电路功能与优势
图1所示紧凑型双芯片电路提供非接触式各向异性磁阻(AMR)测量解决方案,可用于角度或线性位置测量。该双芯片系统在180°范围内具有优于0.2°的角精度,在0.5英寸范围内具有2 mil(0.002英寸)线性精度,具体取决于所用磁体的尺寸。
该电路适用于高速、高精度、非接触式角度和长度测量关键型应用,比如机床速度控制、起重机角度控制、无刷直流电机和其他工业或汽车应用。
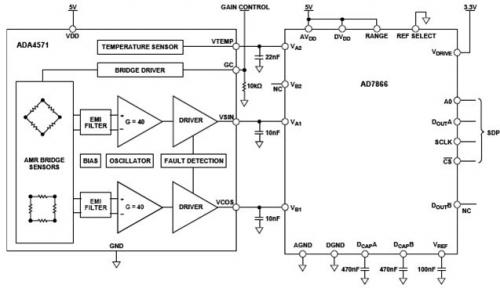
图1.磁阻角度和线性检测系统(原理示意图:未显示去耦和所有连接)
电路描述
ADA4571是一款各向异性磁阻(AMR)传感器,集成信号调理放大器和ADC驱动器,以及用于温度补偿的温度传感器。
ADA4571产生两路模拟输出,指示周围磁场的角位置。
ADA4571集成一个AMR传感器和一个固定增益(标称值G = 40)仪表放大器。ADA4571可提供有关旋转磁场角度的干净且经过放大的余弦和正弦输出信号。T输出电压范围与电源电压成比例。
传感器含有两个互成45°角的透磁合金惠斯登电桥。x-y传感器平面的旋转磁场提供两路正弦输出信号,且传感器与磁场方向的角度(α)频率翻倍。在x-y平面的均质场内,输出信号与z方向(气隙)的物理位置无关。
正弦和余弦输出端的输出电压摆幅范围为7% VDD至93% VDD.有两个诊断频段(VDD的0%至7%和VDD的93%至100%),因而可向所有内部连接提供焊线断开检测。
ADA4571采用8引脚SOIC封装。
VSIN和VCOS输出的输出阻抗为50Ω,采用外部10 nF电容时组成318 kHz噪声滤波器。
AD7866是一款双通道、同步采样、12位、1 MSPS SAR ADC.RANGE引脚的极性确定模拟输入范围和输出编码。如果片选信号变为低电平时该引脚连接逻辑高电平,则下次转换的模拟输入范围为0 V至2×VREF(0 V至5 V),为ADA4571 AMR传感器的0.35 V至4.65 V信号提供大约350 mV裕量。
将REFSEL引脚连接至低电平可配置ADC使用内部2.5 V基准电压源。VREF引脚提供该电压,但将其用于系统的其他位置前必须先使用缓冲器。DCAPA引脚和DCAPB引脚采用470 nF电容去耦,确保ADC正常工作。
AD7866同步采样传感器的两个通道。数字字通常在DOUTA和DOUTB端提供。每个数据流包括1个前导零,随后是3个状态位,再加上12位转换数据。然而,保持CS引脚为低电平并持续额外16个时钟周期,则两个数字字均可从一个通道(DOUTA)获取。因此,SPI接口允许在一条数据线路上访问两个通道。
AD7866的两个ADC输入均带有双通道多路复用器。A0输入引脚上的逻辑0允许A1和A2输入端转换,而A0输入引脚上的逻辑1允许B1和B2输入端转换。ADA4571的温度传感器输出连接AD7866的B1输入,并允许对系统进行软件温度校准。
磁阻(MR)理论
磁阻是存在外部磁场时,材料改变其电阻值的能力。最常用的MR传感器基于AMR技术。
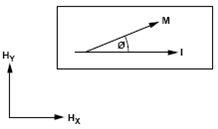
图2.各向异性磁阻示例
AMR效应示例如图2所示。电流(I)流过导体,受外部磁场(HY)影响。导体电阻的变化与磁化矢量(M)和电流矢量(I)之间的角度成函数关系。磁化矢量是内部磁场(HX)与施加的外部磁场(HY)的净求和结果。
当磁化矢量(M)与电流矢量(I)平行时,具有最大电阻。当磁化矢量(M)与电流矢量(I)垂直时,具有最小电阻。
有效利用AMR效应要求导体自身必须对机械应力材料不敏感,但对磁约束敏感。由于这些原因,透磁合金(80%镍,20%铁)是AMR传感器制造中最常用的合金。
透磁合金属性
透磁合金条有两个属性,创建角度测量系统时会具有设计挑战性。
