摘要:介绍了一种基于谐波补偿的逆变器波形控制技术,分析了系统的工作原理,详细探讨了控制系统参数设计方法,并得出了试验结果。
关键词:谐波补偿;逆变器;波形控制
引言
逆变器是一种重要的DC/AC变换装置。衡量其性能的一个重要指标是输出电压波形质量,一个好的逆变器,它的输出电压波形应该尽量接近正弦,
 总谐波畸变率(THD)应该尽量小。在实际应用中逆变器经常需要接整流型负载,在这种情况下仅仅采用SPWM调制技术的逆变器,其输出电压波形就会产生很大的畸变。
为了得到THD小的输出电压,波形控制技术近年来得到了极大的发展。重复控制[1]是近年来研究得比较多的一种控制方案。本文从谐波补偿的角度出发,采用改进型FFT算法对输出电压误差信号进行实时频谱分析,把由软件算法产生的经过预畸变的谐波信号注入逆变器,由此达到抑制非线性扰动从而校正输出电压波形的目的。
1 控制系统结构及工作原理分析
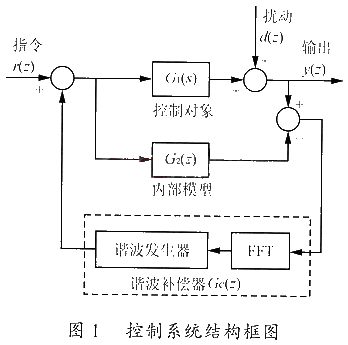
图1为控制系统结构框图[2]。G1(s)表示控制对象,在这里就是输出LC滤波器的传递函数,其离散化形式由G1(z)表示。G2(z)表示内部模型,它与G1(z)相等。
1.1 扰动抑制原理
考虑扰动信号d(z)在输出点的响应。由图1可以很容易得到扰动信号的传函
Hd(z)=1-{[Gc(z)G1(z)]/1+[G1(z)-G2(z)]Gc(z)} (1)
由于G1(z)=G2(z),故Hd(z)可简化为
Hd(z)=1-Gc(z)G1(z) (2)
显然,只要Gc(z)=G1-1(z),则Hd(z)=0,即扰动可以得到完全的抑制。
不幸的是,实际逆变器的z域传递函数含有一个纯延时环节,这就意味着谐波补偿器Gc(z)必须含有一个超前环节,这在物理上是无法实现的。但在实际应用中我们只须抑制低次谐波就可以获得较好的输出电压波形,所以,只需要使谐波补偿器低频段频率特性是控制对象G1(s)低频段频率特性的逆就可以了。而这是很容易做到的,本文把这种低频段频率特性意义上的逆称为“等效逆”。
1.2 内部模型
内部模型G2(z)就等于G1(s)的离散化形式G1(z),它的作用就是模拟控制对象的特性,作为参考信号源。在实际系统中,内部模型作为整个数字控制系统的一部分,由DSP软件算法实现。
1.3 谐波补偿器
谐波补偿器由FFT和谐波发生器组成。FFT算法对输出电压误差进行实时频谱分析,因为,逆变器接整流型负载,其输出电压畸变主要是由于在输出端叠加了次数较低的奇次谐波,所以,只须分析出1,3,5,7,9次谐波的幅值和初相位就可以满足要求。
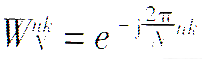
设x(n)为N点有限长序列,其FFT为
总谐波畸变率(THD)应该尽量小。在实际应用中逆变器经常需要接整流型负载,在这种情况下仅仅采用SPWM调制技术的逆变器,其输出电压波形就会产生很大的畸变。
为了得到THD小的输出电压,波形控制技术近年来得到了极大的发展。重复控制[1]是近年来研究得比较多的一种控制方案。本文从谐波补偿的角度出发,采用改进型FFT算法对输出电压误差信号进行实时频谱分析,把由软件算法产生的经过预畸变的谐波信号注入逆变器,由此达到抑制非线性扰动从而校正输出电压波形的目的。
1 控制系统结构及工作原理分析
图1为控制系统结构框图[2]。G1(s)表示控制对象,在这里就是输出LC滤波器的传递函数,其离散化形式由G1(z)表示。G2(z)表示内部模型,它与G1(z)相等。
1.1 扰动抑制原理
