网络传感器是集传感器技术、嵌入式计算技术、现代网络及通信技术、分布式信息处理技术于一身的资源受限的嵌入式设备,是“普适计算”在微型嵌入式领域的一种重要应用模式。
网络传感器的研究过去一直受限于硬件平台而发展缓慢。随着半导体技术、通信技术、微电子技术和微机械技术的不断进步,低功耗、低价格、多功能的传感器网络系统得到了快速发展,使得制作微小、有弹性、低功耗的传感器节点成为现实。
背景
应用特点
网络传感器应用有其自身的特点,主要有以下几个方面:小尺寸和低功耗、并发密集操作、有限的物理并行性和控制层次、多样化的设计和使用。一方面,传感器资源极其有限,给底层嵌入式程序设计带来较大的限制;另一方面,传感器上运行的应用程序和系统内核通常是紧密结合在一起的,且运行时需要的任务数量、执行时间、执行结果以及内存消耗等是可以较好预计的。
此外,传感器种类繁多,针对不同应用场合需要不同种类的传感器;在军事应用、空间探索等特定应用场合下,更是需要大量的不同种类的传感器协同合作来完成特定应用事件。因而传感器上运行的软件系统如果能够具备相对较好的灵活性、可配置性和可重用性,将能更好地满足应用需求。
现有嵌入式OS比较
当前存在众多的嵌入式操作系统,其中具有代表性的如Vxwork、WindowsCE,pSOS和Neculeus等,它们的优点是:功能强大;具有丰富的API和嵌入式应用软件;具备良好的实时性能,尤以Vxwork为代表;具备良好的稳定性。缺点是:价格昂贵;源代码不公开,以及由此导致的诸如对设备的支持、应用软件的移植等一系列的问题;另外对于传感器器件来说,这些嵌入式OS都显得过于“庞大”了一些。 uc/os和嵌入式Linux当前正获得越来越广泛的应用。
它们的优点是:执行效率高、占用空间小、可扩展性能好,同时是免费且源代码公开的。uc/os具备良好的实时性能,嵌入式Linux的实时性能有待进一步提高。缺点是:它们都是相对通用的嵌入式操作系统,不能完全适应传感器应用领域的需求,如嵌入式Linux最小仍然需要上百K的ROM和RAM空间才能工作,而uc/os的内核尽管可缩减至几K,但是对于某些传感器应用来说,仍然显得不够精简。
UC Berkeley设计开发了无线传感器网络应用的嵌入式操作系统TinyOS以及系统编程语言nesC。我们在剖析现有嵌入式OS特别是TinyOS的基础之上,设计实现了支持网络传感器的微型嵌入式操作系统γOS,并开发了系统编程语言AntC。
γOS设计
γOS是以网络传感器应用为目标的微型嵌入式操作系统,针对网络传感器的前述应用特点,γOS的设计具备几个特性:支持足够微小的硬件系统,便于传感器设备在检测环境中的任意撒布;支持足够低的系统功耗,保证传感器设备具备足够长的生命期;支持集成可与物理世界交互的传感设备,实现数据的采集和传输;同时兼顾适度灵活的可重用性、可配置性。
γOS还必须解决传感器网络的两个突出问题:
1)由于网络传感器操作的并发密集性,因而必须保证众多不同数据流的并发即时传输;
2)系统必须提供高效的模块化管理策略,具体硬件设备和具体应用组件必须紧密地结合在一起,减小处理和存储开销。为此,γOS的设计重点主要集中在以下几个方面:低能耗的微型内核;微线程的系统架构;组件化的功能设计;支持传感通信的接口。
支持低能耗的微型内核
为了降低能耗,γOS设计了一种相对简单的内核机制,它由两部分组成:系统初始化代码以及一个微小的核心调度组件。系统初始化代码具有平台相关性;核心调度组件实现基于优先级的两级调度机制,它分别由两个调度队列组成:事件队列和任务队列。事件队列优先级高于任务队列的优先级,每个队列内部基于FIFO调度机制。
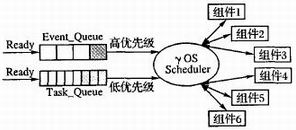
图1 γOS的内核调度示意图
此外,为了降低能耗,在借鉴TinyOS的能耗管理算法的基础之上,设计实现了能耗控制组件:动态电源管理DPM组件和动态电压调整DVS组件。
微线程的系统架构