首先,透磁合金具有较窄的线性工作区(见图3)。仅当磁化矢量(M)和电流矢量(I)之间的角度变大时,响应才是线性的。不幸的是,线性响应不久后透磁合金就会饱和。
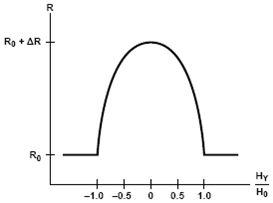
图3.透磁合金电阻与磁场的关系
其次,透磁合金对极性不敏感。无论磁化矢量(M)和电流矢量(I)之间的角度是正或负,透磁合金条的电阻都将下降。
双色条磁极
改善透磁合金条线性度和磁极非敏感特性的常用方法是与金属条的轴向成45°添加铝条(称为双色条磁极,如图4所示)。双色条磁极间流动的任何电流都将走最短的路径——垂直路径,并且电流矢量(I)和磁化矢量(M)之间的角度偏移45°。
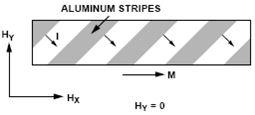
图4.透磁合金条的双色条磁极效应
图5显示向透磁合金条中加入双色条磁极后的结果。电流矢量偏移45,但磁化矢量保持不变。注意,线性特性现在存在于图形的中央部分。
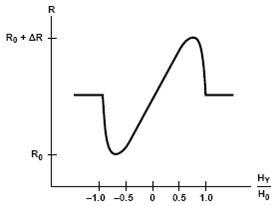
图5.双色条磁极透磁合金电阻与磁场的关系
磁场强度
磁场强度至少为25 kA/m,才能确保满足ADA4571数据手册中的规格。该激励磁场必须与ADA4571封装内传感元件的中央部分相交。
选择磁体时,需考虑传感器和磁体之间的气隙,如图6所示。如果磁体未靠近传感器放置(即距离d极大),则可能需要更强或更大的磁体才能确保达到最小磁场强度要求。
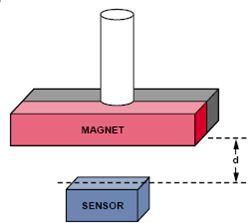
图6.用于转轴角度测量的磁体方向与气隙
传感器基础知识
标准AMR传感器由两个惠斯登电桥组成,互相之间的相对角度为45°,如图7所示。
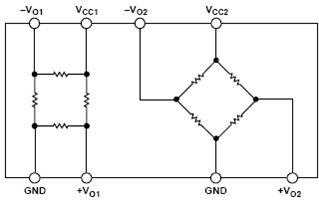
图7. ADA4571双惠斯登电桥配置
旋转磁场产生正弦和余弦输出信号,如图8所示。两个信号在180°范围内均为周期信号,因此没有额外元件或参考点就无法进行全方位360°测量检测。
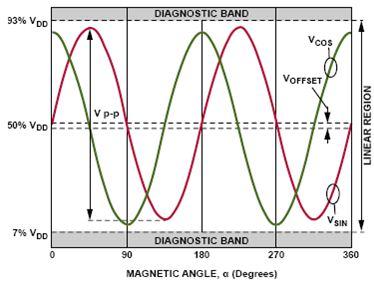
图8.磁阻传感器输出电压
通道灵敏度
ADA4571传感器标称灵敏度为每通道52 mV/°,这意味着磁化矢量和传感器方向之间的每一度变化都会产生52 mV的输出电压改变。角度的灵敏度并非常量。灵敏度下降的部分是线路斜率接近零时的输出部分。
如图8所示,余弦输出(绿线)在磁化矢量角度接近0°、90°、180°或270°时损失灵敏度。类似地,正弦输出(红线)在磁化矢量角度接近45°、135°、225°和315°时损失灵敏度。幸运的是,当一个通道的灵敏度降低时,另一个通道处于高灵敏度区域。
系统带宽、磁场旋转
磁场角度矢量是理解电路带宽的重要内容。ADC每微秒转换一个样本。为了获得1°分辨率,磁场1 ms只能移动1°(2.778 kHz),否则ADC无法以足够高的速度进行采样,以便跟上磁场变化的速度。对于1 MSPS ADC,这表示磁场的最大可用角速度为2.778 kHz.
旋转测量测试结果
将直径方向的N42磁体(直径= 0.5英寸,厚度= 0.125英寸)连接至金属杆的末端。精密直流电机可对金属杆进行精细角度控制。传感器精确安装在磁体正面。气隙设为2 mm.只要磁铁激励使传感器完全饱和,则结果便与气隙基本无关。
电机转动,创造出与传感器相交的旋转磁场,进而产生重复性正弦和余弦输出电压,适合进行角度计算和数据采集。
图9显示了该设置的功能框图。图10是该设置的照片,可用来采集轴尾配置的数据。该设置由无刷直流电机、物理安装、磁体和集成相应ADA4571传感器的PCB组成。
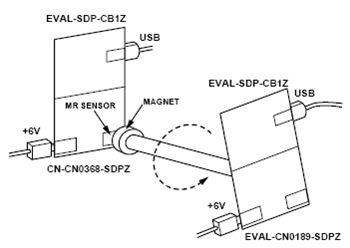
图9.数据采集测试设置——轴尾配置