考虑扰动信号d(z)在输出点的响应。由图1可以很容易得到扰动信号的传函
Hd(z)=1-{[Gc(z)G1(z)]/1+[G1(z)-G2(z)]Gc(z)} (1)
由于G1(z)=G2(z),故Hd(z)可简化为
Hd(z)=1-Gc(z)G1(z) (2)
显然,只要Gc(z)=G1-1(z),则Hd(z)=0,即扰动可以得到完全的抑制。
不幸的是,实际逆变器的z域传递函数含有一个纯延时环节,这就意味着谐波补偿器Gc(z)必须含有一个超前环节,这在物理上是无法实现的。但在实际应用中我们只须抑制低次谐波就可以获得较好的输出电压波形,所以,只需要使谐波补偿器低频段频率特性是控制对象G1(s)低频段频率特性的逆就可以了。而这是很容易做到的,本文把这种低频段频率特性意义上的逆称为“等效逆”。
1.2 内部模型
内部模型G2(z)就等于G1(s)的离散化形式G1(z),它的作用就是模拟控制对象的特性,作为参考信号源。在实际系统中,内部模型作为整个数字控制系统的一部分,由DSP软件算法实现。
1.3 谐波补偿器
谐波补偿器由FFT和谐波发生器组成。FFT算法对输出电压误差进行实时频谱分析,因为,逆变器接整流型负载,其输出电压畸变主要是由于在输出端叠加了次数较低的奇次谐波,所以,只须分析出1,3,5,7,9次谐波的幅值和初相位就可以满足要求。
设x(n)为N点有限长序列,其FFT为
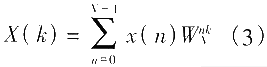 式中:k=0,1,…,N-1;
式中:k=0,1,…,N-1;
 显然,常规的FFT算法,其输出点数和输入点
数是相等的,但在本系统中只须求出X(1),X(3),
X(5),X(7),X(9)等5个输出点,其他输出点是不须计算的。根据基于FFT的蝶形计算流程图[3]可以知道,在只须计算指定的若干个输出点的情况下,可以大大减少计算量,节省大量的DSP时钟,这就使得在计算能力并不强大的F240定点DSP上,实现基于FFT算法的实时频谱分析成为了可能。本文把这种经过化简的算法称为改进型FFT算法。
谐波发生器的作用是把FFT分析出的谐波进行预畸变,然后把预畸变的谐波信号作为补偿指令送给控制对象。之所以要对谐波进行预畸变,是因为控制对象对谐波的跟踪是有差的,这就导致谐波信号通过被控对象到达扰动注入点时,并不与扰动信号形状相同,而是相位正好相差180%26;#176;的信号,这样就无法很好地抵消扰动。谐波发生器的预畸变算法表达式如下:
显然,常规的FFT算法,其输出点数和输入点
数是相等的,但在本系统中只须求出X(1),X(3),
X(5),X(7),X(9)等5个输出点,其他输出点是不须计算的。根据基于FFT的蝶形计算流程图[3]可以知道,在只须计算指定的若干个输出点的情况下,可以大大减少计算量,节省大量的DSP时钟,这就使得在计算能力并不强大的F240定点DSP上,实现基于FFT算法的实时频谱分析成为了可能。本文把这种经过化简的算法称为改进型FFT算法。
谐波发生器的作用是把FFT分析出的谐波进行预畸变,然后把预畸变的谐波信号作为补偿指令送给控制对象。之所以要对谐波进行预畸变,是因为控制对象对谐波的跟踪是有差的,这就导致谐波信号通过被控对象到达扰动注入点时,并不与扰动信号形状相同,而是相位正好相差180%26;#176;的信号,这样就无法很好地抵消扰动。谐波发生器的预畸变算法表达式如下:
 式中:|X(n)|为谐波幅值;
pha(n)为谐波的初相位,它们由FFT算法计算得到;
modcoeff(n)为幅值补偿系数;
phacoeff(n)为相位补偿系数。
