摘要:和异步机的各种控直接转矩控制目前已经应用到同步机制系统中,由于其采用BangBang控制,长控制周期将导致大电流和大的转矩脉动这两个突出问题,要使控制性能更为优越必然对控制周期提出更高的要求。提高控制平台性能是解决这些问题的有效途径之一。TI公司的2000系列DSP是电机控制领域常用芯片,针对电机控制设计的事件管理器具有突出优点。3X系列DSP则是性价比很好的通用芯片,浮点运算,数据处理速度快。为此采用双DSP系统结构,从电机控制领域特点出发,利用TMS320LF2407A控制上的强大功能而专注于控制方面的工作;TMS320VC33浮点运算能力强,则进行数据的分析和处理。使用双口RAMCY7C025实现双机之间的高速数据交流和通信,使得不同MDSP优势充分体现,协同工作,大大提高控制平台的性能。
关键词:电机控制;直接转矩控制;双DSP;双端口RAM;通信
引言
直接转矩控制[1]是目前广为研究的电机控制理论之一,已在异步机上取得了成功,而在同步机方面的应用也已有了一定发展[2]。由于该理论直接对转矩进行控制,故瞬态性能得到了显著的改善。但是,由于其采用的是BangBang控制,控制周期过长会使电流过大;同时大周期会使转矩脉动加大。为了解决这个问题可以从控制策略上加以改进,比如采用SVMDTC[3]来取代传统DTC方案;也可以在控制平台上加以考虑,提高处理器速度,缩短控制周期。以单个DSP为核心的控制平台(常见的芯片如TI公司的2000系列),由于既要完成复杂的算法,还要执行数据采集、控制信号输出、系统保护以及人机交互等一系列操作,无法有效地缩短控制周期。在综合考虑了各种数字信号处理器的性能之后,决定采用双DSP并行工作的体系结构;并同时考虑到该控制系统的特点,即在每个控制周期内两个DSP之间交换的信息很少,不同于诸如图像采集系统[4]那样,需要大流量的数据交换。由此采取了一系列特殊的设计思想。首先,在芯片的选型上兼顾了各自不同的特点,即专用于电机控制领域的芯片TMS320LF2407A专注于控制;高速通用数据处理芯片TMS320VC33则着眼于复杂算法的实现,从而充分利用了各自的特点。其次,针对电机控制这一特定领域,需要采集的数据相对较少,同时反馈的也只是计算结果,即PWM波发送策略,并无大量中间结果,因此,需要考虑的重点是控制方法的实现,和数据采集的实现必须占用尽可能少的资源。同时由于数据量较少,可以用较小的代价来实现数据的冗余,使得数据处理时更加灵活和方便,DSP之间并不一定保持同步工作状态。为了实现两个DSP之间的数据交换和通信,选择了双口RAM作为两者之间的媒介。并从硬件和软件上相互配合,避免存储空间争用[5]的同时,使得数据存储过程尽量少耗费各种资源。
 1 硬件系统构成
TMS320LF2407A最突出的特点在于其事件管理器模块:共有两个事件管理器EVA及EVB,提供了8个16位脉宽调制(PWM)通道。这些都是针对电机控制而设计的,在PWM波的产生上相当方便可靠;可编程的PWM死区控制可以防止上下桥臂同时输出触发脉冲而导致直通。同时每个模块还提供了两个外部引脚PDPINTA和PDPINTB,当该引脚上出现低电平时事件管理器模块将快速关闭相应的PWM通道,起到保护作用。片内模数转换模块为数据采集提供了高性能的A/D转换器,最小转换时间只有500ns。由于转换时间是整个控制周期的组成部分之一,快速A/D对于缩短控制周期是非常有利的。
TMS320C3X系列DSP芯片是一种性能价格比很好的浮点处理芯片,具有很高的数据处理速度。片内部分拥有34K%26;#215;32位的RAM,在程序运行期间,所有的数据都位于其中,从而能够充分发挥哈佛总线结构所带来的数据吞吐量大、运算快的优点。在算法实现上,由于采用了浮点计算格式,将使计算精度得到提高;采用编程语言C会使程序编写效率大大改善,这对于需要用复杂算法实现的控制策略来说是很重要的。