图10.无刷直流电机基准测试设置照片
图11通过磁体的多次转动,将电机的机械角与传感器的计算磁场角相比较。该计算利用两个输出之比的反正切函数。未进行校准时,误差接近±1°。
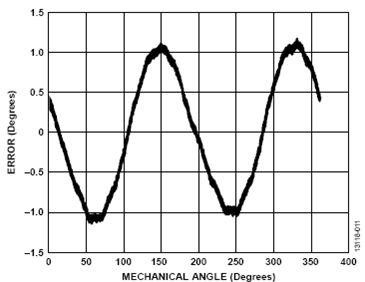
图11.失调校正前的角误差与机械角之间的关系
图12显示仅有一次失调校正的误差。无需针对正弦和余弦的幅度失配、非线性度或正交性校正进行额外调节。使用每个通道的峰峰值或平均值可确定失调值,因为它贯穿整个机械旋转。从对应通道中减去失调,以获得线性传感器响应。最大误差接近±0.2°,而该范围内的绝大部分误差小于±0.1°。
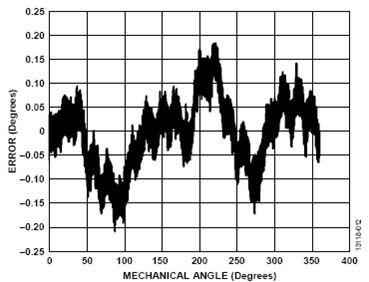
图12.仅针对失调进行校正后的角误差与机械角的关系
PCB布局考虑
CN-0368系统的PCB采用4层板堆叠而成,具有较大面积的接地层和电源层多边形。
在任何注重精度的电路中,必须仔细考虑电路板上的电源和接地回路布局。PCB应尽可能隔离数字部分和模拟部分。有关布局和接地的详细论述,请参见MT-031指南;有关去耦技术的信息,请参见MT-101指南。
所有IC的电源应当用1μF和0.1μF电容去耦,以适当抑制噪声并减小纹波。这些电容应尽可能靠近器件。对于所有高频去耦,建议使用陶瓷电容。
电源走线应尽可能宽,以提供低阻抗路径,并减小电源线路上的毛刺效应。通过数字地将时钟及其它快速开关数字信号屏蔽起来,使之不影响电路板的其它器件。图13为PCB的照片。
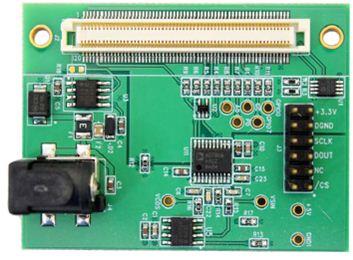
图13. EVAL-CN0368-SDPZ板的照片
常见变化
如需1 MSPS以上采样速率,应考虑使用下列同步采样ADC;
如需12位或14位以上的分辨率,可使用AD7655(1 MSPS时为16位)。
电路评估与测试
本电路使用EVAL-SDP-CB1Z系统演示平台(SDP)板和EVAL-CN0368-SDPZ电路板。这两片板具有120引脚的对接连接器,可以快速完成设置并评估电路性能。
EVAL-SDP-CB1Z板与CN0368评估软件一同使用,捕获EVAL-CN0368-SDPZ电路板的数据。
设备要求
需要以下设备:
带USB端口和Windows XP(32位)、Windows Vista(32位)或Windows 7(32位)PC
EVAL-CN0368-SDPZ电路板
EVAL-SDP-CB1Z SDP板
6 V电源或壁式电源适配器
CN0368评估软件
传感器封装处磁场强度不低于25 kA/m的钕磁体
开始使用
将CN0368评估软件光盘放入PC,加载评估软件。打开我的电脑,找到包含评估软件光盘的驱动器,打开Readme文件。按照Readme文件中的说明安装和使用评估软件。
功能框图
图14所示为测试设置的功能框图。
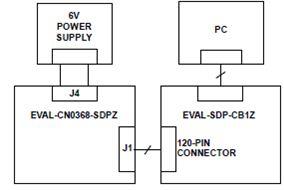
图14.测试设置框图
设置
将EVAL-CN0368-SDPZ上的120引脚连接器连接到EVAL-SDP-CB1Z上的连接器。使用尼龙五金配件,通过120引脚连接器两端的孔牢牢固定这两片板。
在断电情况下,将6 V直流管式插孔连接到J4连接器。将EVAL-SDP-CB1Z附带的USB电缆连接到PC上的USB端口。此时请勿将该USB电缆连接到SDP板上的微型USB连接器。
将钕磁体直接放置在IC之上,或置于专为旋转磁体而设计的夹具中,使IC和磁体的距离最短。
使磁场的其他来源远离IC很重要,因为任何杂散磁场都会使传感器输出电压产生误差。
测试
为直流管式插孔、J4连接器上电。启动CN0368评估软件,并通过USB电缆将PC连接到EVAL-SDP-CB1Z上的微型USB连接器。
一旦USB通信建立,就可以使用EVAL-SDP-CB1Z来发送、接收和捕捉来自EVAL-CN0368-SDPZ的串行数据。
关键字:AMR ADA4571
引用地址:最完整的磁阻角度和线性位置测量系统解决方案
图1所示紧凑型双芯片电路提供非接触式各向异性磁阻(AMR)测量解决方案,可用于角度或线性位置测量。该双芯片系统在180°范围内具有优于0.2°的角精度,在0.5英寸范围内具有2 mil(0.002英寸)线性精度,具体取决于所用磁体的尺寸。
该电路适用于高速、高精度、非接触式角度和长度测量关键型应用,比如机床速度控制、起重机角度控制、无刷直流电机和其他工业或汽车应用。