式(4)为单次谐波的补偿指令计算式,式(5)为系统需要补偿的所有谐波的总补偿指令计算式,它是各单次谐波补偿指令的简单累加。
式中:|X(n)|为谐波幅值;
pha(n)为谐波的初相位,它们由FFT算法计算得到;
modcoeff(n)为幅值补偿系数;
phacoeff(n)为相位补偿系数。
式(4)为单次谐波的补偿指令计算式,式(5)为系统需要补偿的所有谐波的总补偿指令计算式,它是各单次谐波补偿指令的简单累加。
 幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)可以通过控制对象的幅频、相频特性根据“等效逆”的原则简单地确定。具体来说,modcoeff(n)就是幅频特性频率对应点读数的倒数,phacoeff(n)就是相频特性频率对应点读数的负数。可以看出,谐波补偿器补偿系数的确定是非常简单的,这是本文所用控制方案的一大优点。
2 控制系统参数设计
2.1 FFT采样频率fs和分析窗长度L的确定[4]
采用FFT算法进行实时频谱分析,采样频率fs和分析窗长度L的确定是非常重要的。假设所需要分析信号的最高频率为fmax。根据香农采样定律,只须满足
fs≥2fmax(6)
就可以使被分析信号在频域中不产生混叠。在这里,基波是50Hz,最高只需要分析到9次谐波,所以fmax=450Hz。为了留有一定的裕量,在实际系统中fs取1.6kHz。
幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)可以通过控制对象的幅频、相频特性根据“等效逆”的原则简单地确定。具体来说,modcoeff(n)就是幅频特性频率对应点读数的倒数,phacoeff(n)就是相频特性频率对应点读数的负数。可以看出,谐波补偿器补偿系数的确定是非常简单的,这是本文所用控制方案的一大优点。
2 控制系统参数设计
2.1 FFT采样频率fs和分析窗长度L的确定[4]
采用FFT算法进行实时频谱分析,采样频率fs和分析窗长度L的确定是非常重要的。假设所需要分析信号的最高频率为fmax。根据香农采样定律,只须满足
fs≥2fmax(6)
就可以使被分析信号在频域中不产生混叠。在这里,基波是50Hz,最高只需要分析到9次谐波,所以fmax=450Hz。为了留有一定的裕量,在实际系统中fs取1.6kHz。
 分析窗长度L对于周期信号的频谱分析也是极其重要的,一般都把L取为被分析信号周期的整数倍,否则,会造成严重的频谱泄漏,大大降低频谱分析精度。显然,实际系统中被分析的误差电压信号周期就是基波周期,即为0.02s。所以就把L取为0.02s(即为周期的一倍)。
根据FFT的输入数据点数N的计算式:N=fs%26;#215;L,以及采样频率fs和分析窗长度L的取值,
可以得到N=32。这就是说,本控制系统须做32点的FFT。
分析窗长度L对于周期信号的频谱分析也是极其重要的,一般都把L取为被分析信号周期的整数倍,否则,会造成严重的频谱泄漏,大大降低频谱分析精度。显然,实际系统中被分析的误差电压信号周期就是基波周期,即为0.02s。所以就把L取为0.02s(即为周期的一倍)。
根据FFT的输入数据点数N的计算式:N=fs%26;#215;L,以及采样频率fs和分析窗长度L的取值,
可以得到N=32。这就是说,本控制系统须做32点的FFT。
 2.2 幅值补偿系数和相位补偿系数的确定
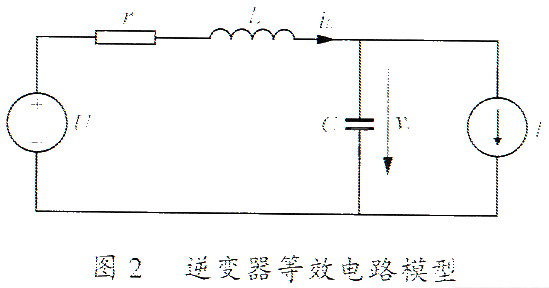
