摘要:介绍了传统的串联谐振电源的工作原理,分析了其相位跟踪技术的缺点,给出了影响其相位跟踪的几个因素。根据逆变器偏离谐振点时续流二极管存在续流,对传统的相位跟踪技术提出了改进。实验证明,改进后的相位跟踪技术效果明显,保证了逆变器工作在谐振点附近,提高了静电除尘用大功率高压电源的可靠性。
关键词:相位跟踪;串联谐振;相位补偿
0 引言
为了减少大型工厂烟囱烟尘的排放,我们研制了大功率高压电源对工厂烟囱进行静电除尘。传统的高压电源有两种制作方法。
1)直接对市电升压,然后整流、滤波,这样制作的高压电源效率低,占地面积大,成本高。
2)采用AC/DC/AC/DC变换,利用改变频率的方法来改变电源的功率。这种方法解决了电源小型化的问题,降低了成本,但由于用于静电除尘的两个电极板随着烟尘吸附的多少而改变了电容介质,因而改变了负载的谐振频率。若逆变器的工作电压不变,则在谐振点附近的输出功率最大,当改变逆变器工作频率时,负载等效阻抗发生变化,输出功率减小,而且逆变器主开关管工作在硬开关状态,开关损耗大,效率低。
为了提高效率,减少开关损耗,所研制的高压逆变电源采用串联谐振式全桥DC/AC逆变电路,以IGBT为主开关器件,用新型的频率跟踪电路控制逆变器的工作频率,使逆变器始终工作于谐振状态,而且IGBT能始终工作在软开关状态,整机工作效率较高。串联谐振变换器是一种在理论和实际E都比较成熟的电路。但在实际研制过程中,仍有一些技术问题需要解决,本文对传统的相位跟踪技术做了进一步改进。
1 一般相位跟踪技术及其存在的问题
1.1 相位跟踪串联谐振逆变器的控制原理
静电除尘用大功率高压电源采用AC/DC/AC/DC的变换,逆变器采用单相桥式串联谐振逆变电路,其工作原理如图1所示。通过霍尔电流传感器对桥臂电流io进行采样,经过零比较器产生方波信号,使其与负载电压相位一致,并把其信号送至CD4046鉴相器,与控制信号进行相位比较,锁相环自动调节使其相位差为零,从而实现无相差的频率跟踪。根据实际负载回路的参数确定锁相环中的元件值,使负载回路频率的变化在锁相环的捕捉范围内,就可以使锁相环实现相位自动跟踪,负载电压与电流的相位差几乎为零。使逆变器的功率因数接近于1。
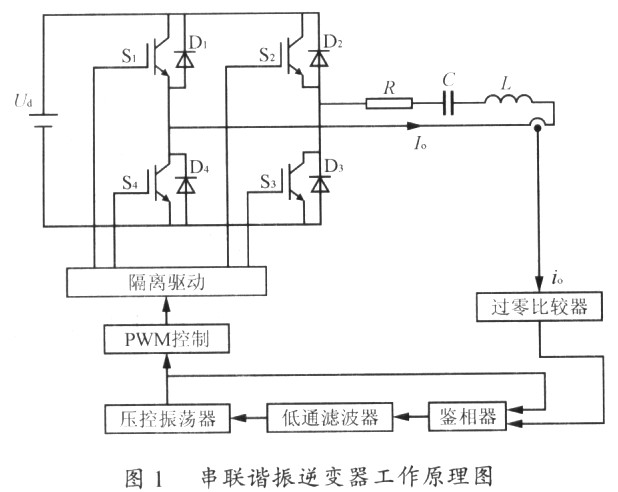 逆变器采用IGBT作为主电路开关,图1中S1"S4为IGBT开关器件,D1"D4为快恢复二极管,L为总的等效电感,C为总的等效电容,LC为串联谐振网络,S1~S4承受的电压为方波,电流为正弦波。如果S1~S4驱动信号的频率与LC串联谐振频率一致,则负载呈阻型,逆变器桥臂电压u。与桥臂电流Io的相位差为零,S1~S4在电流为零时开通关断(ZCS)。