图1.磁阻角度和线性检测系统(原理示意图:未显示去耦和所有连接)
电路描述
ADA4571是一款各向异性磁阻(AMR)传感器,集成信号调理放大器和ADC驱动器,以及用于温度补偿的温度传感器。
ADA4571产生两路模拟输出,指示周围磁场的角位置。
ADA4571集成一个AMR传感器和一个固定增益(标称值G = 40)仪表放大器。ADA4571可提供有关旋转磁场角度的干净且经过放大的余弦和正弦输出信号。T输出电压范围与电源电压成比例。
传感器含有两个互成45°角的透磁合金惠斯登电桥。x-y传感器平面的旋转磁场提供两路正弦输出信号,且传感器与磁场方向的角度(α)频率翻倍。在x-y平面的均质场内,输出信号与z方向(气隙)的物理位置无关。
正弦和余弦输出端的输出电压摆幅范围为7% VDD至93% VDD.有两个诊断频段(VDD的0%至7%和VDD的93%至100%),因而可向所有内部连接提供焊线断开检测。
ADA4571采用8引脚SOIC封装。
VSIN和VCOS输出的输出阻抗为50Ω,采用外部10 nF电容时组成318 kHz噪声滤波器。
AD7866是一款双通道、同步采样、12位、1 MSPS SAR ADC.RANGE引脚的极性确定模拟输入范围和输出编码。如果片选信号变为低电平时该引脚连接逻辑高电平,则下次转换的模拟输入范围为0 V至2×VREF(0 V至5 V),为ADA4571 AMR传感器的0.35 V至4.65 V信号提供大约350 mV裕量。
将REFSEL引脚连接至低电平可配置ADC使用内部2.5 V基准电压源。VREF引脚提供该电压,但将其用于系统的其他位置前必须先使用缓冲器。DCAPA引脚和DCAPB引脚采用470 nF电容去耦,确保ADC正常工作。
AD7866同步采样传感器的两个通道。数字字通常在DOUTA和DOUTB端提供。每个数据流包括1个前导零,随后是3个状态位,再加上12位转换数据。然而,保持CS引脚为低电平并持续额外16个时钟周期,则两个数字字均可从一个通道(DOUTA)获取。因此,SPI接口允许在一条数据线路上访问两个通道。
AD7866的两个ADC输入均带有双通道多路复用器。A0输入引脚上的逻辑0允许A1和A2输入端转换,而A0输入引脚上的逻辑1允许B1和B2输入端转换。ADA4571的温度传感器输出连接AD7866的B1输入,并允许对系统进行软件温度校准。
磁阻(MR)理论
磁阻是存在外部磁场时,材料改变其电阻值的能力。最常用的MR传感器基于AMR技术。

