摘要:RX5000和TX5000分别是RF Micro Devices公司专为小范围单向无线通信设计生产的接收器和发射器芯片。它们体积小,功耗低,价格便宜,而且性能稳定,使用方便。文中介绍了RX5000、TX5000的特点与功能,给出了以这两种器件为核心设计的无线收发电路,并对其在足球机器人无线通信系统中的应用进行了说明。
关键词:无线通信;RX5000;TX5000;足球机器人
RX系列和TX系列无线收发芯片是RF Micro Devices公司专门为小范围单向无线通信设计的集成电路。该系列芯片具有体积小,功耗低,价格便宜等优点,而且性能稳定,容易使用。芯片中集成了几乎所有的无线通信功能。由于所需外设很少,因而电路设计简单,是小范围无线控制以及数据通信的理想选择。本文介绍的RX5000、TX5000就是一组配套使用的无线收发芯片,以它们为核心进行电路设计可以实现完整的无线通信系统。当然,两个器件也可以单独使用,可设计构成独立的无线接收器和发射器。
 1 RX5000和TX5000的特点
RX5000接收器和TX5000发射器芯片的工作频率均为433.92MHz,工作电压为2.2~3.7V,工作温度范围为-50~+100℃,它们支持高达115.2kbps的数据传输率。
RX5000、TX5000均提供有休眠模式(Sleep Mode),这使其在没有数据通信的时候可以降低芯片的功耗。TX5000有On-Off Keyed OOK 和 Ampli-tude-Shift KeyedASK两种可选的工作模式。在OOK工作模式中,信号输出端以通断脉冲来表示信号“1”和“0”;而在ASK工作模式中,输出信号则分别以高、低电平来表示信号“1”和“0”;休眠模式的信号端通常被置于高阻状态。OOK模式的功耗较低,但数据传输率也低(10kbps);ASK模式的功耗较高,但数据传输率也较高(115.2kbps)。由于在ASK模式时,信号可调幅,因此抗干扰能力也较强,所以大多数应用都采取ASK模式。工作模式的选择可通过CNTRL0和CNTRL1引脚来设置。
一般情况,设计时都将RX5000与TX5000配套使用,但RX5000应选择与TX5000相同的工作模式。此时,RX5000的CNTRL0、CNTRL1引脚仅用于工作模式与休眠模式的切换,而OOK模式与ASK模式的选择则将对应于不同的外围电路。
本文着重介绍RX5000、TX5000的功能及应用,而对其工作原理和内部结构,读者可参考相关技术手册[1][2]。
2 RX5000和TX5000的引脚功能
2.1 RX5000引脚功能
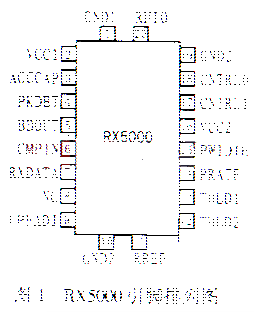
RX5000接收器芯片具有20个引脚。图1所示是其引脚排列图,各引脚的具体功能如下:
GND1,GND2,GND3:参考接地端。
VCC1,VCC2:电源端,它们与地之间须接有旁路电容。
AGCCAP:自动增益控制端,该引脚与地之间所接的电容可设定保持AGC(自动增益控制)的最小时间。该保持时间的设定可以避免AGC发生颤动。对于给定的保持时间tAGH(μs),接地电容CAGCμF的值可按下式计算:
CAGC=19.1 tAGH
1 RX5000和TX5000的特点
RX5000接收器和TX5000发射器芯片的工作频率均为433.92MHz,工作电压为2.2~3.7V,工作温度范围为-50~+100℃,它们支持高达115.2kbps的数据传输率。
RX5000、TX5000均提供有休眠模式(Sleep Mode),这使其在没有数据通信的时候可以降低芯片的功耗。TX5000有On-Off Keyed OOK 和 Ampli-tude-Shift KeyedASK两种可选的工作模式。在OOK工作模式中,信号输出端以通断脉冲来表示信号“1”和“0”;而在ASK工作模式中,输出信号则分别以高、低电平来表示信号“1”和“0”;休眠模式的信号端通常被置于高阻状态。OOK模式的功耗较低,但数据传输率也低(10kbps);ASK模式的功耗较高,但数据传输率也较高(115.2kbps)。由于在ASK模式时,信号可调幅,因此抗干扰能力也较强,所以大多数应用都采取ASK模式。工作模式的选择可通过CNTRL0和CNTRL1引脚来设置。