在图2中,电压源U代表来自逆变桥的输出电压,电感L和电容C构成输出LC滤波器,电流源I代表负载汲取的电流,与滤波电感L串联的电阻r是滤波电感的等效串联电阻。由图2可知,在把逆变桥看作一个比例环节的情况下,逆变器的数学模型就是由输出LC滤波器构成的二阶系统。在本系统中,L=0.552mH,r=0.3Ω,C=135μF,所以逆变器数学模型为
G1(s)=3663 2/(s2+2%26;#215;0.074%26;#215;3663s+3663 2) (7)
它的离散化表达式为
G1(z)=(0.1007z+0.09845)/(z2 -1.735z+0.9343) (8)
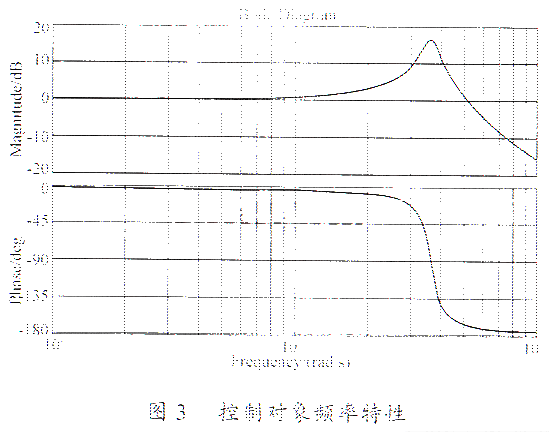
根据图3,可以很方便地得到幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)。表1给出了最终的取值。
表1 补偿系数的取值
波次
幅值补偿系数(放大倍数)
相位补偿系数(角度)
基波
0.993
0.7
3次谐波
0.934
2.3
5次谐波
0.818
4.5
7次谐波
0.643
7.9
9次谐波
0.417
15.7
3 实验结果
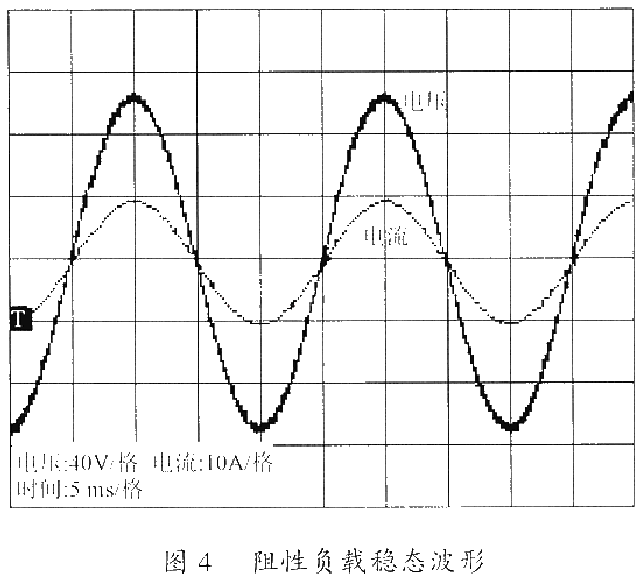
对本文所用的控制方案进行了实验,逆变器参数为L=0.552mH,r=0.3Ω,C=135μF,开关频率f=8kHz,输出频率50Hz,幅值110V的交流电压。采用一片TI的TMS320F240定点DSP实现所有的控制功能。阻性负载参数为R=11Ω。整流型负载参数为L=0.8mH,C=2460μF,R=27Ω。
实验波形如图4,图5和图6所示。
2.2 幅值补偿系数和相位补偿系数的确定
在图2中,电压源U代表来自逆变桥的输出电压,电感L和电容C构成输出LC滤波器,电流源I代表负载汲取的电流,与滤波电感L串联的电阻r是滤波电感的等效串联电阻。由图2可知,在把逆变桥看作一个比例环节的情况下,逆变器的数学模型就是由输出LC滤波器构成的二阶系统。在本系统中,L=0.552mH,r=0.3Ω,C=135μF,所以逆变器数学模型为
G1(s)=3663 2/(s2+2%26;#215;0.074%26;#215;3663s+3663 2) (7)
它的离散化表达式为
G1(z)=(0.1007z+0.09845)/(z2 -1.735z+0.9343) (8)
根据图3,可以很方便地得到幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)。表1给出了最终的取值。
表1 补偿系数的取值
波次
幅值补偿系数(放大倍数)
相位补偿系数(角度)
基波
0.993
0.7
3次谐波
0.934
2.3
5次谐波
0.818
4.5
7次谐波
0.643
7.9
9次谐波
0.417
15.7
3 实验结果
对本文所用的控制方案进行了实验,逆变器参数为L=0.552mH,r=0.3Ω,C=135μF,开关频率f=8kHz,输出频率50Hz,幅值110V的交流电压。采用一片TI的TMS320F240定点DSP实现所有的控制功能。阻性负载参数为R=11Ω。整流型负载参数为L=0.8mH,C=2460μF,R=27Ω。
实验波形如图4,图5和图6所示。
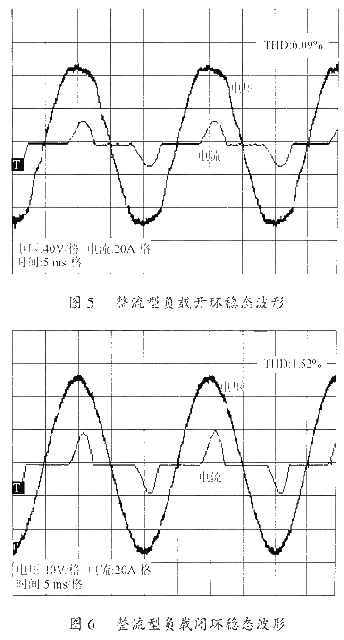 图4给出了逆变器接阻性负载的稳态输出电压和电流波形。图5及图6分别给出了逆变器在接整流型负载情况下开环稳态、闭环稳态的实验波形。可以看出开环情况下输出电压波形畸变严重,闭环以后输出电压波形有了极大的改善。
