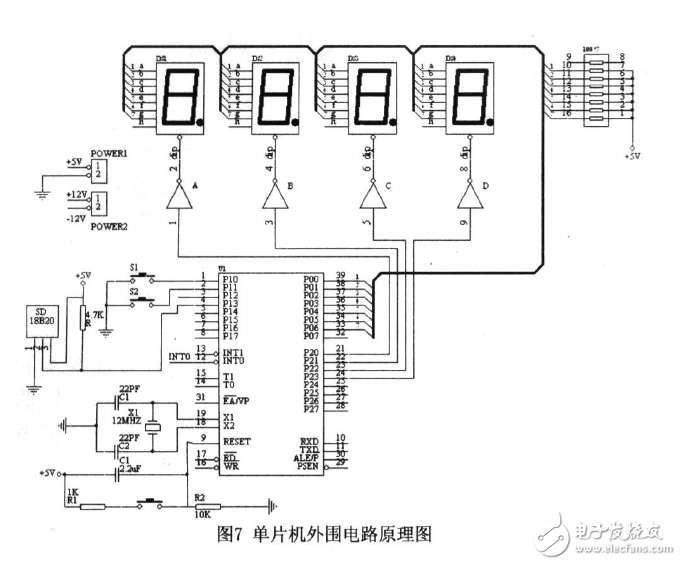
单片机的外围电路图如图7所示,显示电路由单片机控制七段数码管进行显示,采用数字温度传感器DS18820对环境温度进行检测,从而对超声波的传播速度进行温度补偿,提高测量精度。两个按键用于控制测量的开始与停止以及距离与温度显示的切换。
本系统由于发射功率和超声波发射探头的原因,测量距离在10cm 到500cm 之间,在近距离测量和远距离测量时存在误差较大,在50cm 和200cm 之间测量时精度最好,误差不大于1cm。在本设计中由于超声波发射周期为10个25μs 的方波,因此发射时间为T=250μs,已知常温下声速C 为340m/s,可知S=CT/2=250μs/2=8.5cm,因此确认测距盲区为9cm。即当测量距离小于9cm 时不能正确测量。
上一篇:使用LabVIEW、PXI和CompactRIO开发太空探索飞行器结构测试系统
下一篇:环路供电型热电偶温度测量电路设计
推荐阅读最新更新时间:2024-03-30 22:56

- 热门资源推荐
- 热门放大器推荐
 传感器应用技术 (张跃东)
传感器应用技术 (张跃东)






- 【STM32F103】RCC-使用HSE/HSI配置时钟
- Green Watt Power推出EVD500系列全封装500W DC/DC变换器,可应用于电动汽车
- 比亚迪将推新铁锂电池:能量密度升50%,寿命120万公里,成本降30%
- Vicor如何用标准硅FET甩了GaN和SiC几条街的?
- 欧盟研究毫米波无线通信系统 用于自动驾驶汽车远程通信
- 固态电池是“引爆”电动汽车的催化剂吗?
- 兆易创新推出GD32V系列RISC-V内核32位通用MCU新品
- 【STM32F103】中断综述
- 关于由CubeMx生成stm32f4+freertos,不正常分析之堆栈大小设置
- CubeMX Stm32F407生成一定周期的占空比不同的方波DMA+定时器




 京公网安备 11010802033920号
京公网安备 11010802033920号