一般情况,设计时都将RX5000与TX5000配套使用,但RX5000应选择与TX5000相同的工作模式。此时,RX5000的CNTRL0、CNTRL1引脚仅用于工作模式与休眠模式的切换,而OOK模式与ASK模式的选择则将对应于不同的外围电路。
本文着重介绍RX5000、TX5000的功能及应用,而对其工作原理和内部结构,读者可参考相关技术手册[1][2]。
2 RX5000和TX5000的引脚功能
2.1 RX5000引脚功能
RX5000接收器芯片具有20个引脚。图1所示是其引脚排列图,各引脚的具体功能如下:
GND1,GND2,GND3:参考接地端。
VCC1,VCC2:电源端,它们与地之间须接有旁路电容。
AGCCAP:自动增益控制端,该引脚与地之间所接的电容可设定保持AGC(自动增益控制)的最小时间。该保持时间的设定可以避免AGC发生颤动。对于给定的保持时间tAGH(μs),接地电容CAGCμF的值可按下式计算:
CAGC=19.1 tAGH
 但应注意,AGC的保持时间不应太长,否则会导致反应变慢而影响电路的灵敏性。
PKDET:峰值检测控制端,该引脚与地之间所接的电容可设定峰值检测器衰减倍数,若使其衰减率固定在11000,对于给定的基带电容CBBO来说,接地电容CPKD的值可按下式计算:
CPKD=0.33CBB0(pF)
BBOUT:基带输出端,该引脚通过一电容CBBO与CMPIN相连可驱动内部数据限幅器。
CMPIN:内部数据限幅器输入端。
RXDATA:接收器数据输出端,在休眠模式时,该引脚被置于高阻态。
NC:悬空。
LPFADJ:低通滤波器带宽调整端,其带宽可由该引脚的接地电阻RLPF来设置,它们之间具有如下关系式:
RLPF=1445/fLPF(kHz)(kΩ)
RREF:外接参考电阻端,通常应接一100kΩ的电阻到地。
THLD1:数据限幅器(DS1)阈值设置端,该引脚一般通过一电阻RTH1与RREF相连,其阈值与该电阻的阻值成正比。若将THLD1与RREF直接相连,则阈值为0;通过电阻相连时,如果THLD2端悬空,则RTH1的阻值范围为0~100kΩ,提供的THLD1阈值范围为0~90mV如果同时使用THLD2端,则RTH1的阻值范围为0~200kΩ,而其提供的THLD1阈值范围亦为0~90mV。
THLD2:数据限幅器(DS2)阈值设置端,该脚用法与THLD1相同。RTH2的阻值范围为0~200kΩ,提供的THLD2阈值范围为0~120mV。
PRATE:脉冲占空比调节端。
PWIDTH:脉冲宽度调节端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1与CNTRL0均为高电平时,选择接收模式;两者均为低电平时,选择休眠模式(Sleep Mode)。应当注意:这两脚不能被空置。
但应注意,AGC的保持时间不应太长,否则会导致反应变慢而影响电路的灵敏性。
PKDET:峰值检测控制端,该引脚与地之间所接的电容可设定峰值检测器衰减倍数,若使其衰减率固定在11000,对于给定的基带电容CBBO来说,接地电容CPKD的值可按下式计算:
CPKD=0.33CBB0(pF)
BBOUT:基带输出端,该引脚通过一电容CBBO与CMPIN相连可驱动内部数据限幅器。
CMPIN:内部数据限幅器输入端。
RXDATA:接收器数据输出端,在休眠模式时,该引脚被置于高阻态。
NC:悬空。
LPFADJ:低通滤波器带宽调整端,其带宽可由该引脚的接地电阻RLPF来设置,它们之间具有如下关系式:
RLPF=1445/fLPF(kHz)(kΩ)
RREF:外接参考电阻端,通常应接一100kΩ的电阻到地。