串联谐振的谐振频率fo可由式(1)求出,品质因数由式(2)确定,变压器的谐振电压由式(3)确定。
逆变器采用IGBT作为主电路开关,图1中S1"S4为IGBT开关器件,D1"D4为快恢复二极管,L为总的等效电感,C为总的等效电容,LC为串联谐振网络,S1~S4承受的电压为方波,电流为正弦波。如果S1~S4驱动信号的频率与LC串联谐振频率一致,则负载呈阻型,逆变器桥臂电压u。与桥臂电流Io的相位差为零,S1~S4在电流为零时开通关断(ZCS)。
串联谐振的谐振频率fo可由式(1)求出,品质因数由式(2)确定,变压器的谐振电压由式(3)确定。
 l.2 传统的相位补偿及存在的问题
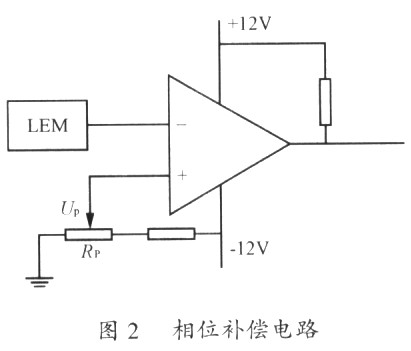
在实际电路中,电流采样、过零比较器比较、锁相跟踪、隔离驱动和IGBT的开关都需要时间,这将引起负载电压滞后于负载电流,使得逆变器工作在容性负载状态。因此,在实际控制电路中,必须解决相位补偿问题。传统解决相位补偿的方法就是利用CD4046锁相环的特点,调节比较器的比较电压,可以实现相位补偿。如图2所示,在比较器的正向输入端加一偏置电压Up,使比较器上升沿提前了时间△t,调整Rp可以改变偏置电压Up和提前时间△t,锁相环所对应的输出信号作为图1中S1的驱动信号,反向后作为S2的驱动信号,驱动信号相对电流而言,提前了时间△t,而△t正是相位补偿时间。调节Rp可以使逆变器工作在谐振状态。但装置在实际运行过程中,△t是会发生变化的。下面分析发生变化的几种主要因素。
l.2 传统的相位补偿及存在的问题
在实际电路中,电流采样、过零比较器比较、锁相跟踪、隔离驱动和IGBT的开关都需要时间,这将引起负载电压滞后于负载电流,使得逆变器工作在容性负载状态。因此,在实际控制电路中,必须解决相位补偿问题。传统解决相位补偿的方法就是利用CD4046锁相环的特点,调节比较器的比较电压,可以实现相位补偿。如图2所示,在比较器的正向输入端加一偏置电压Up,使比较器上升沿提前了时间△t,调整Rp可以改变偏置电压Up和提前时间△t,锁相环所对应的输出信号作为图1中S1的驱动信号,反向后作为S2的驱动信号,驱动信号相对电流而言,提前了时间△t,而△t正是相位补偿时间。调节Rp可以使逆变器工作在谐振状态。但装置在实际运行过程中,△t是会发生变化的。下面分析发生变化的几种主要因素。
 1.2.1 IGBT开关器件换流时间
静电除尘用高压电源在工作过程中负载不断变化,输出功率也发生变化,这都将导致负载电压电流的变化,负载电压电流的变化都对IGBT开关器件换流时间有影响。
当负载电流不变时,u越高换流时间越短;当负载电压不变时,负载电流越大,换流时间越长。
