用来实现定位控制的光电技术可提供一种用固定标志点结合线性或旋转运动部件来实现简单可重复运动的方法,这种方法既花钱不多,又便于设计。图 1 所示的简单而又基本的设计能实现顺序位置控制,它利用了与一对光电管并联工作的一个功率运放的快速响应时间。由此实现的一种元件数量很少的系统,能在明确规定的工作环境下,具有很高的可靠性、准确性以及可重复性。图 1 所示电路使用一个功率运放将一对光电管的差分输出组合起来,驱动电动机向适当的方向转动,直至两个光电管电流相等,由此实现顺序位置控制。当你一瞬间将一个固定输入电流切换到放大器的输入端时,使放大器驱动电动机按所需方向转动时就会使电动机在两个标志点之间运动。当未达到标志点而输入电流被切断时,CF上的电荷继续为电动机提供动力。
为确保电动机向所要求方向持续转动,当第一个光电管被照亮时,电动机就接收到该光电管输出产生的增力。当第二个光电管被照亮时,其电流使电动机反转,从而系统锁定在标志点处。使用差分配置可消除由于光电器件的温度不稳性和时间不稳定性所造成的误差。整个系统使用一个简单开关(如图 1 所示)来产生正向和反向两种转动。由于电动机响应时间和系统惯性在不同的应用场合相差很大,你可以根据应用场合选择CF和RF来实现合适的阻尼。CF必须足够小,以使电动机在标志点通过第二个光电管之前实现反转,否则,系统会继续运动到下一个标志点。如果CF的值过小,则会发生严重的过冲或振荡,导致传动系统故障,甚至烧毁电动机。
 图1,光电电路采用一个功率运放来实现顺序位置控制。
为将过冲减到最低程度,图1中的RF1和 RF2将控制环路稳定在增益为1的点。你也可以施加一个制动力来缩短响应时间,方法是用RL和CL建立一个超前网络,使放大器根据传感器输出的变化来修正电动机的驱动。图1中的电动机具有14V的 EMF(电动势),并能在反转时在导通输出晶体管上加上 46V 的电压。这时的功耗是最坏情况下的功耗,你必须对照 SOA(安全工作区)核查这一功耗。图2示出了光束传感器的最佳校准情况。你只要将光束对准每个光电二极管的工作区,就可实现最佳的校准。光束必须照射到每个光电二极管光敏区的一半。当确定“孔”的大小时,要考虑光束位置与光电二极管之间的距离。如果光束过大,传感器在定位范围内不产生任何变化。光束太小则会在光电敏感区之间沿中心线产生一个非线性传送函数。这种非线性使人们难以选择电路阻尼电容器值CF的电容值,而且要求使用亮度更高的光源。
图1,光电电路采用一个功率运放来实现顺序位置控制。
为将过冲减到最低程度,图1中的RF1和 RF2将控制环路稳定在增益为1的点。你也可以施加一个制动力来缩短响应时间,方法是用RL和CL建立一个超前网络,使放大器根据传感器输出的变化来修正电动机的驱动。图1中的电动机具有14V的 EMF(电动势),并能在反转时在导通输出晶体管上加上 46V 的电压。这时的功耗是最坏情况下的功耗,你必须对照 SOA(安全工作区)核查这一功耗。图2示出了光束传感器的最佳校准情况。你只要将光束对准每个光电二极管的工作区,就可实现最佳的校准。光束必须照射到每个光电二极管光敏区的一半。当确定“孔”的大小时,要考虑光束位置与光电二极管之间的距离。如果光束过大,传感器在定位范围内不产生任何变化。光束太小则会在光电敏感区之间沿中心线产生一个非线性传送函数。这种非线性使人们难以选择电路阻尼电容器值CF的电容值,而且要求使用亮度更高的光源。
 图2,在光束-传感器最佳对准的情况下,光束照射到每个二极管光敏区的一半。
图3显示了在不使用数模变换的情况下,如何将一个非双极信号用于集成有数字控制的系统。当逻辑线路为低电平时,信号二极管不导通。这一条件允许光电二极管对电路进行控制。Line2上的高电平使电流流入求和点,并使放大器摆动到负电平。Line1上的高电平使求和点电平高于地电平,并使放大器摆动到正电平。只要选择一个能使逻辑电平高得足以由每个光电二极管提供至少2倍的最大电流的电阻值,该电路就可保持对系统的控制,而不管光电二极管的信号如何。