双口RAM的特点在于具有两组相互独立的地址线、数据线和控制线,片内包含的控制逻辑解决了三个重要的问题:处理器之间的信号关系(中断逻辑);两个CPU正在使用同一地址时的时间关系(仲裁逻辑)和把一块存储器临时分配到某一边的硬件支持(旗语逻辑),从而保证双机之间数据、信号交流的正确进行。
1 硬件系统构成
TMS320LF2407A最突出的特点在于其事件管理器模块:共有两个事件管理器EVA及EVB,提供了8个16位脉宽调制(PWM)通道。这些都是针对电机控制而设计的,在PWM波的产生上相当方便可靠;可编程的PWM死区控制可以防止上下桥臂同时输出触发脉冲而导致直通。同时每个模块还提供了两个外部引脚PDPINTA和PDPINTB,当该引脚上出现低电平时事件管理器模块将快速关闭相应的PWM通道,起到保护作用。片内模数转换模块为数据采集提供了高性能的A/D转换器,最小转换时间只有500ns。由于转换时间是整个控制周期的组成部分之一,快速A/D对于缩短控制周期是非常有利的。
TMS320C3X系列DSP芯片是一种性能价格比很好的浮点处理芯片,具有很高的数据处理速度。片内部分拥有34K%26;#215;32位的RAM,在程序运行期间,所有的数据都位于其中,从而能够充分发挥哈佛总线结构所带来的数据吞吐量大、运算快的优点。在算法实现上,由于采用了浮点计算格式,将使计算精度得到提高;采用编程语言C会使程序编写效率大大改善,这对于需要用复杂算法实现的控制策略来说是很重要的。
双口RAM的特点在于具有两组相互独立的地址线、数据线和控制线,片内包含的控制逻辑解决了三个重要的问题:处理器之间的信号关系(中断逻辑);两个CPU正在使用同一地址时的时间关系(仲裁逻辑)和把一块存储器临时分配到某一边的硬件支持(旗语逻辑),从而保证双机之间数据、信号交流的正确进行。
 仲裁逻辑(忙逻辑)每块CY7C025允许两个CPU同时读取任何存储单元(包括同时读同一地址单元),但是不允许同时写或者一读一写同一地址单元,否则就会发生错误。双口RAM中已经有相应的仲裁逻辑电路来解决这一问题:先行稳定的地址端口通过仲裁逻辑电路优先读写,同时内部电路使另一个端口的BUSY信号有效,并在内部禁止对方访问,直到本端口的操作结束。BUSY信号可以作为CPURDY信号的来源,从而使得CPU处于等待状态。
当双口RAM单片使用的时候,问题相对简单,但是,在现代数字系统中,由于数据总线的宽度往往可以达到32位甚至更宽,这就需要多片双口RAM来进行位扩展。此时如果出现同时访问,将有多块双口RAM处于工作状态,如果依然象单片工作时那样,每块双口RAM都使用自己的仲裁逻辑,则很可能出现一种情况,即第一片仲裁使得BUSYL变低,而第二片仲裁使BUSYR变低,这样两边的CPU都会处于等待状态。为了避免这种情况的发生(BUSY信号死锁),可以使用主从模式,使得当多块芯片一起工作时,只使用主片的仲裁逻辑,并迫使从片跟随主片。主从模式的电路连接如图1所示。
主芯片的BUSY信号接上拉电阻作为输出,从芯片的BUSY信号作为写禁止输入,当主芯片处于BUSY状态时,从芯片接收这个状态,同样处于忙状态,从而避免了死锁的发生。
中断逻辑另一个重要的内部电路结构,它允许双CPU通过端口直接进行通信。CY7C025最高位的存储单元1FFF作为右边端口的中断信箱,次高位存储单元1FFE作为左边端口的中断信箱。各CPU可以读取双方的中断信箱,但只能写对方的中断信箱。当一端写入对方的中断信箱时,对方就会产生一个中断信号;读自己的中断信箱则清除自己的中断信号,读对方的中断信箱不会清除中断信号。
仲裁逻辑(忙逻辑)每块CY7C025允许两个CPU同时读取任何存储单元(包括同时读同一地址单元),但是不允许同时写或者一读一写同一地址单元,否则就会发生错误。双口RAM中已经有相应的仲裁逻辑电路来解决这一问题:先行稳定的地址端口通过仲裁逻辑电路优先读写,同时内部电路使另一个端口的BUSY信号有效,并在内部禁止对方访问,直到本端口的操作结束。BUSY信号可以作为CPURDY信号的来源,从而使得CPU处于等待状态。
