一、垂直噪声从哪里来?
示波器的垂直噪声主要来自两个方面:
1、模拟前端电路的噪声:
包括衰减电路的噪声、缓冲电路的噪声、放大器的噪声以及电源的噪声。
因为随机噪声的无界性、随机性,带宽越高,噪声频谱越宽,模拟前端电路的噪声越大。示波器的基线本底噪声主要由这部分决定,这也是评价模拟前端设计好坏的重要指标。
2、模拟信号数字化过程产生的噪声:
主要是ADC的量化噪声。
关于ADC的量化噪声,贝尔实验室的W. R. Bennett 1948年发表的经典论文中有一条很有名的公式可以表征:

以ZDS2022中使用的ADC为例,它的分辨率为8bit,采样率为1GSa/s,带宽为200MHz,计算可得ADC量化过程的信噪比为53.9dB。所以在最小垂直档位2mV/div下的量化噪声有效值为14uVrms,基本可以忽略不计,在该档位下噪声主要来自模拟前端。测量10mVpp的方波,波形迹线会变粗,测量误差主要来自模拟前端的本底噪声。

图1 2mV/div档位下测试10mVpp的方波峰峰值误差
但是当垂直档位越大,量化噪声逐渐占主导地位,而模拟前端噪声虽然会随着放大器的增益变化产生微小的改变,但是仍然在2mV以下。
示波器通常为了防止ADC超出限制,留了±1div的裕量,实际垂直幅度范围为10div,所以在1V/div档位下ADC的1LSB为40mV左右,按照最大量化误差±0.5LSB计算,ZDS2022在该档位下的量化噪声为40mVpp。测量幅度为5Vpp的方波信号,测量误差主要来自量化噪声。
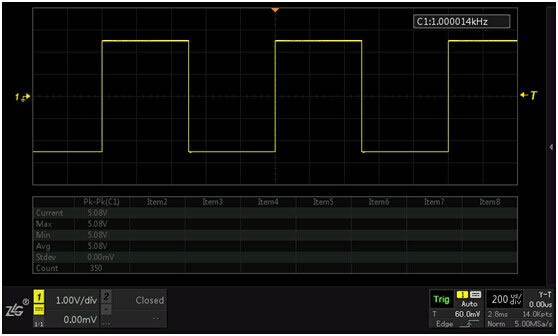
图2 1V/div档位测试5Vpp方波信号的峰峰值误差
二、垂直噪声会带来什么影响?
示波器垂直噪声会从很多方面影响信号的精确测量,它会:
1、引入幅度测量误差;
2、引入sin(x)/x波形重建不确定度;
3、在进行小信号测量时会导致触发抖动,无法稳定波形,这时必须设置触发耦合为高频抑制,并适当增大触发灵敏度;
4、产生显示不良的“胖波形”。
三、如何评估示波器的底噪?
既然底噪如此重要,要怎么评估一台示波器的底噪呢?通常认为示波器的基线本底噪声是示波器垂直档位置于灵敏度最高条件下测得的。但是市面上很多示波器在最高灵敏度档位下,由于放大器增益大于40dB,带宽通常会有所降低。所以要比较不同示波器的底噪,应该把相同带宽特征的示波器放在一起,对比他们在全带宽条件下最高灵敏度档位的基线本底噪声。