4 结语
本文采用了一种与重复控制不同的波形控制方案。实验结果表明,本文采用的改进型FFT算法大大减少了计算量,保证了在F240定点DSP上实现实时频谱分析,并且整个控制系统拥有较好的稳态性能。这说明本文采用的控制方案在理论上是正确的,实践上是可行的。而且,这种基于谐波补偿思想的控制技术还有谐波补偿器补偿系数设计简单的优点。总之,该控制方案具有较好的性能,还有一些独特的优点,有一定的实用价值。
图4给出了逆变器接阻性负载的稳态输出电压和电流波形。图5及图6分别给出了逆变器在接整流型负载情况下开环稳态、闭环稳态的实验波形。可以看出开环情况下输出电压波形畸变严重,闭环以后输出电压波形有了极大的改善。
4 结语
本文采用了一种与重复控制不同的波形控制方案。实验结果表明,本文采用的改进型FFT算法大大减少了计算量,保证了在F240定点DSP上实现实时频谱分析,并且整个控制系统拥有较好的稳态性能。这说明本文采用的控制方案在理论上是正确的,实践上是可行的。而且,这种基于谐波补偿思想的控制技术还有谐波补偿器补偿系数设计简单的优点。总之,该控制方案具有较好的性能,还有一些独特的优点,有一定的实用价值。
引用地址:基于谐波补偿的逆变器波形控制技术研究
总谐波畸变率(THD)应该尽量小。在实际应用中逆变器经常需要接整流型负载,在这种情况下仅仅采用SPWM调制技术的逆变器,其输出电压波形就会产生很大的畸变。
为了得到THD小的输出电压,波形控制技术近年来得到了极大的发展。重复控制[1]是近年来研究得比较多的一种控制方案。本文从谐波补偿的角度出发,采用改进型FFT算法对输出电压误差信号进行实时频谱分析,把由软件算法产生的经过预畸变的谐波信号注入逆变器,由此达到抑制非线性扰动从而校正输出电压波形的目的。
1 控制系统结构及工作原理分析
图1为控制系统结构框图[2]。G1(s)表示控制对象,在这里就是输出LC滤波器的传递函数,其离散化形式由G1(z)表示。G2(z)表示内部模型,它与G1(z)相等。
1.1 扰动抑制原理
考虑扰动信号d(z)在输出点的响应。由图1可以很容易得到扰动信号的传函
Hd(z)=1-{[Gc(z)G1(z)]/1+[G1(z)-G2(z)]Gc(z)} (1)
由于G1(z)=G2(z),故Hd(z)可简化为
Hd(z)=1-Gc(z)G1(z) (2)
显然,只要Gc(z)=G1-1(z),则Hd(z)=0,即扰动可以得到完全的抑制。
不幸的是,实际逆变器的z域传递函数含有一个纯延时环节,这就意味着谐波补偿器Gc(z)必须含有一个超前环节,这在物理上是无法实现的。但在实际应用中我们只须抑制低次谐波就可以获得较好的输出电压波形,所以,只需要使谐波补偿器低频段频率特性是控制对象G1(s)低频段频率特性的逆就可以了。而这是很容易做到的,本文把这种低频段频率特性意义上的逆称为“等效逆”。
1.2 内部模型
内部模型G2(z)就等于G1(s)的离散化形式G1(z),它的作用就是模拟控制对象的特性,作为参考信号源。在实际系统中,内部模型作为整个数字控制系统的一部分,由DSP软件算法实现。
1.3 谐波补偿器
谐波补偿器由FFT和谐波发生器组成。FFT算法对输出电压误差进行实时频谱分析,因为,逆变器接整流型负载,其输出电压畸变主要是由于在输出端叠加了次数较低的奇次谐波,所以,只须分析出1,3,5,7,9次谐波的幅值和初相位就可以满足要求。
设x(n)为N点有限长序列,其FFT为
式中:k=0,1,…,N-1;
显然,常规的FFT算法,其输出点数和输入点
