摘要:目前,7种关键技术使GPS进入世界各地的手机,本文详述了这些技术的进入过程以及对未来10年有什么影响。
十年前的E911法案启动了消费型GPS第一个成功的里程碑,自此以后,GPS接收器的灵敏度进步了几乎千倍以上,超过九成(五亿支) 以上的手机已搭配GPS 功能并以主机式GPS(Host-based GPS)为标准。联邦传播委员会(FCC)及美国国会在1999年通过了E911法案,此法案规定当手机使用者拨打911紧急电话时,手机可自动提供通话位置信息。原本,辅助定位系统(A-GPS)只用于移动电话网络与GPS时间同步的时间校对,且主要是用在CDMA的电信网络。而全球最大的电信网络GSM和3G并不与GPS时间同步。所以在早期,一般认为非GPS技术(如现在已被淘汰的增强观测时差E-OTD等技术)会在E911法案中胜出的。然而,正如我们现在所知道的,GPS和全球导航卫星系统(GNSS)成了手机定位系统的大赢家。E911法案是GPS在美国发展的主要动力,并且间接促进了全球GPS的发展。这要归功于以下我所要谈论的七项关键技术,它们使GPS技术在过去多年来逐渐成熟。
关键技术一:辅助定位系统(A-GPS)
关于A-GPS有三件值得记住的事:“更快、更长、更高”。透过奥林匹克运动会的名言“更快、更强、更高”,你就可以记得住了。
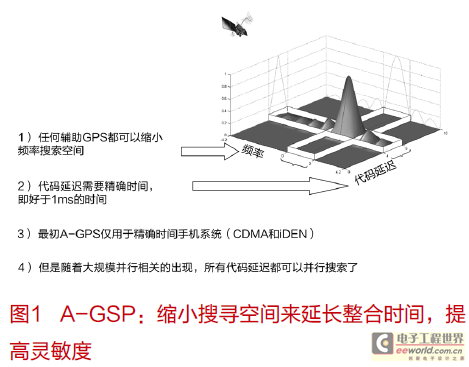
A-GPS最显著的特征,是它使用卫星轨道资料传送替代了原有基站传送相同(或等量)的轨道数据,所以A-GPS接收速度更快。在过去,接收器必须在二维代码/频率空间中,搜索每一个GPS卫星信号。而辅助数据缩减了搜索范围,让装置可以用更长的时间来做信号整合,换句话说,就是敏感度更高了 (见图1)。就是我们说的更长,更高。
现在,我们更进一步来看看代码/频率搜索,并介绍精确校时、粗略校时以及大规模平行关联器等概念。任何辅助数据都可以减少频率搜索次数,频率搜索的概念就是如同你转动车上的收音机旋钮,寻找电台位置。只不过由于卫星移动,会产生不同的GPS频率,也就是多普勒效应。如果你可以预先知道卫星是如何设置的,就可以缩小频率搜寻的范围。
代码延迟(code-delay)就更加敏锐了。C/A 代码的重复周期是1ms,所以如果可以在获得卫星信号之前,就知道比1ms更精确的GPS时间,便可以缩小代码延迟搜索区域,这就是我们所说的“精确校时”。
CDMA通信网络是和GPS的时间同步,而最普遍的通信网络(GSM及目前的3G)则不然。后者与GPS时间有±2秒的误差,我们称之为粗略校时。在最初,只有精确校时的网络可以应用A-GPS,但后来局势改观是因为我们有了关键技术二、关键技术三,那就是大量平行关联器和高灵敏度。
关键技术二、三:大量平行关联器和高敏感度
传统的GPS中,每个频道只有两到三个关联器。他们会搜索代码延迟空间直到可搜索到信号,然后用一组关联器追踪峰值的前端,和用另一组追踪峰值的后端,所以他们被称为“前后关联器”。
大量平行关联器是指,有足够数量的关联器同时在多个频道中,对所有的C/A代码延迟进行搜索。就硬件而言,这意味着有上万个关联器在运作。大量平行关联器的好处是,所有的代码延迟搜索都是平行运作,因此接收器可以用更长的时间来整合信号,即使没有精确对时也无所谓。所以现在接收器可以更快、更长、更高,也就是更高的灵敏度,这不限于我们在何种电信网络中执行A-GPS。在最初,我们认为室内GPS定位会受限于高灵敏度,但发觉使用体积更小、更便宜天线的实际成果却也不差。虽然小而便宜的天线会降低性能表现(我们稍后也会提到),但是它们已被配备在所有的智能型手机上,且被手机厂接受去执行有关A-GPS的功能。

关键技术四:粗略时间导航
我们已经了解,A-GPS辅助不再受限于根据解码轨道数据(所以可以更快),并可以透过大量平行关联器使用粗略对时(所以可以更长的时间做信号整合及提高灵敏度)。然而,要测量精确初估的距离(pseudorange),并计算行进时间,还是需要花时间对卫星所传送的星期时间(Time of Week, TOW)译码,译码后来取得位置进一步可执行导航。粗略校时导航就是要解决一些卫星的TOW问题,而不是直接解码。其关键的技术是依靠在标准导航中的方程式中加入额外状态资料;并于著名的视线矩阵(line-of-sight matrix)中加入相对应的栏位来解决TOW问题。