当双口RAM单片使用的时候,问题相对简单,但是,在现代数字系统中,由于数据总线的宽度往往可以达到32位甚至更宽,这就需要多片双口RAM来进行位扩展。此时如果出现同时访问,将有多块双口RAM处于工作状态,如果依然象单片工作时那样,每块双口RAM都使用自己的仲裁逻辑,则很可能出现一种情况,即第一片仲裁使得BUSYL变低,而第二片仲裁使BUSYR变低,这样两边的CPU都会处于等待状态。为了避免这种情况的发生(BUSY信号死锁),可以使用主从模式,使得当多块芯片一起工作时,只使用主片的仲裁逻辑,并迫使从片跟随主片。主从模式的电路连接如图1所示。
主芯片的BUSY信号接上拉电阻作为输出,从芯片的BUSY信号作为写禁止输入,当主芯片处于BUSY状态时,从芯片接收这个状态,同样处于忙状态,从而避免了死锁的发生。
中断逻辑另一个重要的内部电路结构,它允许双CPU通过端口直接进行通信。CY7C025最高位的存储单元1FFF作为右边端口的中断信箱,次高位存储单元1FFE作为左边端口的中断信箱。各CPU可以读取双方的中断信箱,但只能写对方的中断信箱。当一端写入对方的中断信箱时,对方就会产生一个中断信号;读自己的中断信箱则清除自己的中断信号,读对方的中断信箱不会清除中断信号。
 旗语通信逻辑可以使双口RAM暂时指定一块存储区,只供一端的CPU使用,称之为独占模式。CY7C025配置了独立于RAM阵列的8个旗语锁存器,用于标志双口RAM是否处于独占模式。独占模式也可以用来避免地址仲裁问题,因为,它是一种使两边不同时使用同一地址的方法,通常也叫做软件仲裁。
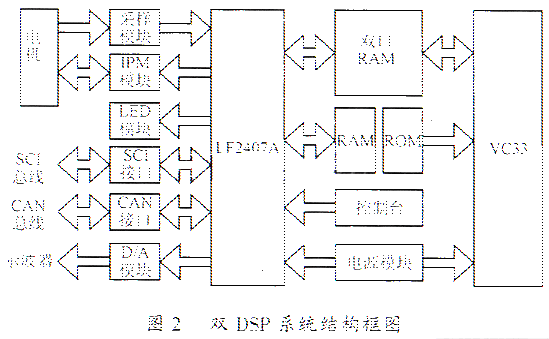
控制平台结构框图如图2所示。
电机由IPM来驱动,霍尔元件检测相关物理量,通过信号调理电路给A/D转换器,转换结果由LF2407A存储于双口RAM中,并由VC33读取用于计算。调理的同时保护电路也进行相应的检测,在意外状况发生时随时切断触发信号。VC33将获取的数据进行分析和计算,所有的数据处理都由VC33完成,只将计算结果反馈给LF2407A,并由此产生相应的控制信号,通过接口电路来控制IPM工作。同时预留了D/A及串口输出等相关外围电路,用于实现显示、检测、与其它系统通信等各项功能。LF2407A和VC33优势互补,并行工作,控制周期的长短主要取决于算法实现时间。原有的控制软件(以C32为控制平台)需要100μs左右,在采用了新的控制平台后,整个控制周期减小到20μs左右。
2 双端口RAM存储争用解决方案
在双机的数据交流过程中,存在存储空间争用问题,常见的解决方案有如下几种。
——硬件方案最简单的方法就是上面提到的使用双口RAM内部的仲裁逻辑,要求两边的CPU都具有RDY引脚,从而插入相应的等待周期。对于8098单片机,DSP都具有这样的资源,而且只需要硬件支持,相对简单。如果不具备RDY引脚,如8031单片机,则不能采用此种方法。
旗语通信逻辑可以使双口RAM暂时指定一块存储区,只供一端的CPU使用,称之为独占模式。CY7C025配置了独立于RAM阵列的8个旗语锁存器,用于标志双口RAM是否处于独占模式。独占模式也可以用来避免地址仲裁问题,因为,它是一种使两边不同时使用同一地址的方法,通常也叫做软件仲裁。
控制平台结构框图如图2所示。
电机由IPM来驱动,霍尔元件检测相关物理量,通过信号调理电路给A/D转换器,转换结果由LF2407A存储于双口RAM中,并由VC33读取用于计算。调理的同时保护电路也进行相应的检测,在意外状况发生时随时切断触发信号。VC33将获取的数据进行分析和计算,所有的数据处理都由VC33完成,只将计算结果反馈给LF2407A,并由此产生相应的控制信号,通过接口电路来控制IPM工作。同时预留了D/A及串口输出等相关外围电路,用于实现显示、检测、与其它系统通信等各项功能。LF2407A和VC33优势互补,并行工作,控制周期的长短主要取决于算法实现时间。原有的控制软件(以C32为控制平台)需要100μs左右,在采用了新的控制平台后,整个控制周期减小到20μs左右。
2 双端口RAM存储争用解决方案