1.2.2 工作频率
静电除尘用高压电源的工作频率会跟踪负载谐振频率,而且负载谐振频率变化还比较大。经实际测量,在其它条件不变的情况下,频率为73 kHz时,电流信号滞后于控制信号时间△t=2.14μs,频率为50 Hz时,电流信号滞后于控制信号时间△t=2.25μs。由此可见,频率越高,△t越小,频率越低,△t越大。
l.2.3 电流取样信号的幅度
由于io在谐振点附近是正弦波,它存在过零比较延时,而且延时时间T2或者延时角度θ2除了与器件本身的延时有关外,还与检测的电流幅度有关。假设比较器的过零比较误差电压△U1>0,则延时相位为
1.2.1 IGBT开关器件换流时间
静电除尘用高压电源在工作过程中负载不断变化,输出功率也发生变化,这都将导致负载电压电流的变化,负载电压电流的变化都对IGBT开关器件换流时间有影响。
当负载电流不变时,u越高换流时间越短;当负载电压不变时,负载电流越大,换流时间越长。
1.2.2 工作频率
静电除尘用高压电源的工作频率会跟踪负载谐振频率,而且负载谐振频率变化还比较大。经实际测量,在其它条件不变的情况下,频率为73 kHz时,电流信号滞后于控制信号时间△t=2.14μs,频率为50 Hz时,电流信号滞后于控制信号时间△t=2.25μs。由此可见,频率越高,△t越小,频率越低,△t越大。
l.2.3 电流取样信号的幅度
由于io在谐振点附近是正弦波,它存在过零比较延时,而且延时时间T2或者延时角度θ2除了与器件本身的延时有关外,还与检测的电流幅度有关。假设比较器的过零比较误差电压△U1>0,则延时相位为
 式中:KIo为电流霍尔传感器检测输出电压峰值。
经实际测量,在其它条件不变的情况下,当KIo=3 V时,滞后时间△t=2μs,当KI=O.5V时,滞后时间△t=2.26μs,滞后时间与桥臂电流取样信号的幅度成反比。
2 相位跟踪技术的改进
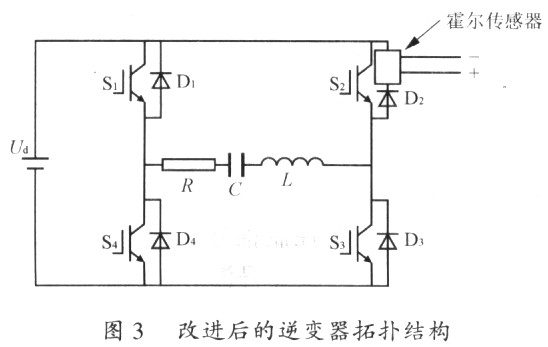
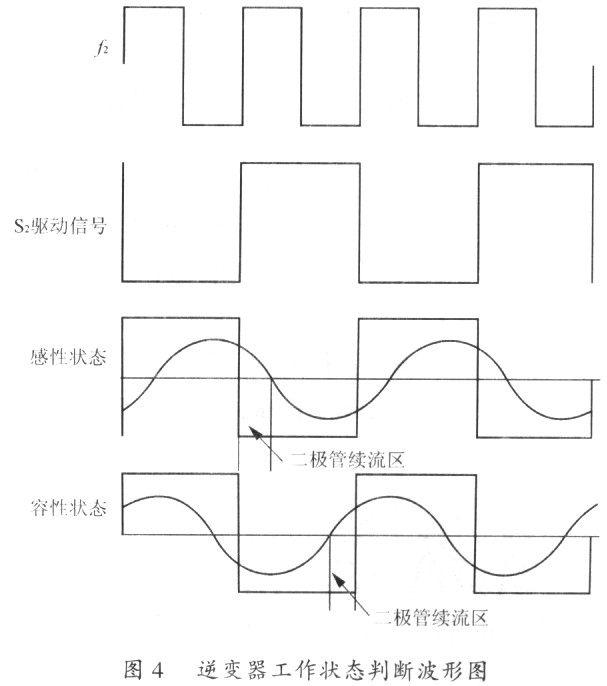
为了保证逆变器工作在谐振状态,必须分析逆变器偏离谐振点的特征。经研究发现,当逆变器工作在感性状态或容性状态时,并联在IGBT集电极和发射极的二极管存在续流,只要在D2上方加一个霍尔电流传感器(如图3所示),并根据其输出电压是靠近s,驱动信号的下降沿还是上升沿,就可判断逆变器是工作在感性状态还是容性状态。如图4所示,当二极管续流区靠近S2驱动信号的上升沿且驱动信号为高电平时,逆变器工作在感性状态;当二极管续流区靠近S2驱动信号的下降沿且驱动信号为高电平时,逆变器工作在容性状态;当二极管没有续流时,逆变器工作在谐振状态。为了判断逆变器的工作状态,可以取出一个s,驱动信号的二倍频信号f2(这个二倍频信号很容易由锁相环二倍频实现),由图4可以看出,当f2和S2驱动信号都为高电平时,二极管D2存在续流,则逆变器工作在感性状态,当f2为低电平,S2驱动信号为高电平时,二极管D2存在续流,则逆变器工作在容性状态。