因为噪声服从高斯分布,存在随机性、无界性,噪声测量中收集的数据越多,得到的噪声峰峰值偏移更高,基于这一原因像垂直噪声和随机抖动这类随机现象应使用RMS(均方根)值来进行定义和测量。
为了比较各公司不同型号示波器的基线本底噪声,需要将它们各种设置置于尽量接近的条件,步骤如下:
1、打开通道1,设置为直流耦合,输入阻抗设置为1MΩ,关闭带宽限制,置于2mV/div垂直档位;
2、断开探头的连接,将输入端口接地,并远离可能耦合进来的噪声源;
3、将时基档位设置为20ns/div,存储深度尽量选择接近的值;
4、正确设置触发通道与触发电平;
5、关闭其他通道(某些型号示波器由于多通道共用单片ADC、存储芯片,在开启多个通道时会降低采样率、存储深度等参数);
6、打开示波器的测量功能,选择电压有效值(RMS-AC)测量;
7、为了对比更明显,设置余辉时间为10s。
下图分别是ZDS2022、T公司的MDO3054(为了带宽一致,已开启250MHz带宽限制)、A公司的MSO-X 3012A测试的基线本底噪声结果。
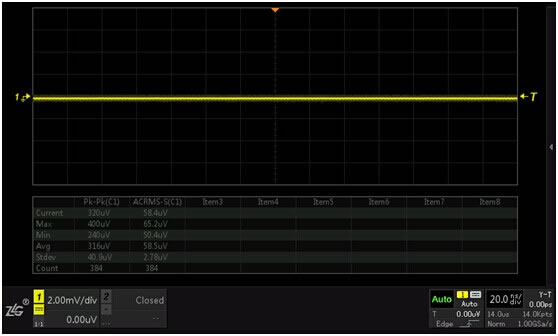
图3 ZDS2022底噪测试
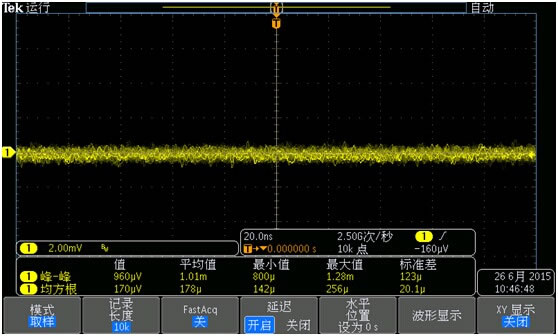
图4 T公司MDO3054底噪测试
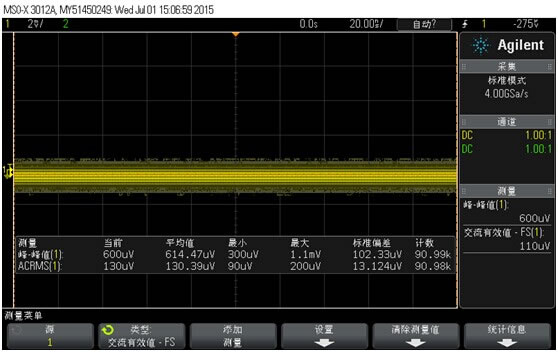
图5 A公司MSO-X 3012A底噪测试
需要注意的是除了带宽以外,以下几项也同样会影响底噪测量结果:
1、时基档位:
不同的时基档位对应的采样率、存储深度、波形刷新率都不同,而且不同的示波器差别也很大。即使使用相同的时基档位,示波器的存储深度等参数还是会有很大差别。
2、耦合方式:
在交流耦合下会使低频噪声受到一定程度的抑制,影响噪声测量结果。而且不同的示波器低频响应不同,对低频噪声抑制也不一样,所以应使用直流耦合评估和比较示波器的底噪。
3、存储深度:
因为噪声固有的随机性,收集的数据越多,测量得到的噪声峰峰值越大。
4、波形刷新率:
波形刷新率越大,屏幕上显示的波形越多,测量得到的噪声峰峰值也越大。
下表是各型号示波器在测量底噪时的各项参数,由以上分析可以发现ZDS2022在相对近似的测试条件下,测试得到的底噪明显优于其他几个厂家。
表1 各型号底噪测试条件