在双机的数据交流过程中,存在存储空间争用问题,常见的解决方案有如下几种。
——硬件方案最简单的方法就是上面提到的使用双口RAM内部的仲裁逻辑,要求两边的CPU都具有RDY引脚,从而插入相应的等待周期。对于8098单片机,DSP都具有这样的资源,而且只需要硬件支持,相对简单。如果不具备RDY引脚,如8031单片机,则不能采用此种方法。
 ——中断方案需要硬件和软件的同时支持。将双口RAM的左右中断信号输出引脚和CPU的外部中断输入引脚相连,并编写相应的中断子程序。
——旗语方案同样需要硬件和软件的同时支持,我们也称之为软件仲裁。其步骤为申请独占区域、判断申请是否成功、释放独占区域。由于两边不同时使用同一地址,所以也可以避免争用的发生。
本系统设计时综合了各种情况最后选用了硬件方案。这是因为使用中断方案软件编写复杂,频繁中断跳转在算法和控制都较复杂的情况下,对于软件的可靠性和稳定性是不利的;采用旗语方案则控制相对复杂一些;硬件方案具有简单可靠的特点,存储空间的争用完全由硬件解决,即当发生存储空间争用的时候,决定先行稳定的端口优先进行访问,另一端口则插入等待周期。由于DSP的快速性,不同于以往的单片机将产生很长的等待周期。针对本系统考虑,即使是最坏的情况:每个控制周期内传递数据8个,LF2407A一次读/写周期50ns记,共需要0.4μs。当然这完全由硬件来实现,若考虑软件上共同配合,则可以更有效地减少等待时间。而且0.4μs和20μs的控制周期相比,所占的比重非常小,并不会给系统性能带来显著影响,系统可靠性和稳定性也能够得到保证。这也正是本系统的特点所在。
3 TMS320C2407A/TMS320VC33与
CY7C025之间通信的实现
LF2407A的数据总线宽度和地址总线宽度都是16位,单片CY7C025就足够了。VC33的数据总线宽度是32位,可以采用两片CY7C025以主从模式进行宽度扩展(见图3),这样每次VC33读取数据时就能一次读入两个LF2407A的采样数据。也可以采用单片CY7C025,虽然没有完全利用VC33的数据宽度,但是,从电路设计上来讲相对简洁。由于本系统双口RAM的作用主要是起到数据传递的作用,不需要保存大量的中间结果以及已经使用过的数据,因此,需要的存储空间不是很大,单片双口RAM就已经足够。具体的接口电路见图3,片选等控制信号由译码电路产生。
地址空间分配综合了不同DSP的空间资源分配要求,具体见表1。
表1 地址空间分配表
起始地址
终止地址
LF2407A
0X8000H
0X9FFFH
VC33
010000H
011FFFH
4 软件功能实现
双DSP协同工作的关键是相互通信和数据交流上的密切配合,可通过硬件仲裁电路来完成这一任务。但是如果仅仅用硬件完成,如上分析,毕竟等待时间还要0.4μs左右。如果辅以软件配合,则可以有效地减少等待产生的情况。
——中断方案需要硬件和软件的同时支持。将双口RAM的左右中断信号输出引脚和CPU的外部中断输入引脚相连,并编写相应的中断子程序。
——旗语方案同样需要硬件和软件的同时支持,我们也称之为软件仲裁。其步骤为申请独占区域、判断申请是否成功、释放独占区域。由于两边不同时使用同一地址,所以也可以避免争用的发生。
本系统设计时综合了各种情况最后选用了硬件方案。这是因为使用中断方案软件编写复杂,频繁中断跳转在算法和控制都较复杂的情况下,对于软件的可靠性和稳定性是不利的;采用旗语方案则控制相对复杂一些;硬件方案具有简单可靠的特点,存储空间的争用完全由硬件解决,即当发生存储空间争用的时候,决定先行稳定的端口优先进行访问,另一端口则插入等待周期。由于DSP的快速性,不同于以往的单片机将产生很长的等待周期。针对本系统考虑,即使是最坏的情况:每个控制周期内传递数据8个,LF2407A一次读/写周期50ns记,共需要0.4μs。当然这完全由硬件来实现,若考虑软件上共同配合,则可以更有效地减少等待时间。而且0.4μs和20μs的控制周期相比,所占的比重非常小,并不会给系统性能带来显著影响,系统可靠性和稳定性也能够得到保证。这也正是本系统的特点所在。