图2 微线程的系统架构
如图2所示,γOS的通过组件来实现基于事件驱动模式的微线程系统架构,采用事件触发去唤醒相应的功能组件工作。每个功能组件可以由以下几个部分组成:事件处理函数 用以实现对底层硬件中断的处理,如MCU外部中断、定时器中断等,它可以向核心调度组件提交任务,但并不等待任务的执行。事件优先级高,可抢占任务执行,可以传递。它提供了一个简明的方法用于抽象软硬件之间的边界,使得支持硬件中断变得非常简单。
命令
用以执行对底层组件的操作,是非阻塞的,且必须向调用者返回命令执行的结果(成功或失败)。
任务
用于表示组件中计算相对集中的一组操作。任务不具有抢占性,任务与任务之间是原子化的,以先进先出的方式执行,即一个任务必须执行完之后才能执行下一个任务。但任务可以被事件处理函数抢占。
组件状态
用以表示组件当前的工作状态,可以被自己的功能函数或其他组件所参考。
利用微线程的系统架构,γOS可有效降低上下文切换代价;同时,通过引入原子语句来处理任务和事件,甚至事件和事件之间的并发操作,实现微线程异步通讯机制,有效地避免阻塞、轮询和数据资源竞争。
组件化的功能设计
在特定应用场合下,需要大量的不同种类的传感器协同合作来完成特定应用事件,因而传感器上运行的软件系统具备相对较好的灵活性和可配置性。
为此,γOS提供了对组件化的功能设计方式的支持。γOS可分解为一个核心调度组件和若干功能组件。现有的功能组件主要包括:能耗控制组件如动态电源管理 DPM组件和动态电压调整DVS组件,AntIP协议(支持微型嵌入式TCP/IP协议)组件,USB驱动组件,网卡驱动组件和XML分析器组件等。
根据不同应用配置不同的功能组件,以实现特定的目标。γOS支持静态配置和动态加载两种方式。静态配置组件最少可只包括一个核心调度组件,而其他的功能组件可根据相应的应用需求选择预先静态配置方式或者动态加载方式。
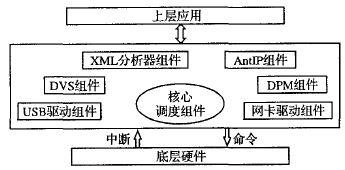
图3 γOS组件示意图
支持传感通信的接口
γOS通过AntIP组件实现对传感器通信的接口支持,主要有支持传感器节点间的对等(Peer-To-Peer)通信和组播通信模式,支持传感器节点与PC间的对等通信模式和支持基于事件的异步通信处理模式。
AntIP是一个适用于8/16位机的微型嵌入式TCP/IP协议栈,它尽管去掉了许多全功能协议栈中不常用的功能,但仍然保留了网络通信所必要的协议机制,支持ARP,IP,ICMP,TCP,UDP等协议,并且提供了简易的应用层接口和设备驱动层接口。AntIP的设计借鉴了uip的设计思想。
典型应用
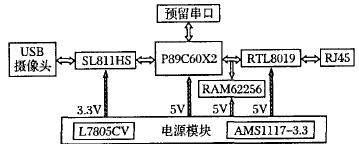
图4 硬件平台示意图
γOS是以网络传感器应用为目标的,它可以运行在多种目标传感器上。我们采用γOS机制,针对图像数据采集方面的应用,设计了一套较典型的网络图像传感器系统。该系统主要由主控模块、存储模块、USBhost模块、以太网模块、摄像头模块和串口模块(预留接口)组成,采用的芯片分别为Philips公司的 P89C60X2(80C51芯片)、USB控制芯片SL811HS、RAM芯片62256和NIC芯片RTL8019AS。
平台部分初始化代码(AntC语言)如下:
useSL811HS
useCamera
useRTL8019
classPlatform
{
publicstaticintInit()
{
RTL8019.Init();
if(SL811HS.UsbInit()==FALSE)
return-1;
if(Camera.CameraInit()==FALSE)
return-1;
if(Camera.CameraStart()==FALSE)
return-1;
AntIP.Init();
return1;
}
publicstaticvoidStart()
{
postAntIP.Run;
}
publicstaticvoidmain()
{
Init();
Start();
}
}
该部分代码做了网卡模块、USB模块以及摄像头模块的初始化工作。
结语
采用γOS的网络图像传感器的各模块的代码量及所需数据空间大小如表1所示。从该表中可看出γOS的核心代码量基本接近TinyOS的核心代码量。
表1 模块代码量与所需数据空间

在这篇文章中,我们简要阐述了网络传感器在普适计算环境下的应用特点,介绍了一个以网络传感器为应用目标的嵌入式操作系统γOS的设计和几个特点,并建立了一个典型应用平台,最后简要给出了γOS在该平台上的性能。
上一篇:AD7888与S3C2410的SPI接口及Linux下嵌入式驱动的实现
下一篇:一种改进型UML在嵌入式系统中的应用
推荐阅读最新更新时间:2024-05-13 21:01

 ICCV2023论文汇总:Document Analysis and Understanding(文档分析与理解)
ICCV2023论文汇总:Document Analysis and Understanding(文档分析与理解) 人工智能算法(卷2)-受大自然启发的算法
人工智能算法(卷2)-受大自然启发的算法 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用





- Power Integrations面向800V汽车应用推出新型宽爬电距离开关IC
- 打破台积电垄断!联电夺下高通先进封装订单
- Ampere 年度展望:2025年重塑IT格局的四大关键趋势
- 存储巨头铠侠正式挂牌上市:首日股价上涨超10%
- Vishay 推出新款精密薄膜MELF电阻,可减少系统元器件数量,节省空间,简化设计并降低成本
- 芯原推出新一代高性能Vitality架构GPU IP系列 支持DirectX 12和先进的计算能力
- NXP 2.5亿美元收购Aviva,但车载SerDes领域依然处于战国时期
- 应对 AI 时代的云工作负载,开发者正加速向 Arm 架构迁移
- 沉浸式体验漫威宇宙,英特尔锐炫显卡为《漫威争锋》提供Day 0支持
- 艾迈斯欧司朗与法雷奥携手革新车辆内饰,打造动态舱内环境




 京公网安备 11010802033920号
京公网安备 11010802033920号