式中:KIo为电流霍尔传感器检测输出电压峰值。
经实际测量,在其它条件不变的情况下,当KIo=3 V时,滞后时间△t=2μs,当KI=O.5V时,滞后时间△t=2.26μs,滞后时间与桥臂电流取样信号的幅度成反比。
2 相位跟踪技术的改进
为了保证逆变器工作在谐振状态,必须分析逆变器偏离谐振点的特征。经研究发现,当逆变器工作在感性状态或容性状态时,并联在IGBT集电极和发射极的二极管存在续流,只要在D2上方加一个霍尔电流传感器(如图3所示),并根据其输出电压是靠近s,驱动信号的下降沿还是上升沿,就可判断逆变器是工作在感性状态还是容性状态。如图4所示,当二极管续流区靠近S2驱动信号的上升沿且驱动信号为高电平时,逆变器工作在感性状态;当二极管续流区靠近S2驱动信号的下降沿且驱动信号为高电平时,逆变器工作在容性状态;当二极管没有续流时,逆变器工作在谐振状态。为了判断逆变器的工作状态,可以取出一个s,驱动信号的二倍频信号f2(这个二倍频信号很容易由锁相环二倍频实现),由图4可以看出,当f2和S2驱动信号都为高电平时,二极管D2存在续流,则逆变器工作在感性状态,当f2为低电平,S2驱动信号为高电平时,二极管D2存在续流,则逆变器工作在容性状态。
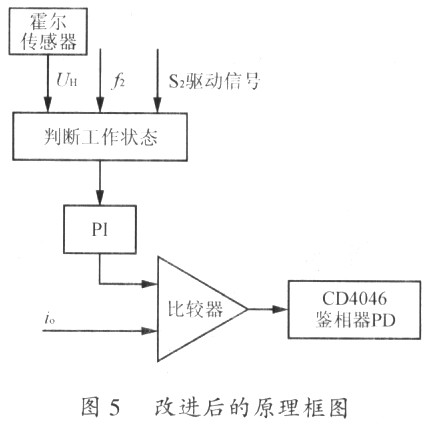
 改进的相位跟踪技术是基于原有PLL锁相环相位跟踪技术,并加入榆测控制电路。通过检测判断逆变器工作在什么状态,并通过PI调节,使其工作在谐振状态。当判断出逆变器工作在容性状态时,降低比较器的比较电压,增大相位补偿时间;当判断出逆变器工作在感性状态时提高比较器的比较电压,减小相位补偿时间,这样反复调节,只要桥臂电流滞后于控制信号的时间不超过控制信号周期的1/4(一般不会超过),就可以保证逆变器始终工作在谐振点附近。其原理框图如图5所示.
改进的相位跟踪技术是基于原有PLL锁相环相位跟踪技术,并加入榆测控制电路。通过检测判断逆变器工作在什么状态,并通过PI调节,使其工作在谐振状态。当判断出逆变器工作在容性状态时,降低比较器的比较电压,增大相位补偿时间;当判断出逆变器工作在感性状态时提高比较器的比较电压,减小相位补偿时间,这样反复调节,只要桥臂电流滞后于控制信号的时间不超过控制信号周期的1/4(一般不会超过),就可以保证逆变器始终工作在谐振点附近。其原理框图如图5所示.