3 TMS320C2407A/TMS320VC33与
CY7C025之间通信的实现
LF2407A的数据总线宽度和地址总线宽度都是16位,单片CY7C025就足够了。VC33的数据总线宽度是32位,可以采用两片CY7C025以主从模式进行宽度扩展(见图3),这样每次VC33读取数据时就能一次读入两个LF2407A的采样数据。也可以采用单片CY7C025,虽然没有完全利用VC33的数据宽度,但是,从电路设计上来讲相对简洁。由于本系统双口RAM的作用主要是起到数据传递的作用,不需要保存大量的中间结果以及已经使用过的数据,因此,需要的存储空间不是很大,单片双口RAM就已经足够。具体的接口电路见图3,片选等控制信号由译码电路产生。
地址空间分配综合了不同DSP的空间资源分配要求,具体见表1。
表1 地址空间分配表
起始地址
终止地址
LF2407A
0X8000H
0X9FFFH
VC33
010000H
011FFFH
4 软件功能实现
双DSP协同工作的关键是相互通信和数据交流上的密切配合,可通过硬件仲裁电路来完成这一任务。但是如果仅仅用硬件完成,如上分析,毕竟等待时间还要0.4μs左右。如果辅以软件配合,则可以有效地减少等待产生的情况。
 首先,冲突可能发生在同时写同一个存储单元。在数据写的时候采用如下措施可以避免这种情况的发生:如图4所示,将读/写的存储空间独立开来,显然LF2407A和VC33在写的时候就不可能产生冲突,避免了等待的发生。
其次,冲突可能发生在一读一写同一存储单元的情况下。以LF2407A写数据,VC33读数据为例,上面分析的产生0.4μs等待时间的情况是基于如下假设:将8个数据依顺序存储于同一地址单元。即LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,此后LF2407A将第二个数据覆盖前一个数据存储,依次类推得出的结果就是8%26;#215;50ns=400ns。
事实是我们有足够的地址空间用来存储每批数据,将8个数据按顺序存放在不同的地址空间,此时的情况如下:LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,与此同时LF2407A也开始写第二个数据于下一个存储单元中。两者同时进行,我们只要保证VC33读完的时候,LF2407A第二个数据已经写完,则不会有冲突发生。针对本例,由于两者时间不同(LF2407A为50ns,VC33为13.3ns),VC33读得较快,只要在软件编写上增加40ns左右的循环,就能保证如上的要求。当读/写反过来的时候,则不存在这样的情况而能顺利配合。这样,最终的结果是只增加50ns的等待周期,对于本系统完全可以接受。
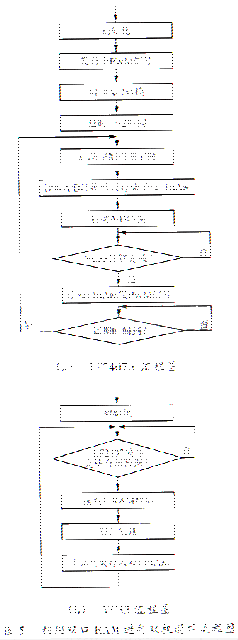
由于两个DSP并不同步工作,所以,LF2407A可以采样尽可能多的数据并保存,VC33只选用最新的数据用于计算,这样就能保证数据的冗余。程序流程如图5所示。
5 结语
双DSP控制系统综合利用了TMS320LF2407A和TMS320VC33芯片的优势和特长,两者在控制和计算上分工明确,并行工作。利用双口RAM实现数据和信息的交流的时候,针对电机控制系统采样数据相对较少的特点,从硬件和软件上相互配合,在解决存储空间争用的同时,很好地解决了等待时间等资源的浪费,也避免了数据交换时利用中断造成的软件不稳定。实现了两者之间的协调工作,大大缩短了控制周期,提高了控制平台的性能。对于低电感同步电机直接转矩控制时,由于控制周期过长而引起电流上升过大的问题能很好地加以解决,同时也使转矩脉动明显减小。
首先,冲突可能发生在同时写同一个存储单元。在数据写的时候采用如下措施可以避免这种情况的发生:如图4所示,将读/写的存储空间独立开来,显然LF2407A和VC33在写的时候就不可能产生冲突,避免了等待的发生。