图2.各向异性磁阻示例
AMR效应示例如图2所示。电流(I)流过导体,受外部磁场(HY)影响。导体电阻的变化与磁化矢量(M)和电流矢量(I)之间的角度成函数关系。磁化矢量是内部磁场(HX)与施加的外部磁场(HY)的净求和结果。
当磁化矢量(M)与电流矢量(I)平行时,具有最大电阻。当磁化矢量(M)与电流矢量(I)垂直时,具有最小电阻。
有效利用AMR效应要求导体自身必须对机械应力材料不敏感,但对磁约束敏感。由于这些原因,透磁合金(80%镍,20%铁)是AMR传感器制造中最常用的合金。
透磁合金属性
透磁合金条有两个属性,创建角度测量系统时会具有设计挑战性。
首先,透磁合金具有较窄的线性工作区(见图3)。仅当磁化矢量(M)和电流矢量(I)之间的角度变大时,响应才是线性的。不幸的是,线性响应不久后透磁合金就会饱和。

图3.透磁合金电阻与磁场的关系
其次,透磁合金对极性不敏感。无论磁化矢量(M)和电流矢量(I)之间的角度是正或负,透磁合金条的电阻都将下降。
双色条磁极
改善透磁合金条线性度和磁极非敏感特性的常用方法是与金属条的轴向成45°添加铝条(称为双色条磁极,如图4所示)。双色条磁极间流动的任何电流都将走最短的路径——垂直路径,并且电流矢量(I)和磁化矢量(M)之间的角度偏移45°。

图4.透磁合金条的双色条磁极效应
图5显示向透磁合金条中加入双色条磁极后的结果。电流矢量偏移45,但磁化矢量保持不变。注意,线性特性现在存在于图形的中央部分。

图5.双色条磁极透磁合金电阻与磁场的关系
磁场强度
磁场强度至少为25 kA/m,才能确保满足ADA4571数据手册中的规格。该激励磁场必须与ADA4571封装内传感元件的中央部分相交。
选择磁体时,需考虑传感器和磁体之间的气隙,如图6所示。如果磁体未靠近传感器放置(即距离d极大),则可能需要更强或更大的磁体才能确保达到最小磁场强度要求。