数是相等的,但在本系统中只须求出X(1),X(3),
X(5),X(7),X(9)等5个输出点,其他输出点是不须计算的。根据基于FFT的蝶形计算流程图[3]可以知道,在只须计算指定的若干个输出点的情况下,可以大大减少计算量,节省大量的DSP时钟,这就使得在计算能力并不强大的F240定点DSP上,实现基于FFT算法的实时频谱分析成为了可能。本文把这种经过化简的算法称为改进型FFT算法。
谐波发生器的作用是把FFT分析出的谐波进行预畸变,然后把预畸变的谐波信号作为补偿指令送给控制对象。之所以要对谐波进行预畸变,是因为控制对象对谐波的跟踪是有差的,这就导致谐波信号通过被控对象到达扰动注入点时,并不与扰动信号形状相同,而是相位正好相差180%26;#176;的信号,这样就无法很好地抵消扰动。谐波发生器的预畸变算法表达式如下:
式中:|X(n)|为谐波幅值;
pha(n)为谐波的初相位,它们由FFT算法计算得到;
modcoeff(n)为幅值补偿系数;
phacoeff(n)为相位补偿系数。
式(4)为单次谐波的补偿指令计算式,式(5)为系统需要补偿的所有谐波的总补偿指令计算式,它是各单次谐波补偿指令的简单累加。
幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)可以通过控制对象的幅频、相频特性根据“等效逆”的原则简单地确定。具体来说,modcoeff(n)就是幅频特性频率对应点读数的倒数,phacoeff(n)就是相频特性频率对应点读数的负数。可以看出,谐波补偿器补偿系数的确定是非常简单的,这是本文所用控制方案的一大优点。
2 控制系统参数设计
2.1 FFT采样频率fs和分析窗长度L的确定[4]
采用FFT算法进行实时频谱分析,采样频率fs和分析窗长度L的确定是非常重要的。假设所需要分析信号的最高频率为fmax。根据香农采样定律,只须满足
fs≥2fmax(6)
就可以使被分析信号在频域中不产生混叠。在这里,基波是50Hz,最高只需要分析到9次谐波,所以fmax=450Hz。为了留有一定的裕量,在实际系统中fs取1.6kHz。
分析窗长度L对于周期信号的频谱分析也是极其重要的,一般都把L取为被分析信号周期的整数倍,否则,会造成严重的频谱泄漏,大大降低频谱分析精度。显然,实际系统中被分析的误差电压信号周期就是基波周期,即为0.02s。所以就把L取为0.02s(即为周期的一倍)。
根据FFT的输入数据点数N的计算式:N=fs%26;#215;L,以及采样频率fs和分析窗长度L的取值,
可以得到N=32。这就是说,本控制系统须做32点的FFT。
2.2 幅值补偿系数和相位补偿系数的确定
在图2中,电压源U代表来自逆变桥的输出电压,电感L和电容C构成输出LC滤波器,电流源I代表负载汲取的电流,与滤波电感L串联的电阻r是滤波电感的等效串联电阻。由图2可知,在把逆变桥看作一个比例环节的情况下,逆变器的数学模型就是由输出LC滤波器构成的二阶系统。在本系统中,L=0.552mH,r=0.3Ω,C=135μF,所以逆变器数学模型为
G1(s)=3663 2/(s2+2%26;#215;0.074%26;#215;3663s+3663 2) (7)
它的离散化表达式为
G1(z)=(0.1007z+0.09845)/(z2 -1.735z+0.9343) (8)
根据图3,可以很方便地得到幅值补偿系数modcoeff(n)和相位补偿系数phacoeff(n)。表1给出了最终的取值。
表1 补偿系数的取值
波次