其次,冲突可能发生在一读一写同一存储单元的情况下。以LF2407A写数据,VC33读数据为例,上面分析的产生0.4μs等待时间的情况是基于如下假设:将8个数据依顺序存储于同一地址单元。即LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,此后LF2407A将第二个数据覆盖前一个数据存储,依次类推得出的结果就是8%26;#215;50ns=400ns。
事实是我们有足够的地址空间用来存储每批数据,将8个数据按顺序存放在不同的地址空间,此时的情况如下:LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,与此同时LF2407A也开始写第二个数据于下一个存储单元中。两者同时进行,我们只要保证VC33读完的时候,LF2407A第二个数据已经写完,则不会有冲突发生。针对本例,由于两者时间不同(LF2407A为50ns,VC33为13.3ns),VC33读得较快,只要在软件编写上增加40ns左右的循环,就能保证如上的要求。当读/写反过来的时候,则不存在这样的情况而能顺利配合。这样,最终的结果是只增加50ns的等待周期,对于本系统完全可以接受。
由于两个DSP并不同步工作,所以,LF2407A可以采样尽可能多的数据并保存,VC33只选用最新的数据用于计算,这样就能保证数据的冗余。程序流程如图5所示。
5 结语
双DSP控制系统综合利用了TMS320LF2407A和TMS320VC33芯片的优势和特长,两者在控制和计算上分工明确,并行工作。利用双口RAM实现数据和信息的交流的时候,针对电机控制系统采样数据相对较少的特点,从硬件和软件上相互配合,在解决存储空间争用的同时,很好地解决了等待时间等资源的浪费,也避免了数据交换时利用中断造成的软件不稳定。实现了两者之间的协调工作,大大缩短了控制周期,提高了控制平台的性能。对于低电感同步电机直接转矩控制时,由于控制周期过长而引起电流上升过大的问题能很好地加以解决,同时也使转矩脉动明显减小。
引用地址:双DSP电机控制数字平台设计
1 硬件系统构成
TMS320LF2407A最突出的特点在于其事件管理器模块:共有两个事件管理器EVA及EVB,提供了8个16位脉宽调制(PWM)通道。这些都是针对电机控制而设计的,在PWM波的产生上相当方便可靠;可编程的PWM死区控制可以防止上下桥臂同时输出触发脉冲而导致直通。同时每个模块还提供了两个外部引脚PDPINTA和PDPINTB,当该引脚上出现低电平时事件管理器模块将快速关闭相应的PWM通道,起到保护作用。片内模数转换模块为数据采集提供了高性能的A/D转换器,最小转换时间只有500ns。由于转换时间是整个控制周期的组成部分之一,快速A/D对于缩短控制周期是非常有利的。
TMS320C3X系列DSP芯片是一种性能价格比很好的浮点处理芯片,具有很高的数据处理速度。片内部分拥有34K%26;#215;32位的RAM,在程序运行期间,所有的数据都位于其中,从而能够充分发挥哈佛总线结构所带来的数据吞吐量大、运算快的优点。在算法实现上,由于采用了浮点计算格式,将使计算精度得到提高;采用编程语言C会使程序编写效率大大改善,这对于需要用复杂算法实现的控制策略来说是很重要的。
双口RAM的特点在于具有两组相互独立的地址线、数据线和控制线,片内包含的控制逻辑解决了三个重要的问题:处理器之间的信号关系(中断逻辑);两个CPU正在使用同一地址时的时间关系(仲裁逻辑)和把一块存储器临时分配到某一边的硬件支持(旗语逻辑),从而保证双机之间数据、信号交流的正确进行。
仲裁逻辑(忙逻辑)每块CY7C025允许两个CPU同时读取任何存储单元(包括同时读同一地址单元),但是不允许同时写或者一读一写同一地址单元,否则就会发生错误。双口RAM中已经有相应的仲裁逻辑电路来解决这一问题:先行稳定的地址端口通过仲裁逻辑电路优先读写,同时内部电路使另一个端口的BUSY信号有效,并在内部禁止对方访问,直到本端口的操作结束。BUSY信号可以作为CPURDY信号的来源,从而使得CPU处于等待状态。