THLD1:数据限幅器(DS1)阈值设置端,该引脚一般通过一电阻RTH1与RREF相连,其阈值与该电阻的阻值成正比。若将THLD1与RREF直接相连,则阈值为0;通过电阻相连时,如果THLD2端悬空,则RTH1的阻值范围为0~100kΩ,提供的THLD1阈值范围为0~90mV如果同时使用THLD2端,则RTH1的阻值范围为0~200kΩ,而其提供的THLD1阈值范围亦为0~90mV。
THLD2:数据限幅器(DS2)阈值设置端,该脚用法与THLD1相同。RTH2的阻值范围为0~200kΩ,提供的THLD2阈值范围为0~120mV。
PRATE:脉冲占空比调节端。
PWIDTH:脉冲宽度调节端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1与CNTRL0均为高电平时,选择接收模式;两者均为低电平时,选择休眠模式(Sleep Mode)。应当注意:这两脚不能被空置。
 RFIO:接收器无线信号输入端,该端一般在使用时接天线。
2.2 TX5000引脚功能
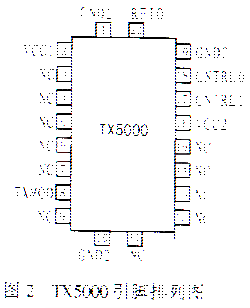
TX5000引脚排列如图2所示。其主要引脚的功能如下:
TXMOD:发送数据输入端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1为高而CNTRL0为低时,为ASK模式;而当CNTRL1为低且CNTRL0高时,为OOK模式;CNTRL1和CNTRL0均为低时,为休眠模式。
RFIO:无线信号输出端,使用时接天线。
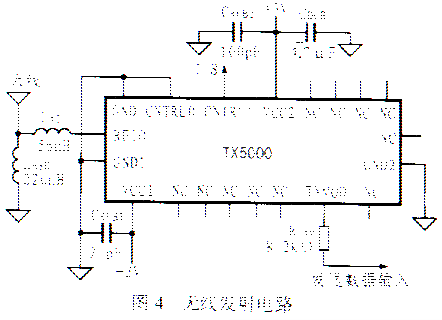
3 无线收发电路
采用RX5000和TX5000设计的无线接收和发射电路分别如图3、图4所示,这两个电路均被设置为ASK模式。
4 足球机器人无线通信应用
实际上,上述无线收发电路可以方便地嵌入到各种测量和控制系统中,以用于仪器仪表中的数据采集、无线数据通信以及计算机遥控等。下面介绍RX5000和TX5000在足球机器人无线通信系统中的应用方法。
RFIO:接收器无线信号输入端,该端一般在使用时接天线。
2.2 TX5000引脚功能
TX5000引脚排列如图2所示。其主要引脚的功能如下:
TXMOD:发送数据输入端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1为高而CNTRL0为低时,为ASK模式;而当CNTRL1为低且CNTRL0高时,为OOK模式;CNTRL1和CNTRL0均为低时,为休眠模式。
RFIO:无线信号输出端,使用时接天线。
3 无线收发电路
采用RX5000和TX5000设计的无线接收和发射电路分别如图3、图4所示,这两个电路均被设置为ASK模式。
4 足球机器人无线通信应用
实际上,上述无线收发电路可以方便地嵌入到各种测量和控制系统中,以用于仪器仪表中的数据采集、无线数据通信以及计算机遥控等。下面介绍RX5000和TX5000在足球机器人无线通信系统中的应用方法。
 机器人足球是近几年在国内外迅速开展起来的高技术对抗活动,已举行了多届微型机器人世界杯足球比赛,有十余个国家的二、三十支代表队参赛,已经达到相当的规模和水平3。足球机器人系统由机器人、视觉系统、主机系统和无线通信系统组成。主机系统与机器人之间通过无线通信联系。具体来说,就是主机通过发射器以无线方式发送动作命令,然后由机器人上的接收器接收,这实际上就是一个单向通信系统。
目前各参赛队使用的机器人通信系统,大多采用的是Radiometrix公司生产的具有收发功能的通讯模块BIM-433和BIM-418,它们的工作频率分别为433MHz和418MHz,工作电压为2.7~6.26V,数据最高传输速率为40kbps,户内传输距离为30米,户外可达120米。由于足球机器人的通信系统只是单向系统(即主机→机器人),但在发射器和接收器上均采用具有收发功能的BIM双向通讯模块,这实际上是一种浪费,而且还增大了功耗,提高了设计和制造成本(每片BIM通讯模块的价格高达五六百元)。若采用本文介绍的无线收发电路,不仅可避免功能的浪费,还可减少功耗,降低成本(每片RX5000、TX5000的价格不到一百元),而且数据传输率也比BIM模块高。虽然传输距离比BIM小,但经测试,在户内可达20米,在户外也可以达到100米以上,完全可以满足机器人足球比赛的要求。