上一篇:ZDS2024 plus示波器MDIO解码/触发实战
下一篇:如何提高示波器测量小信号精度
推荐帖子
- 求IEEE 802.15.4 standard protocol
- 哪位手里有IEEE802.15.4standardprotocol麻烦您帮忙给小弟传一份。非常感谢!邮箱:1523249363@qq.com求IEEE802.15.4standardprotocol
-
liufengjing9
 RF/无线
RF/无线
- 【GD32450I-EVAL】+ 07摄像头全屏显示测试
- 板子上配了一个OV2640摄像头,其最大像素尺寸为1600*1200,板子上的液晶屏的尺寸为480*272,而光盘资料里的照相机例程,只使用了屏幕中间的240*272的一块区域显示摄像头的图像。本篇以资料中的照相机例子为基础,修改程序,测试摄像头在整个屏幕(480*272)上的显示效果,关于屏幕的使用基础,可先参考之前的文章:【GD32450I-EVAL】+04液晶屏层叠显示与透明度调整测试1例子程序分析先看一下例子的效果:1.1
-
DDZZ669
GD32 MCU
- 最小的多模式步进电机控制器及其应用
- 文章介绍了一种步进电机控制电路芯片PH2083及其使用方法。该芯片可控制单极性三/四相和双极性二相步进电机。具有小巧、多种控制模式、使用方便等特点。最小的多模式步进电机控制器及其应用不管好不好,想下下来看看Re:最小的多模式步进电机控制器及其应用
-
frozenviolet
工控电子
- 谁有keil3呀?
- 谁有keil3呀?谁有keil3呀?你可以去www.realview.com.cn下载是免费的不过有代码大小30K的限制!如果找不到我可以传给你!
-
wenchaoge741
嵌入式系统
- 【RISC-V MCU CH32V103测评】驱动OLED屏显示
- OLED屏是一种小巧的显示器件,其面对LCD1602等液晶显示屏也毫不逊色,显示的内容也并不少。此外,它按接口方式可分为I2C接口和SPI接口等,所占用的引脚也不多于LCD1602等。这里选用的是I2C接口的OLED屏,它最有特点,用2个I/O口就能完成显示任务。在掌握GPIO口使用的基础上,就可十分轻松地实现驱动OLED屏显示的目标。这里的OLED屏与MCU的连接关系为:SCL---PA2SD
-
jennyzhaojie
国产芯片交流
- 【2024 DigiKey创意大赛】基于Raspberry Pi 5的三全向轮自动导航小车
- #【2024DigiKey创意大赛】基于RaspberryPi5的三全向轮自动导航小车##一、作品简介###1.1功能介绍:利用RaspberryPi5、激光雷达等硬件,基于ROS系统,完成一款具有路径规划,自主导航的三轮小车。通过传感器技术和智能算法,实现室内外环境的自动导航和避障功能。------------本次项目计划通过软件仿真和实物设计两部分完成:**1、仿真部分:**在ubuntu搭建机器人系统仿真环境,仿真实现涉及的内容主要有:1.1.对机器
-
FFD8
DigiKey得捷技术专区
 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用 MAX4275BHESA-T
MAX4275BHESA-T





- DC2257A,使用 LTM8005 38VIN、38VOUT 升压 LED 驱动器和 40V 开关的演示板
- RH1498M 的典型应用 - 10MHz、6V/us、双轨到轨输入和输出精密 C 负载运算放大器
- TRIAC Crowbar 低压精密可调并联稳压器的典型应用
- STEVAL-IME003V1,STHV748 超声脉冲器 IC 评估板
- IR4302 2CH集成D类音频放大器典型应用
- M41T62 低功耗实时时钟的典型应用
- 使用 ON Semiconductor 的 ADP3171 的参考设计
- EVAL-ADUC7122QSPZ,用于评估 ADuC7122 ARM7 MCU 微转换器 + 13 外部通道、12 位、1MSPS ADC 的 QuickStart Plus 开发系统
- 用于有刷直流电机的桥驱动IC —— TB6642FTG
- ASL5115EVBSLAV: MLC ASL5115SHN评估/开发板












 京公网安备 11010802033920号
京公网安备 11010802033920号