当双口RAM单片使用的时候,问题相对简单,但是,在现代数字系统中,由于数据总线的宽度往往可以达到32位甚至更宽,这就需要多片双口RAM来进行位扩展。此时如果出现同时访问,将有多块双口RAM处于工作状态,如果依然象单片工作时那样,每块双口RAM都使用自己的仲裁逻辑,则很可能出现一种情况,即第一片仲裁使得BUSYL变低,而第二片仲裁使BUSYR变低,这样两边的CPU都会处于等待状态。为了避免这种情况的发生(BUSY信号死锁),可以使用主从模式,使得当多块芯片一起工作时,只使用主片的仲裁逻辑,并迫使从片跟随主片。主从模式的电路连接如图1所示。
主芯片的BUSY信号接上拉电阻作为输出,从芯片的BUSY信号作为写禁止输入,当主芯片处于BUSY状态时,从芯片接收这个状态,同样处于忙状态,从而避免了死锁的发生。
中断逻辑另一个重要的内部电路结构,它允许双CPU通过端口直接进行通信。CY7C025最高位的存储单元1FFF作为右边端口的中断信箱,次高位存储单元1FFE作为左边端口的中断信箱。各CPU可以读取双方的中断信箱,但只能写对方的中断信箱。当一端写入对方的中断信箱时,对方就会产生一个中断信号;读自己的中断信箱则清除自己的中断信号,读对方的中断信箱不会清除中断信号。
旗语通信逻辑可以使双口RAM暂时指定一块存储区,只供一端的CPU使用,称之为独占模式。CY7C025配置了独立于RAM阵列的8个旗语锁存器,用于标志双口RAM是否处于独占模式。独占模式也可以用来避免地址仲裁问题,因为,它是一种使两边不同时使用同一地址的方法,通常也叫做软件仲裁。
控制平台结构框图如图2所示。
电机由IPM来驱动,霍尔元件检测相关物理量,通过信号调理电路给A/D转换器,转换结果由LF2407A存储于双口RAM中,并由VC33读取用于计算。调理的同时保护电路也进行相应的检测,在意外状况发生时随时切断触发信号。VC33将获取的数据进行分析和计算,所有的数据处理都由VC33完成,只将计算结果反馈给LF2407A,并由此产生相应的控制信号,通过接口电路来控制IPM工作。同时预留了D/A及串口输出等相关外围电路,用于实现显示、检测、与其它系统通信等各项功能。LF2407A和VC33优势互补,并行工作,控制周期的长短主要取决于算法实现时间。原有的控制软件(以C32为控制平台)需要100μs左右,在采用了新的控制平台后,整个控制周期减小到20μs左右。
2 双端口RAM存储争用解决方案
在双机的数据交流过程中,存在存储空间争用问题,常见的解决方案有如下几种。
——硬件方案最简单的方法就是上面提到的使用双口RAM内部的仲裁逻辑,要求两边的CPU都具有RDY引脚,从而插入相应的等待周期。对于8098单片机,DSP都具有这样的资源,而且只需要硬件支持,相对简单。如果不具备RDY引脚,如8031单片机,则不能采用此种方法。
——中断方案需要硬件和软件的同时支持。将双口RAM的左右中断信号输出引脚和CPU的外部中断输入引脚相连,并编写相应的中断子程序。
——旗语方案同样需要硬件和软件的同时支持,我们也称之为软件仲裁。其步骤为申请独占区域、判断申请是否成功、释放独占区域。由于两边不同时使用同一地址,所以也可以避免争用的发生。
本系统设计时综合了各种情况最后选用了硬件方案。这是因为使用中断方案软件编写复杂,频繁中断跳转在算法和控制都较复杂的情况下,对于软件的可靠性和稳定性是不利的;采用旗语方案则控制相对复杂一些;硬件方案具有简单可靠的特点,存储空间的争用完全由硬件解决,即当发生存储空间争用的时候,决定先行稳定的端口优先进行访问,另一端口则插入等待周期。由于DSP的快速性,不同于以往的单片机将产生很长的等待周期。针对本系统考虑,即使是最坏的情况:每个控制周期内传递数据8个,LF2407A一次读/写周期50ns记,共需要0.4μs。当然这完全由硬件来实现,若考虑软件上共同配合,则可以更有效地减少等待时间。而且0.4μs和20μs的控制周期相比,所占的比重非常小,并不会给系统性能带来显著影响,系统可靠性和稳定性也能够得到保证。这也正是本系统的特点所在。