这个技术的成果就是,你定位所需要的时间,会比解读卫星的星期时间(TOW)(例如一秒、两秒或三秒)还要更快;或是在卫星信号微弱状态下无法解读卫星的星期时间(TOW)时,仍然可以进行实际上的定位。因为你可以有更快的首次定位时间 (FF),无需频繁唤醒接收器来维持热启动状态,因此可延长电池寿命。
关键技术五:时间短TOW
另一个和粗略时间导航技术相提并论的是时间短的卫星TOW解码,也就是降低解读卫星的TOW数据的门坎标准。在1999年,卫星接收的信号强度可让接收器解读卫星的TOW最低标准可达到-142dBm。这是因为当我们在整合信号以20ms为间隔时,可以侦测到-142dBm信号数据位中强度。然而,解读卫星的TOW的技术不断演进,现在最低可接受强度已经降低到-152dBm。
关键技术六、七:主机式全球定位系统(Host-based GPS),RF-CMOS
从传统的系统单芯片(SoC)架构出发,我们就可以清楚地认识主机式架构(Host-based)。SoC GPS通常是单一封装,但封装中包含了三个独立的组件,有三个硅芯片被包在一起:基带(baseband)模块,包含中央处理器 (CPU);分开的无线调频器(RF)以及一个闪存。如果要降低成本,不使用闪存情况下,唯一的方法是改用只读存储器(ROM),它可以包含在基带模块中。然而这也意味着,你将无法可随时更新接收器的软件,来使用我们刚刚讨论的最新发展技术。
相对而言,主机式架构不需要在GPS芯片中有CPU功能。其主因是在智能型手机以及其他含有GPS产品上,其既有的CPU和闪存都能额外提供GPS运算时所需的低功耗。同时, RF-CMOS技术可以让无线调频器和基带同在单一GPS芯片中。此为主机式架构 GPS 特质和优势。
[page]
这一切的结果代表着芯片价格大幅降低,但性能依旧可以维持。

现在已达到我们预期的目标了吗?
A-GPS 技术已经引领我们大步向前。 “从技术水平和消费者市场层面上我们是否已经达到预期的目标了吗?”
一般认为,体积小而便宜的天线会影响质量的表现,但是我要说,一个成本低于4 美元的单一 GPS 芯片,性能超过一个成本19,000 美元的接收器。这听起来简直是自相矛盾,甚至不可思议。但是我们可从首次定位时间、灵敏度和城市精确度(Urban Accuracy)的数据来证实这点。
另一个芯片革命的观点是,我们已经达到GPS 单系统技术开发的高点,难以再往上。然而,还有许多有待解决的问题,特别是城市信号屏障以及室内使用方面。但是这些问题绝不会是由GPS(或是其它个别的系统)可以独自解决的。所以我们可以把下个十年视为“GPS 增值”,单一GPS 的时代很快就会成为昨日黄花。这也不能被解读为GPS 的失败,甚至正好相反。这是因为GPS 单一系统运作得十分好,以至于在过去多年移动电话内附GPS 的销售总量已达5 亿支,基于此销售基础,我们可以大胆将GPS 推展到卫星导航从未涉足过的领域—是因为我们已开始尝试突破单一GPS 的表现瓶颈。
在不久的将来,我们就会看到大量的GPS 增值产品,像是GPS+微机电系统(MEMS)、GPS+(无线网络)Wi-Fi、GPS+网络测量报告(NMR)、GPS+罗盘(Compass)以及GPS+苏联导航卫星系统(GLONASS)、日本准天顶导航卫星系统(QZSS)、欧洲伽利略卫星系统。将来能够进行最大程度整合的公司,就会是赢家。所以,引用丘吉尔的话,目前的状况并不是GPS 的终点,甚至谈不上接近终点;了不起只能算是初阶段的结束。

GPS 消费市场
几年前Len Jacobson 的《GNSS 应用及市场》有一份对2010 年消费市场的预测: Frost & Sullivan 2006 报告预测,在2010 年,PND 及手持装置 (不包括移动电话) 市场会达到 27 亿美元(830 万台,平均售价325美元)。对照实况,目前的市场大约是60亿美元,(4 千万台,平均售价150美元)。简言之,消费市场的规模比几年前所预估的还要大上一倍,还不包括手机市场。虽然价格比预估要低一半,但是出售量是预估的四倍之多。