图2,在光束-传感器最佳对准的情况下,光束照射到每个二极管光敏区的一半。
图3显示了在不使用数模变换的情况下,如何将一个非双极信号用于集成有数字控制的系统。当逻辑线路为低电平时,信号二极管不导通。这一条件允许光电二极管对电路进行控制。Line2上的高电平使电流流入求和点,并使放大器摆动到负电平。Line1上的高电平使求和点电平高于地电平,并使放大器摆动到正电平。只要选择一个能使逻辑电平高得足以由每个光电二极管提供至少2倍的最大电流的电阻值,该电路就可保持对系统的控制,而不管光电二极管的信号如何。
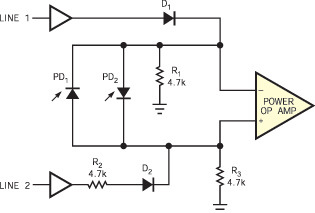 图3,本电路将数字控制信号分配给图1所示电路。
图3,本电路将数字控制信号分配给图1所示电路。
引用地址:简化电动机运动的光电定位控制电路
图1,光电电路采用一个功率运放来实现顺序位置控制。
为将过冲减到最低程度,图1中的RF1和 RF2将控制环路稳定在增益为1的点。你也可以施加一个制动力来缩短响应时间,方法是用RL和CL建立一个超前网络,使放大器根据传感器输出的变化来修正电动机的驱动。图1中的电动机具有14V的 EMF(电动势),并能在反转时在导通输出晶体管上加上 46V 的电压。这时的功耗是最坏情况下的功耗,你必须对照 SOA(安全工作区)核查这一功耗。图2示出了光束传感器的最佳校准情况。你只要将光束对准每个光电二极管的工作区,就可实现最佳的校准。光束必须照射到每个光电二极管光敏区的一半。当确定“孔”的大小时,要考虑光束位置与光电二极管之间的距离。如果光束过大,传感器在定位范围内不产生任何变化。光束太小则会在光电敏感区之间沿中心线产生一个非线性传送函数。这种非线性使人们难以选择电路阻尼电容器值CF的电容值,而且要求使用亮度更高的光源。
图2,在光束-传感器最佳对准的情况下,光束照射到每个二极管光敏区的一半。
图3显示了在不使用数模变换的情况下,如何将一个非双极信号用于集成有数字控制的系统。当逻辑线路为低电平时,信号二极管不导通。这一条件允许光电二极管对电路进行控制。Line2上的高电平使电流流入求和点,并使放大器摆动到负电平。Line1上的高电平使求和点电平高于地电平,并使放大器摆动到正电平。只要选择一个能使逻辑电平高得足以由每个光电二极管提供至少2倍的最大电流的电阻值,该电路就可保持对系统的控制,而不管光电二极管的信号如何。
图3,本电路将数字控制信号分配给图1所示电路。
上一篇:新型LCD视频驱动器
下一篇:内含标准字库的中文液晶模块OCMJ5X10
 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用 LTC6910-2HTS8#TRPBF
LTC6910-2HTS8#TRPBF
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
- 是德感恩月:有奖征文免费送示波器啦!
- 5G来袭 TE Connectivity 助你抢占消费电子市场先机
- 【有奖直播】 聚焦语音识别核心技术,走进Microchip Timberwolf™音频处理器研讨会
- 免费测评|ESP32-S2-Kaluga-1新型多媒体开发板,灵活拆装,满足多种需求
- 抢先体验:TI MSPM0L1306 LaunchPad开发套件,赢三模无线键盘
- 是德科技推出新的8通道示波器 点击获取报价
- 解锁【W5500-EVB-Pico】,探秘以太网底层,得捷Follow me第4期来袭!
- 6小时狂欢,谁是2016年TI杯全国大学生物联网设计竞赛最高人气王,你说了算!
- 如何利用WEBENCH快速设计?
11月14日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号