图6.用于转轴角度测量的磁体方向与气隙
传感器基础知识
标准AMR传感器由两个惠斯登电桥组成,互相之间的相对角度为45°,如图7所示。

图7. ADA4571双惠斯登电桥配置
旋转磁场产生正弦和余弦输出信号,如图8所示。两个信号在180°范围内均为周期信号,因此没有额外元件或参考点就无法进行全方位360°测量检测。

图8.磁阻传感器输出电压
通道灵敏度
ADA4571传感器标称灵敏度为每通道52 mV/°,这意味着磁化矢量和传感器方向之间的每一度变化都会产生52 mV的输出电压改变。角度的灵敏度并非常量。灵敏度下降的部分是线路斜率接近零时的输出部分。
如图8所示,余弦输出(绿线)在磁化矢量角度接近0°、90°、180°或270°时损失灵敏度。类似地,正弦输出(红线)在磁化矢量角度接近45°、135°、225°和315°时损失灵敏度。幸运的是,当一个通道的灵敏度降低时,另一个通道处于高灵敏度区域。
系统带宽、磁场旋转
磁场角度矢量是理解电路带宽的重要内容。ADC每微秒转换一个样本。为了获得1°分辨率,磁场1 ms只能移动1°(2.778 kHz),否则ADC无法以足够高的速度进行采样,以便跟上磁场变化的速度。对于1 MSPS ADC,这表示磁场的最大可用角速度为2.778 kHz.
旋转测量测试结果
将直径方向的N42磁体(直径= 0.5英寸,厚度= 0.125英寸)连接至金属杆的末端。精密直流电机可对金属杆进行精细角度控制。传感器精确安装在磁体正面。气隙设为2 mm.只要磁铁激励使传感器完全饱和,则结果便与气隙基本无关。
电机转动,创造出与传感器相交的旋转磁场,进而产生重复性正弦和余弦输出电压,适合进行角度计算和数据采集。
图9显示了该设置的功能框图。图10是该设置的照片,可用来采集轴尾配置的数据。该设置由无刷直流电机、物理安装、磁体和集成相应ADA4571传感器的PCB组成。

图9.数据采集测试设置——轴尾配置

图10.无刷直流电机基准测试设置照片
图11通过磁体的多次转动,将电机的机械角与传感器的计算磁场角相比较。该计算利用两个输出之比的反正切函数。未进行校准时,误差接近±1°。

图11.失调校正前的角误差与机械角之间的关系
图12显示仅有一次失调校正的误差。无需针对正弦和余弦的幅度失配、非线性度或正交性校正进行额外调节。使用每个通道的峰峰值或平均值可确定失调值,因为它贯穿整个机械旋转。从对应通道中减去失调,以获得线性传感器响应。最大误差接近±0.2°,而该范围内的绝大部分误差小于±0.1°。

图12.仅针对失调进行校正后的角误差与机械角的关系
PCB布局考虑
CN-0368系统的PCB采用4层板堆叠而成,具有较大面积的接地层和电源层多边形。
在任何注重精度的电路中,必须仔细考虑电路板上的电源和接地回路布局。PCB应尽可能隔离数字部分和模拟部分。有关布局和接地的详细论述,请参见MT-031指南;有关去耦技术的信息,请参见MT-101指南。
所有IC的电源应当用1μF和0.1μF电容去耦,以适当抑制噪声并减小纹波。这些电容应尽可能靠近器件。对于所有高频去耦,建议使用陶瓷电容。
电源走线应尽可能宽,以提供低阻抗路径,并减小电源线路上的毛刺效应。通过数字地将时钟及其它快速开关数字信号屏蔽起来,使之不影响电路板的其它器件。图13为PCB的照片。

图13. EVAL-CN0368-SDPZ板的照片
常见变化
如需1 MSPS以上采样速率,应考虑使用下列同步采样ADC;
如需12位或14位以上的分辨率,可使用AD7655(1 MSPS时为16位)。
电路评估与测试
本电路使用EVAL-SDP-CB1Z系统演示平台(SDP)板和EVAL-CN0368-SDPZ电路板。这两片板具有120引脚的对接连接器,可以快速完成设置并评估电路性能。
EVAL-SDP-CB1Z板与CN0368评估软件一同使用,捕获EVAL-CN0368-SDPZ电路板的数据。
设备要求
需要以下设备:
带USB端口和Windows XP(32位)、Windows Vista(32位)或Windows 7(32位)PC
EVAL-CN0368-SDPZ电路板
EVAL-SDP-CB1Z SDP板
6 V电源或壁式电源适配器
CN0368评估软件
传感器封装处磁场强度不低于25 kA/m的钕磁体
开始使用
将CN0368评估软件光盘放入PC,加载评估软件。打开我的电脑,找到包含评估软件光盘的驱动器,打开Readme文件。按照Readme文件中的说明安装和使用评估软件。
功能框图
图14所示为测试设置的功能框图。