谈到移动电话,我们回头看看1999 年,那时大家预估A-GPS 只会在精确校时通信网络中被采用(像是CDMA)。如今A-GPS已经大量在全球精确校时以及粗略校时通信网络中被使用,包括欧洲和北美的GSM,以及日本的W-CDMA。最近三年GPS 消费市场,特别是移动电话市场已经大幅成长,置入手机的GPS 接受器数量超过了以往所有GPS 产品数量的总和。而到如今,每年全球民用导航卫星系统(GNSS)接收器产量99%以上的数量皆使用L1-only C/A code GPS 接收器。
所以,从消费市场观点,我们是否已经达到预期的目标?是的!我们不只达到,而且是已经远远超过预期的成绩。接下來,让我们回顾过去十年的技术发展,看看这些技术是否已经达到我们预期的目标。
摩尔定律表明,在一定的晶体管数目下,芯片体积每两年便会缩小一半。摩尔定律在GPS 是适用的,大约每两年,芯片尺寸会缩小一半。2010 年才刚刚开始,人们已经开始在谈论下一代,也就是40 nm的GPS 芯片了。过去二十年来,摩尔定律已经重复了十回,所以同样的芯片在二十年前,尺寸会比现在大上1000 倍。当然不可能会有这么大的芯片,但我要说的是,GPS 芯片并不只是随着摩尔定律变小而已,它还变得更复杂,功能性更强。
最低价GPS性能表现
基本上,GPS 接收器只做三件事:启动、追踪微弱信号、计算定位速度时间和位置。撇开繁琐的细节不谈,主要重点可归纳为:速度、灵敏度和精确度。
从90 年代以来,首次定位时间(TTFF)和灵敏度都有一定程度的进步,这要归功于上述七个关键技术。即使没有精确时间,首次定位时间在辅助冷启动或是未辅助热启动之下,已经可以达到一秒。这比90 年代传统GPS 表现好上45 倍。在灵敏度方面,到1998 年为止,大约有30 倍的进步(达到 -150dBm),2006 年又增进了10 倍(到-160 dBm)。说不定假以时日,我们会拥有1000 倍的灵敏度。那么准确度又是如何呢?
有些低价芯片被当成是低精确度的代名词,不过这并不正确。的确体积小、成本低的天线会降低定位准确度,然而就相同天线而言,在移动电话极为普遍的环境中,现今市场上最低价的GPS 接收器,其性能表现却优于最贵的GPS 接收器。以下图表的数据会说明这一点。
首先,我们连接一个最小、最低价的GPS 接收器,到一个最好的天线上(扼流圈天线),架设到可以清楚看见天空的开阔屋顶上。图2 左侧是定位点散布情形,蓝色圈圈显示了有2000 个定位点,它的中位数值是0.9 公尺。右侧是一个19,000 美元的勘测级专业GPS(Survey-grade GPS)接收器量测的结果,使用的是同样的天线。
勘测级专业(survey-grade) GPS比含GPS 移动电话的精准度表现要好上60cm,或者要说好上三倍也可以,看你要怎么说。但先别急,因为这种测试环境既非典型的消费者情境(在屋顶上架扼流圈天线),也不是我们今日面对的主要挑战。
[page]
接下来,我们要在一个比较典型的使用环境中,看看一般消费型天线的精确度表现如何。图3 显示一个主动式平板天线(就是个人导航设备PND 里面会看到的那种)在圣何塞市区的定位情形。圣何塞是一个典型的美国都市,不算是对GPS 最严峻的挑战,但也不是太容易。城中的街道(Lightstone Alley)只有5 米宽,两侧都是高耸建筑物。
要测量精确度,我们使用实际参照的方法,结合GPS 以及配备环状镭射陀螺仪的战术级惯性测量装置(tactical grade IMU),它可以在图上显示蓝色小点;白色小点是低价GPS 的定位情形。大多数时间白色小点都和蓝色小点重叠,偶而你会看到一些错开的地方,红色线段显示的是水平误差。水平误差的中位数值是4.4 m。