 3 实验结果
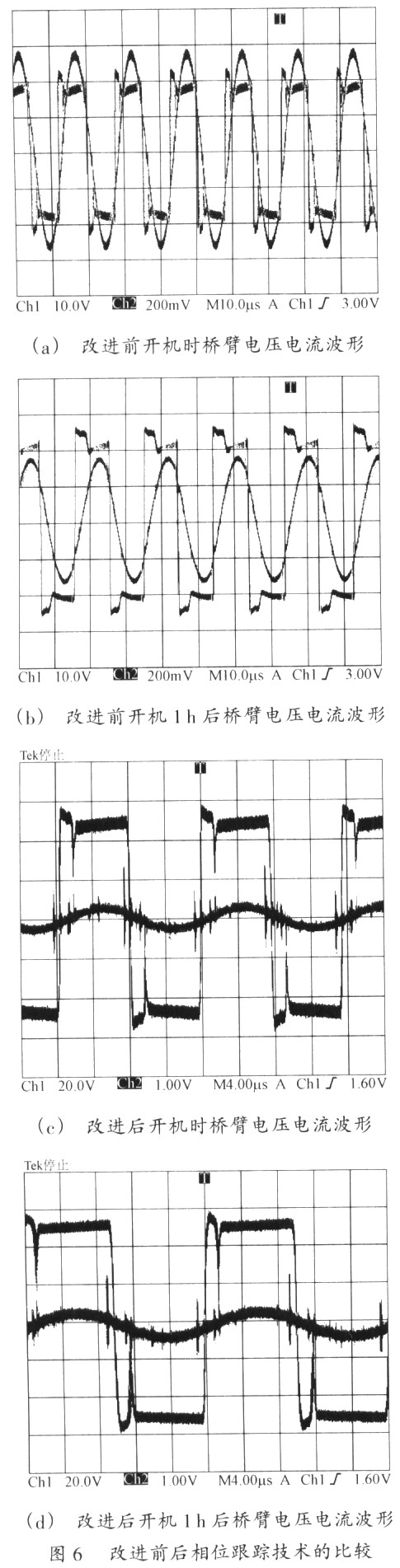
根据以上分析,我们利用传统相位跟踪技术和改进后的相位跟踪技术各研制了一台样机,并测出桥臂的电压电流波形,如图6所示。图中方波为桥臂取样电压,正弦波为桥臂取样电流。由图6可知两种方法都可以实现频率自动跟踪,但传统方法经常偏离谐振点工作。而改进后的相位跟踪技术则能保证逆变器工作在谐振点附近。
3 实验结果
根据以上分析,我们利用传统相位跟踪技术和改进后的相位跟踪技术各研制了一台样机,并测出桥臂的电压电流波形,如图6所示。图中方波为桥臂取样电压,正弦波为桥臂取样电流。由图6可知两种方法都可以实现频率自动跟踪,但传统方法经常偏离谐振点工作。而改进后的相位跟踪技术则能保证逆变器工作在谐振点附近。
 4 结语
实验证明,利用PLL相位跟踪技术可以实现频率自动跟踪,且具有电路简单、工作可靠等优点,但传统的相位跟踪技术受到lGBT开关换流时间,电源工作频率和桥臂电流取样信号幅度可变的影响。改进后的相位跟踪技术能够克服这些因素的影响,保证逆变器工作在谐振点附近,提高了静电除尘用高压电源的可靠性。
4 结语
实验证明,利用PLL相位跟踪技术可以实现频率自动跟踪,且具有电路简单、工作可靠等优点,但传统的相位跟踪技术受到lGBT开关换流时间,电源工作频率和桥臂电流取样信号幅度可变的影响。改进后的相位跟踪技术能够克服这些因素的影响,保证逆变器工作在谐振点附近,提高了静电除尘用高压电源的可靠性。
引用地址:静电除尘用大功率高压电源相位跟踪的研究
逆变器采用IGBT作为主电路开关,图1中S1"S4为IGBT开关器件,D1"D4为快恢复二极管,L为总的等效电感,C为总的等效电容,LC为串联谐振网络,S1~S4承受的电压为方波,电流为正弦波。如果S1~S4驱动信号的频率与LC串联谐振频率一致,则负载呈阻型,逆变器桥臂电压u。与桥臂电流Io的相位差为零,S1~S4在电流为零时开通关断(ZCS)。
串联谐振的谐振频率fo可由式(1)求出,品质因数由式(2)确定,变压器的谐振电压由式(3)确定。
l.2 传统的相位补偿及存在的问题
在实际电路中,电流采样、过零比较器比较、锁相跟踪、隔离驱动和IGBT的开关都需要时间,这将引起负载电压滞后于负载电流,使得逆变器工作在容性负载状态。因此,在实际控制电路中,必须解决相位补偿问题。传统解决相位补偿的方法就是利用CD4046锁相环的特点,调节比较器的比较电压,可以实现相位补偿。如图2所示,在比较器的正向输入端加一偏置电压Up,使比较器上升沿提前了时间△t,调整Rp可以改变偏置电压Up和提前时间△t,锁相环所对应的输出信号作为图1中S1的驱动信号,反向后作为S2的驱动信号,驱动信号相对电流而言,提前了时间△t,而△t正是相位补偿时间。调节Rp可以使逆变器工作在谐振状态。但装置在实际运行过程中,△t是会发生变化的。下面分析发生变化的几种主要因素。
1.2.1 IGBT开关器件换流时间
静电除尘用高压电源在工作过程中负载不断变化,输出功率也发生变化,这都将导致负载电压电流的变化,负载电压电流的变化都对IGBT开关器件换流时间有影响。
当负载电流不变时,u越高换流时间越短;当负载电压不变时,负载电流越大,换流时间越长。
1.2.2 工作频率