3 TMS320C2407A/TMS320VC33与
CY7C025之间通信的实现
LF2407A的数据总线宽度和地址总线宽度都是16位,单片CY7C025就足够了。VC33的数据总线宽度是32位,可以采用两片CY7C025以主从模式进行宽度扩展(见图3),这样每次VC33读取数据时就能一次读入两个LF2407A的采样数据。也可以采用单片CY7C025,虽然没有完全利用VC33的数据宽度,但是,从电路设计上来讲相对简洁。由于本系统双口RAM的作用主要是起到数据传递的作用,不需要保存大量的中间结果以及已经使用过的数据,因此,需要的存储空间不是很大,单片双口RAM就已经足够。具体的接口电路见图3,片选等控制信号由译码电路产生。
地址空间分配综合了不同DSP的空间资源分配要求,具体见表1。
表1 地址空间分配表
起始地址
终止地址
LF2407A
0X8000H
0X9FFFH
VC33
010000H
011FFFH
4 软件功能实现
双DSP协同工作的关键是相互通信和数据交流上的密切配合,可通过硬件仲裁电路来完成这一任务。但是如果仅仅用硬件完成,如上分析,毕竟等待时间还要0.4μs左右。如果辅以软件配合,则可以有效地减少等待产生的情况。
首先,冲突可能发生在同时写同一个存储单元。在数据写的时候采用如下措施可以避免这种情况的发生:如图4所示,将读/写的存储空间独立开来,显然LF2407A和VC33在写的时候就不可能产生冲突,避免了等待的发生。
其次,冲突可能发生在一读一写同一存储单元的情况下。以LF2407A写数据,VC33读数据为例,上面分析的产生0.4μs等待时间的情况是基于如下假设:将8个数据依顺序存储于同一地址单元。即LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,此后LF2407A将第二个数据覆盖前一个数据存储,依次类推得出的结果就是8%26;#215;50ns=400ns。
事实是我们有足够的地址空间用来存储每批数据,将8个数据按顺序存放在不同的地址空间,此时的情况如下:LF2407A存第一个数据时发生冲突,VC33产生等待时间50ns,等待结束VC33读数据,与此同时LF2407A也开始写第二个数据于下一个存储单元中。两者同时进行,我们只要保证VC33读完的时候,LF2407A第二个数据已经写完,则不会有冲突发生。针对本例,由于两者时间不同(LF2407A为50ns,VC33为13.3ns),VC33读得较快,只要在软件编写上增加40ns左右的循环,就能保证如上的要求。当读/写反过来的时候,则不存在这样的情况而能顺利配合。这样,最终的结果是只增加50ns的等待周期,对于本系统完全可以接受。
由于两个DSP并不同步工作,所以,LF2407A可以采样尽可能多的数据并保存,VC33只选用最新的数据用于计算,这样就能保证数据的冗余。程序流程如图5所示。
5 结语
双DSP控制系统综合利用了TMS320LF2407A和TMS320VC33芯片的优势和特长,两者在控制和计算上分工明确,并行工作。利用双口RAM实现数据和信息的交流的时候,针对电机控制系统采样数据相对较少的特点,从硬件和软件上相互配合,在解决存储空间争用的同时,很好地解决了等待时间等资源的浪费,也避免了数据交换时利用中断造成的软件不稳定。实现了两者之间的协调工作,大大缩短了控制周期,提高了控制平台的性能。对于低电感同步电机直接转矩控制时,由于控制周期过长而引起电流上升过大的问题能很好地加以解决,同时也使转矩脉动明显减小。
上一篇:抗电磁干扰的PWM风扇控制器
下一篇:变频家电——效率和节能的典范
 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练 IL610-1ETR13
IL610-1ETR13










 京公网安备 11010802033920号
京公网安备 11010802033920号