图4 比较了低价及高价的GPS 接收器的表现。当勘测级专业接收器(survey-grade receiver) 接上移动电话使用的平板天线时,出现了很多个定位间距(position gap),而且当汽车不动的时候,定位却仍飘移(在图的左下以及上侧区域,路口的地方)。这是由于城市环境的信号比较微弱。但我们也先别急,因为这也还不是消费型GPS 最严苛的测试:在严峻的都会高楼密集区像是旧金山、纽约、芝加哥、上海、台北、东京新宿之类地区,才是终极挑战。通常在这些地方,最多只能直接接收到一颗或二颗GPS 卫星,也许也可以借着侦测到清楚的反射信号而收到其他卫星系统的卫星信号,但这不是我们常谈到的GPS 多路径效应,那个是“同时有直接信号也有反射信号”,但这里却是“只有反射信号。其他都没了”。GPS 的直接信号通常都会被高耸密集的建筑物遮蔽,而无法被侦测到。因此很难获得良好精确度。
图5并列比较了移动电话上的GPS 以及勘测级专业GPS(survey grade GPS),在安装同样的小型天线后,我们在旧金山金融区做测试。勘测级专业GPS(survey grade GPS)完全无法定位!图6 显示可得信号,并解释了原因。在蒙特马利街(Montgomery Street)上,只有依据直接可得的卫星,信号强度是-132dBm,所有其他的卫星的信号强度都低于-140dBm,传统GPS 是无法获取信号的。要能够在这种严峻的环境中有办法定到位置,我们需要移动电话中具备高灵敏度GPS 接收器。
简言之,低成本的接收器并不会牺牲性能。而且相反地,由于有先前提到的七样关键技术的演进和突破,首次定位时间(TTFF)和灵敏度都有惊人进步;而且定位精准度也没有打折扣,事实上在城市环境中,低成本接收器比起传统接收器,以及新型、动辄上千美元的勘测级专业接收器(survey-grade receiver)却毫不逊色。
我们已经看过GPS 消费市场规模超过了预期,从技术观点来说,答案较不明确。在过去十年,消费型GPS 技术进步简直一日千里。然而精确地来说,由于这些关键技术远远超过早期的预测。但是单独靠GPS 在室内的定位功能却明显不足,理想中,我们要的是让GPS 在室外运作得和室内一样的好(但是目前还无法做到,在现阶段,我们无法在单一GPS 本身技术上有明显的突破来改善室内定位的效果)。我们不会期望单一GPS 的首次定位时间可以进步45 倍,或是灵敏度可以再提升个30dB。然而,我们却会希望借助其它技术的整合,来提高性能。图7 显示的是一个市场上的GPS+MEMS例子,型号是Tomtom14950,使用了博通BCM4750 芯片 (上面实验中所使用的同样芯片)、再加上和MEMS 加速度计以及MEMS 时率陀螺仪的整合,如此,可在旧金山的城市高楼密集区中进行测试时可获得更良好的定位效果(精确度提升了30%,最坏情况误差降低一半多)。测试结果显示方向精确度尤其显著。
图7线条图显示的是在旧金山测试中,对只含有GPS 产品的卫星信号都很差。就单一GPS 來說,定向的角度误差甚至达到45°,这也是使用过只含有GPS 的人,都会遇到的情形:突然之间地图旋转到错误的方向。如果整合了MEMS 时率陀螺仪后,定向的角度误差可缩小到只有3°,和45°误差相比有15 倍的进步。这类似过去十年GPS 发生的各类演进,主要因为有“GPS 加值”。
在未来几年,我们会开始看到许多技术加值到GPS 上面:Wi-Fi、NMR/MRL(GSM 及3G 手机协助定位) ,当然还有GPS+苏联导航卫星系统(GLONASS)、罗盘、日本准天顶卫星系统(QZSS)和欧洲伽利略系统。
举例来说,近年来大多数智能手机、上网本等具有划时代意义的类似产品,都配备GPS 以及Wi-Fi,而且许多配备了3G 网卡,所以如果GPS 科技发展出包含Wi-Fi 及MRL 定位,是再自然不过的事。寻找整合多种无线芯片供货商,也是自然的趋势。毕竟,当有芯片供货商已经为你准备好的时候,你为何还要花功夫自己动手,解决整合不同无线共存的问题呢?
我们展望了下个十年的导航科技,可以说未来的GPS 特色是会加上其它技术。谁有能力把技术整合到最大程度,谁就会是最大的赢家。
 车载娱乐魔方_源代码
车载娱乐魔方_源代码 人工智能机器人学导论 (墨菲)
人工智能机器人学导论 (墨菲) 自然语言处理实战
自然语言处理实战 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用










 京公网安备 11010802033920号
京公网安备 11010802033920号