图14.测试设置框图
设置
将EVAL-CN0368-SDPZ上的120引脚连接器连接到EVAL-SDP-CB1Z上的连接器。使用尼龙五金配件,通过120引脚连接器两端的孔牢牢固定这两片板。
在断电情况下,将6 V直流管式插孔连接到J4连接器。将EVAL-SDP-CB1Z附带的USB电缆连接到PC上的USB端口。此时请勿将该USB电缆连接到SDP板上的微型USB连接器。
将钕磁体直接放置在IC之上,或置于专为旋转磁体而设计的夹具中,使IC和磁体的距离最短。
使磁场的其他来源远离IC很重要,因为任何杂散磁场都会使传感器输出电压产生误差。
测试
为直流管式插孔、J4连接器上电。启动CN0368评估软件,并通过USB电缆将PC连接到EVAL-SDP-CB1Z上的微型USB连接器。
一旦USB通信建立,就可以使用EVAL-SDP-CB1Z来发送、接收和捕捉来自EVAL-CN0368-SDPZ的串行数据。
上一篇:便携式锂电池安全测试方案助力可穿戴设备
下一篇:电阻应变片直流电桥测量电路攻略
推荐阅读最新更新时间:2024-03-30 23:25
何时更换水表与煤气表都不用再靠猜测?
近年来,全球各国自来水与煤气公司都开始在采用电池供电的无线自动读表(AMR)网络上投下巨资,以期获得长期收益,包括降低人工抄表的人力成本、更加快速可靠地进行抄表以及增强数据捕获与通讯能力等。 需要解决的重要问题之一是精确测定这些系统的预期工作寿命,管理人员要避免在电池达到工作寿命之后再大规模更换。频繁更换整个系统的电池所带来的成本,可能导致建立AMR网络能节省成本的说法站不住脚。 美国Springfield自来水及下水道管理委员会(WSC)几年前刚安装了大约44,000个AMR表,现在开始每年更换大约4,000个水表,预计总成本为9,200万美元。由于意识到无法一次性完成更换44,000个水表的工作,WSC决定利用
[工业控制]
十大AMR顶部模块应用实现产线物流全场景自动化

近年来,通过自动化技术实现智能转型已成为制造业获得更高效率、产能与竞争力的必要路径。除了生产方式本身的技术升级外,越来越多的企业开始关注价值链中的物料运输环节,希望通过经济高效的方式,改变传统产线运输工作对人工的重度依赖,提升内部物流的准确度、速度和安全性。 全球移动机器人市场的领导者- Mobile Industrial Robots(以下简称:MiR)认为自主移动机器人(Autonomous Mobile Robot – AMR) 技术能够从十个方面实现制造企业产线物流自动化转型 。借助MiRGo平台提供的丰富顶部模块应用,AMR能够从物料入库环节开始,直至成品出库,全流程帮助企业员工从事更高价值的工作,为企业提供可靠的内
[工业控制]

