1 引言
Philips公司的8XC552单片机以其体积小、功能强、价格低等优势而广泛地使用在工业控制、DCS控制和智能仪器等领域。笔者在智能配电监测仪的研制过程中,虽然采取了相应的抗干扰措施,但由于工业现场环境中电磁场、电网尖峰、谐波、浪涌及雷电辐射等影响,仍有可能出现程序死循环、跑飞等失控现象。为此,笔者采用Watchdog技术保证了系统的正常运行,通常Watchdog技术在单片机应用系统中可分为软件Watchdog和硬件Watchdog。Philips公司的8XC552、Intel的8098、Motorala的68C05以及Microchip的16C5X系列单片机本身已带有软件Watchdog功能,因此,只要硬件接法正确,在软件设计中调用相应语句进行启动即可。
2 硬件组成原理
2.1系统工作原理
图1所示是87C522单片机用于智能型配电仪的连接电路,本智能配电仪中的87C552为主控芯片,该芯片除具有三个16位定时器T0、T1及T2外,还有一个专作监视8位定时器、简称WDT(WatchdogTimer)的T3定时器。因为微控制器有时会受噪音、射频干扰等环境因素的影响而导入错误的运行状态。监视定时器的功能就是在某特定的时限内使微控制器复位,从而将其从错误的状态中恢复过来以重新开始正常运行。当T3用作Watchdog定时器并由软件启动计时后,如果系统已达到所设定的预定时间而仍没有重新启动定时器,此时就会产生溢出信号并停止计时,表明系统出现异常。CPU可以对定时器重新启动、清零、设定计时值等操作。系统正常运行时,CPU将周期性地重新启动定时器,当然其启动周期应小于定时器的设定值,以保证定时器始终不能产生溢出信号。而当系统运行不正常时,由于CPU不能周期性地启动定时器,因而定时器将产生溢出信号,以强迫CPU恢复系统的正常运行。

2.2 Watchdog的内部结构原理
监视定时器的结构原理如图2所示。它的核心为一8位定时器,其前级是一个11位定标器。后者的输入信号为fosc/12,即定标器对机器周期进行递增计数。这样,每过2个机器周期,定时器T3的值便增加1000次。若用16MHz或24MHz晶体振荡器,则监视定时器的增值间隔将分别为1.536ms和1.024ms;其相应的最大溢出周期分别为393.216ms和262.144ms。
当监视定时器溢出时,系统将产生一个内部复位脉冲以使8XC552复位。由图2可以看出,T3溢出时,RST引脚内侧的晶体管因栅极出现一个负脉冲而瞬时导通,从而在RST引脚上输出一个复位正脉冲,其宽度为3个机器周期。如果RST引脚外接电容,则这么窄的输出脉冲可能遭到破坏,因为电容不允许RST引脚电压产生突变,但这不会影响到内部复位操作。
如果将8XC552的 引脚接至低电平,则输入信号至定标器的通路将畅通无阻,于是监视定时器便正常运作。但若将引脚接高电平,输入信号则会因与门被封锁而不能通过,这时监视定时器处于关闭状态。应当指出,一旦T3被开启,则无法用软件使之关闭;同时如果T3被EW禁止,也无法用软件启动。
引脚接至低电平,则输入信号至定标器的通路将畅通无阻,于是监视定时器便正常运作。但若将引脚接高电平,输入信号则会因与门被封锁而不能通过,这时监视定时器处于关闭状态。应当指出,一旦T3被开启,则无法用软件使之关闭;同时如果T3被EW禁止,也无法用软件启动。
如果=0,那么PCON寄存器的PD位便不可写入,其初值为0,无法置l,即不可进入掉电方式。故监视定时器和掉电方式两者不可兼得。