静电除尘用高压电源的工作频率会跟踪负载谐振频率,而且负载谐振频率变化还比较大。经实际测量,在其它条件不变的情况下,频率为73 kHz时,电流信号滞后于控制信号时间△t=2.14μs,频率为50 Hz时,电流信号滞后于控制信号时间△t=2.25μs。由此可见,频率越高,△t越小,频率越低,△t越大。
l.2.3 电流取样信号的幅度
由于io在谐振点附近是正弦波,它存在过零比较延时,而且延时时间T2或者延时角度θ2除了与器件本身的延时有关外,还与检测的电流幅度有关。假设比较器的过零比较误差电压△U1>0,则延时相位为
式中:KIo为电流霍尔传感器检测输出电压峰值。
经实际测量,在其它条件不变的情况下,当KIo=3 V时,滞后时间△t=2μs,当KI=O.5V时,滞后时间△t=2.26μs,滞后时间与桥臂电流取样信号的幅度成反比。
2 相位跟踪技术的改进
为了保证逆变器工作在谐振状态,必须分析逆变器偏离谐振点的特征。经研究发现,当逆变器工作在感性状态或容性状态时,并联在IGBT集电极和发射极的二极管存在续流,只要在D2上方加一个霍尔电流传感器(如图3所示),并根据其输出电压是靠近s,驱动信号的下降沿还是上升沿,就可判断逆变器是工作在感性状态还是容性状态。如图4所示,当二极管续流区靠近S2驱动信号的上升沿且驱动信号为高电平时,逆变器工作在感性状态;当二极管续流区靠近S2驱动信号的下降沿且驱动信号为高电平时,逆变器工作在容性状态;当二极管没有续流时,逆变器工作在谐振状态。为了判断逆变器的工作状态,可以取出一个s,驱动信号的二倍频信号f2(这个二倍频信号很容易由锁相环二倍频实现),由图4可以看出,当f2和S2驱动信号都为高电平时,二极管D2存在续流,则逆变器工作在感性状态,当f2为低电平,S2驱动信号为高电平时,二极管D2存在续流,则逆变器工作在容性状态。
改进的相位跟踪技术是基于原有PLL锁相环相位跟踪技术,并加入榆测控制电路。通过检测判断逆变器工作在什么状态,并通过PI调节,使其工作在谐振状态。当判断出逆变器工作在容性状态时,降低比较器的比较电压,增大相位补偿时间;当判断出逆变器工作在感性状态时提高比较器的比较电压,减小相位补偿时间,这样反复调节,只要桥臂电流滞后于控制信号的时间不超过控制信号周期的1/4(一般不会超过),就可以保证逆变器始终工作在谐振点附近。其原理框图如图5所示.
3 实验结果
根据以上分析,我们利用传统相位跟踪技术和改进后的相位跟踪技术各研制了一台样机,并测出桥臂的电压电流波形,如图6所示。图中方波为桥臂取样电压,正弦波为桥臂取样电流。由图6可知两种方法都可以实现频率自动跟踪,但传统方法经常偏离谐振点工作。而改进后的相位跟踪技术则能保证逆变器工作在谐振点附近。
4 结语
实验证明,利用PLL相位跟踪技术可以实现频率自动跟踪,且具有电路简单、工作可靠等优点,但传统的相位跟踪技术受到lGBT开关换流时间,电源工作频率和桥臂电流取样信号幅度可变的影响。改进后的相位跟踪技术能够克服这些因素的影响,保证逆变器工作在谐振点附近,提高了静电除尘用高压电源的可靠性。
上一篇:简易锂电池保护IC测试电路的设计
下一篇:低电压数字系统电源设计技术
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 CLC406AIB
CLC406AIB










 京公网安备 11010802033920号
京公网安备 11010802033920号