通过电力线通信(PLC/AMR)实现自动抄表
引言 在20世纪的大部分时间,电力公司的抄表员通过挨家挨户查看电表的机电式计数器来记录用电量。再到办公室将记录的电表读数输入到电力公司的用户收费记录中。如今,随着技术的进步,这种劳动密集型的人工抄表操作已经逐步被自动抄表(AMR)系统所取代。 在20世纪90年代早期的AMR市场,电力公司认识到AMR的商业价值,因为减少抄表的员工数量可节省费用支出。那时,电力公司只需要每月对居民/工业用户进行一次抄表,因此早期的AMR系统采用近距离方案,仍然需要去电表现场抄表。数据流是单向的:从电表到电力公司工作人员持有的抄表器终端。 如今,对AMR的要求已经远远超出了节省抄表成本这一点。现在,电力公司为了更有效地管理他们的资源,正
[工业控制]
科普小课堂 | Rebin老师带你重新认识什么是AMR?
自KUKA AMR官微上线以来,一直有小伙伴在后台留言,你们的热情我们都收到啦~ 在众多留言中,也不乏一些小伙伴们还没能搞清楚到底什么是AMR,希望我们能帮忙科普一下。 那……将宠粉作为己任的我们,怎么能拒绝呢?这就安排! 小库连夜在公司内部预约了售前方案部负责人伍兵Rebin Wu为大家答疑解惑~ 伍兵 Rebin Wu 库卡移动机器人售前方案总监 现负责库卡移动机器人售前团队管理、解决方案设计、方案品质把控及落地交付支持等工作,具有10年以上智能物流和智能制造行业经验,曾就职于富士康、快仓智能等行业知名企业,参与并主导了多个不同行业领域AGV/AMR项目,积累了丰富的行业拓展及项目实践经验,包括富士康智能工厂AGV项目、P
[机器人]
MiR电子书:快消品市场蓄势复苏,AMR赋能快消行业三大作业流程
中国消费品市场2023年的发展主题是无疑是“扩大内需”,在政策推动以及14亿人口的巨大市场基础下,本土消费品企业蓄势重启、增长向好。而在“新零售“这一语境下,快消品行业更面临着更高的生产要求,从智能制造到智慧物流,企业纷纷借力自动化技术迎接巨大的商机。 全球移动 机器人 市场的领导者- Mobile Industrial Robots(以下简称:MiR)今日发布《高效内部物流如何帮助包装消费品和快速消费品公司提升竞争力》电子书 (点击链接下载报告),聚焦快速消费品(FMCG)和包装消费品(CPG)行业的物流痛点,分享自主移动机器人(AMR – Autonomous Mobile Robot)这一灵活、高效、安全的自动化手段如何能够
[机器人]
高通推出RB5自主移动机器人(AMR)参考设计
随着扩展至智能手机以外的众多领域,技术积极利用5G拓展和变革机器人行业。在一年一度的高通5G峰会上,公司推出高通机器人RB6平台和高通RB5自主移动机器人(AMR)参考设计,扩展其具备前沿5G和边缘技术的机器人解决方案路线图。高通技术公司的先进边缘AI机器人解决方案将支持打造更高效、更自主、更先进的机器人。上述解决方案将助力推动众多商业领域的创新,包括AMR、配送机器人、高度自动化制造机器人、协作机器人、城市空中移动(UAM)飞行器、工业基础设施和自主安防解决方案等。
上述全新解决方案融合了增强的高通AI引擎和5G功能,将支持包括以下范例在内的前沿应用并赋能创新,助力打造更智能、更安全的机器人和环境:
增强配送机器人
[机器人]
斯坦德机器人63台AMR助力光伏企业实现物料全自动搬运
今年上半年,在“碳达峰碳中和”目标引领下,我国光伏产业保持快速增长态势,产业规模持续扩大。在实现中国“3060”目标的过程中,光伏产业将大有可为,而技术、效率和信息化程度是产业发展背后的重要推力。目前,光伏产线自动化水平进一步提升,逐步实现多关节机器人进行工序的串联,过去1GW产能需要近2000人完成工作,现在的人工规模已下降到200人左右。 作为自主移动机器人行业的头部,斯坦德机器人积极入局光伏产业,为光伏企业的满产提效拼出发展加速度。在国内某知名光伏企业生产线上,斯坦德机器人投入63台AMR,协助企业实现了整厂的全自动搬运。该企业负责人指出:“63台AMR成功替代了90名技术人员,稳定运行后实现了100%代替人工搬运。不
[机器人]
 实时数字信号处理 实践方法与应用 原书第2版
实时数字信号处理 实践方法与应用 原书第2版 深入浅出通信原理
深入浅出通信原理 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南










 京公网安备 11010802033920号
京公网安备 11010802033920号