3 调试中的常见问题及其解决方法
在对系统进行调试时,有可能出现闪屏、无法显示以及显示杂乱等现象,现将这些问题的解决方法介绍如下:
(1)LCD出现闪屏,无法翻屏显示现象
笔者在用仿真器运行编程时,LCD能够翻屏并不断显示采集来的三相用电参数,但离开仿真器处于脱机运行状态时,LCD只能显示第一屏数据。经查仿真器的![]() 引脚接高电平,而脱机时
引脚接高电平,而脱机时![]() 脚悬空,从而引起了
脚悬空,从而引起了![]() 脚的状态不固定,并不断产生内部复位信号使单片机复位而出现了上述现象。后来把
脚的状态不固定,并不断产生内部复位信号使单片机复位而出现了上述现象。后来把![]() 脚接低电平,仍然出现上述现象。而把
脚接低电平,仍然出现上述现象。而把![]() 脚接高电平后(即禁用Watchdog功能),则LCD显示正常。因此,引脚
脚接高电平后(即禁用Watchdog功能),则LCD显示正常。因此,引脚![]() 应严格禁止悬空以避免出现不稳定的状态,同时在未载入Watchdog程序之前,其引脚
应严格禁止悬空以避免出现不稳定的状态,同时在未载入Watchdog程序之前,其引脚![]() 也不能接低电平。
也不能接低电平。
(2)LCD无显示
RST端的电容应确保连接正确,否则在高电平时将无法加到复位端而使CPU不能运行程序,从而出现LCD无显示的现象。
(3)LCD显示数据杂乱无章、数据死锁
把![]() 脚接低电平,可能会出现LCD显示的数据杂乱无章、数据死锁现象。其原因是源程序中未载入Watchdog程序,因此应保证在源程序中加入Watchdog程序,以消除数据的死锁或显示杂乱无章等问题。
脚接低电平,可能会出现LCD显示的数据杂乱无章、数据死锁现象。其原因是源程序中未载入Watchdog程序,因此应保证在源程序中加入Watchdog程序,以消除数据的死锁或显示杂乱无章等问题。
4 软件设计
4.1软件设计
编写监视定时器运行软件时,程序员首先应当确定系统能够在错误状态下支持的时间,也就是设定溢出周期的依据。例如能维持16ms,则把T3的初值设定为10,这样,在16MHz晶振的情况下,溢出周期为15.36ms。此时程序员就可对其软件进行划分,以确定把重写T3值的指令插在什么地方,才能使相邻两次重写操作间隔不超过监视定时器的溢出周期,以保证正常运作时T3不溢出。因此,程序员应当了解所有软件模块的执行时间,同时也要考虑到出现条件跳转、子程序及内外中断等因素所带来的影响。对于那些很难估算其执行时间的程序段落,应按最坏情况估算。为防止误写,监视定时器值的重写可分两步进行。首先将PCON.4(监视定时器装入允许位WLE)置1,以允许对T3进行写入;第二步向T3写入新值。由图2可知,对T3的写信号同时也会加到WLE的清0端,于是每当T3被写入新值时,WLE位便自动复位。因此,当该值为00H时,溢出间隔最大;而FFH值则对应最小溢出周期。若采用12MHz晶振,这两值则分别为524ms和2ms。最大和最小溢出周期的计算公式分别为:
由于在空闲方式下,监视定时器照常运行。因此,该方式与掉电方式是矛盾的,因为前者需要时钟,后者冻结时钟。故当![]() =0而开启T3工作时,8XC552将无法进入掉电方式,此时向PCON.1写l的操作无效,因而它将保持为0。在软件开发调试的早期阶段,可将引脚
=0而开启T3工作时,8XC552将无法进入掉电方式,此时向PCON.1写l的操作无效,因而它将保持为0。在软件开发调试的早期阶段,可将引脚![]() 接高电平以关闭监视定时器,而在后期改接低电平以完成调试过程。
接高电平以关闭监视定时器,而在后期改接低电平以完成调试过程。
4.2定时间隔和访问时间的设定
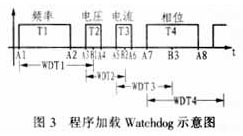
数据采集及处理是程序中的关键部分,也是决定仪器精度的关键所在。本仪器采用电压、电流、频率、相位为主要采集参数,且这些参数是连续变化的,因此采样时间不宜设置得过长,否则会影响仪器的精度。笔者将电流与电压的采样时间定为5ms,频率与相位的采集时间为20ms,这样,Watchdog的定时间隔设置较佳,具体如图3所示。图3中,Watchdog在WDT1时间内完成对采集频率数据的监控,而在WDT2、WDT3、WDT4内分别负责对电压、电流、相位数据采集的监控。在设计程序时,一般取1.1Ts<Tw<2Ts,其中Ts为采样周期,Tw为Watchdog的定时时间,Ts分别为T1、T2、T3、T4的大小,Tw分别为WDT1、WDT2、WDT3、WDT4的大小。Tw设置太小会增加访问频率,影响程序执行效率;而设置太大则会干扰程序的正常运行,且需等待很长时间才可以恢复运行,而采集或控制对象可能已在这一步偏离过大。因此,CPU访问时间原则上小于Tw就可以了,为防止时间估计不准,设计时应小些为好,这样可以防止系统异常而处于每经过Tw时间启动一次的死循环中。
4.3软件程序
本智能监控仪用C语言编写程序,并采用12MHz晶振时,其溢出时间应分别设置为6ms、20ms、524ms…,这样,在源程序中应适时加入的各Watchdog程序如下:
5结束语
在智能配电仪的源程序中加入Watchdog后,其整个系统运行将更加稳定、可靠,从而有效地克服了来自工业用电现场的各种干扰。
上一篇:基于LabVIEW的远程测控方法
下一篇:开关功率放大器的数字控制方案研究
推荐阅读最新更新时间:2024-05-13 18:12

 新能源汽车核心技术详解:电池包 BMS VCU MCU
新能源汽车核心技术详解:电池包 BMS VCU MCU ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉)
ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉) 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南










 京公网安备 11010802033920号
京公网安备 11010802033920号