幅值补偿系数(放大倍数)
相位补偿系数(角度)
基波
0.993
0.7
3次谐波
0.934
2.3
5次谐波
0.818
4.5
7次谐波
0.643
7.9
9次谐波
0.417
15.7
3 实验结果
对本文所用的控制方案进行了实验,逆变器参数为L=0.552mH,r=0.3Ω,C=135μF,开关频率f=8kHz,输出频率50Hz,幅值110V的交流电压。采用一片TI的TMS320F240定点DSP实现所有的控制功能。阻性负载参数为R=11Ω。整流型负载参数为L=0.8mH,C=2460μF,R=27Ω。
实验波形如图4,图5和图6所示。
图4给出了逆变器接阻性负载的稳态输出电压和电流波形。图5及图6分别给出了逆变器在接整流型负载情况下开环稳态、闭环稳态的实验波形。可以看出开环情况下输出电压波形畸变严重,闭环以后输出电压波形有了极大的改善。
4 结语
本文采用了一种与重复控制不同的波形控制方案。实验结果表明,本文采用的改进型FFT算法大大减少了计算量,保证了在F240定点DSP上实现实时频谱分析,并且整个控制系统拥有较好的稳态性能。这说明本文采用的控制方案在理论上是正确的,实践上是可行的。而且,这种基于谐波补偿思想的控制技术还有谐波补偿器补偿系数设计简单的优点。总之,该控制方案具有较好的性能,还有一些独特的优点,有一定的实用价值。
上一篇:高噪声情况下蓄电池剩余容量在线检测方法的改进
下一篇:CPLD在航空1l5V/400Hz高频链逆变电源中的应用
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 EL2044CN
EL2044CN
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
- 芯启源(上海)将持续发力,“做深做精”EDA及IP产品
- 本田严厉警告日产:若与鸿海合作,那么本田与日产的合作将终止
- Microchip推出新款交钥匙电容式触摸控制器产品 MTCH2120
- Matter对AIoT的意义:连接AIoT设备开发人员指南
- 我国科学家建立生成式模型为医学AI训练提供技术支持
- Diodes 推出符合车用标准的电流分流监测器,通过高精度电压感测快速检测系统故障
- Power Integrations面向800V汽车应用推出新型宽爬电距离开关IC
- 打破台积电垄断!联电夺下高通先进封装订单
- Ampere 年度展望:2025年重塑IT格局的四大关键趋势
- 存储巨头铠侠正式挂牌上市:首日股价上涨超10%
更多往期活动
厂商技术中心
随便看看
- 今日直播|瑞萨电子 RA 系列产品开发工具之 FSP4.0.0 新特性介绍
- 这变压器的原边和副边之间这个电容起什么作用?
- 集成电路静态时序分析与建模
- 发现个用树莓派RP2040搞的贴片机?全开源,感觉想DIY的又可以了
- 【Sipeed 高云GW2A FPGA开发板】——ARM Cortex-M0软核处理器_串口打印
- Matter Network Transport [Chinese] - Connectivity Standards Alliance
- AD编译时如何让这种未连接的网络报错?
- 又一个冷门?岛国压根不弱好吧
- 直播入口已开放| TI 低功耗技术在 Wi-Fi 摄像头及 PIR 红外传感器设计中的应用
- 【MPS商城钜惠体验季】--MPM3620AGQV-Z




 京公网安备 11010802033920号
京公网安备 11010802033920号