本无线收发电路已应用于某高校的足球机器人比赛系统,经多次测试运行,该系统性能稳定,效果十分良好。
机器人足球是近几年在国内外迅速开展起来的高技术对抗活动,已举行了多届微型机器人世界杯足球比赛,有十余个国家的二、三十支代表队参赛,已经达到相当的规模和水平3。足球机器人系统由机器人、视觉系统、主机系统和无线通信系统组成。主机系统与机器人之间通过无线通信联系。具体来说,就是主机通过发射器以无线方式发送动作命令,然后由机器人上的接收器接收,这实际上就是一个单向通信系统。
目前各参赛队使用的机器人通信系统,大多采用的是Radiometrix公司生产的具有收发功能的通讯模块BIM-433和BIM-418,它们的工作频率分别为433MHz和418MHz,工作电压为2.7~6.26V,数据最高传输速率为40kbps,户内传输距离为30米,户外可达120米。由于足球机器人的通信系统只是单向系统(即主机→机器人),但在发射器和接收器上均采用具有收发功能的BIM双向通讯模块,这实际上是一种浪费,而且还增大了功耗,提高了设计和制造成本(每片BIM通讯模块的价格高达五六百元)。若采用本文介绍的无线收发电路,不仅可避免功能的浪费,还可减少功耗,降低成本(每片RX5000、TX5000的价格不到一百元),而且数据传输率也比BIM模块高。虽然传输距离比BIM小,但经测试,在户内可达20米,在户外也可以达到100米以上,完全可以满足机器人足球比赛的要求。
本无线收发电路已应用于某高校的足球机器人比赛系统,经多次测试运行,该系统性能稳定,效果十分良好。
引用地址:基于RX5000/TX5000的无线收发电路
1 RX5000和TX5000的特点
RX5000接收器和TX5000发射器芯片的工作频率均为433.92MHz,工作电压为2.2~3.7V,工作温度范围为-50~+100℃,它们支持高达115.2kbps的数据传输率。
RX5000、TX5000均提供有休眠模式(Sleep Mode),这使其在没有数据通信的时候可以降低芯片的功耗。TX5000有On-Off Keyed OOK 和 Ampli-tude-Shift KeyedASK两种可选的工作模式。在OOK工作模式中,信号输出端以通断脉冲来表示信号“1”和“0”;而在ASK工作模式中,输出信号则分别以高、低电平来表示信号“1”和“0”;休眠模式的信号端通常被置于高阻状态。OOK模式的功耗较低,但数据传输率也低(10kbps);ASK模式的功耗较高,但数据传输率也较高(115.2kbps)。由于在ASK模式时,信号可调幅,因此抗干扰能力也较强,所以大多数应用都采取ASK模式。工作模式的选择可通过CNTRL0和CNTRL1引脚来设置。
一般情况,设计时都将RX5000与TX5000配套使用,但RX5000应选择与TX5000相同的工作模式。此时,RX5000的CNTRL0、CNTRL1引脚仅用于工作模式与休眠模式的切换,而OOK模式与ASK模式的选择则将对应于不同的外围电路。
本文着重介绍RX5000、TX5000的功能及应用,而对其工作原理和内部结构,读者可参考相关技术手册[1][2]。
2 RX5000和TX5000的引脚功能
2.1 RX5000引脚功能
RX5000接收器芯片具有20个引脚。图1所示是其引脚排列图,各引脚的具体功能如下:
GND1,GND2,GND3:参考接地端。
VCC1,VCC2:电源端,它们与地之间须接有旁路电容。
AGCCAP:自动增益控制端,该引脚与地之间所接的电容可设定保持AGC(自动增益控制)的最小时间。该保持时间的设定可以避免AGC发生颤动。对于给定的保持时间tAGH(μs),接地电容CAGCμF的值可按下式计算:
CAGC=19.1 tAGH
但应注意,AGC的保持时间不应太长,否则会导致反应变慢而影响电路的灵敏性。
PKDET:峰值检测控制端,该引脚与地之间所接的电容可设定峰值检测器衰减倍数,若使其衰减率固定在11000,对于给定的基带电容CBBO来说,接地电容CPKD的值可按下式计算:
CPKD=0.33CBB0(pF)
BBOUT:基带输出端,该引脚通过一电容CBBO与CMPIN相连可驱动内部数据限幅器。
CMPIN:内部数据限幅器输入端。
RXDATA:接收器数据输出端,在休眠模式时,该引脚被置于高阻态。
NC:悬空。
LPFADJ:低通滤波器带宽调整端,其带宽可由该引脚的接地电阻RLPF来设置,它们之间具有如下关系式:
RLPF=1445/fLPF(kHz)(kΩ)
RREF:外接参考电阻端,通常应接一100kΩ的电阻到地。
THLD1:数据限幅器(DS1)阈值设置端,该引脚一般通过一电阻RTH1与RREF相连,其阈值与该电阻的阻值成正比。若将THLD1与RREF直接相连,则阈值为0;通过电阻相连时,如果THLD2端悬空,则RTH1的阻值范围为0~100kΩ,提供的THLD1阈值范围为0~90mV如果同时使用THLD2端,则RTH1的阻值范围为0~200kΩ,而其提供的THLD1阈值范围亦为0~90mV。
THLD2:数据限幅器(DS2)阈值设置端,该脚用法与THLD1相同。RTH2的阻值范围为0~200kΩ,提供的THLD2阈值范围为0~120mV。
PRATE:脉冲占空比调节端。
PWIDTH:脉冲宽度调节端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1与CNTRL0均为高电平时,选择接收模式;两者均为低电平时,选择休眠模式(Sleep Mode)。应当注意:这两脚不能被空置。
RFIO:接收器无线信号输入端,该端一般在使用时接天线。
2.2 TX5000引脚功能
TX5000引脚排列如图2所示。其主要引脚的功能如下:
TXMOD:发送数据输入端。
CNTRL1,CNTRL0:芯片工作模式选择端。当CNTRL1为高而CNTRL0为低时,为ASK模式;而当CNTRL1为低且CNTRL0高时,为OOK模式;CNTRL1和CNTRL0均为低时,为休眠模式。
RFIO:无线信号输出端,使用时接天线。
3 无线收发电路
采用RX5000和TX5000设计的无线接收和发射电路分别如图3、图4所示,这两个电路均被设置为ASK模式。
4 足球机器人无线通信应用
实际上,上述无线收发电路可以方便地嵌入到各种测量和控制系统中,以用于仪器仪表中的数据采集、无线数据通信以及计算机遥控等。下面介绍RX5000和TX5000在足球机器人无线通信系统中的应用方法。
机器人足球是近几年在国内外迅速开展起来的高技术对抗活动,已举行了多届微型机器人世界杯足球比赛,有十余个国家的二、三十支代表队参赛,已经达到相当的规模和水平3。足球机器人系统由机器人、视觉系统、主机系统和无线通信系统组成。主机系统与机器人之间通过无线通信联系。具体来说,就是主机通过发射器以无线方式发送动作命令,然后由机器人上的接收器接收,这实际上就是一个单向通信系统。
目前各参赛队使用的机器人通信系统,大多采用的是Radiometrix公司生产的具有收发功能的通讯模块BIM-433和BIM-418,它们的工作频率分别为433MHz和418MHz,工作电压为2.7~6.26V,数据最高传输速率为40kbps,户内传输距离为30米,户外可达120米。由于足球机器人的通信系统只是单向系统(即主机→机器人),但在发射器和接收器上均采用具有收发功能的BIM双向通讯模块,这实际上是一种浪费,而且还增大了功耗,提高了设计和制造成本(每片BIM通讯模块的价格高达五六百元)。若采用本文介绍的无线收发电路,不仅可避免功能的浪费,还可减少功耗,降低成本(每片RX5000、TX5000的价格不到一百元),而且数据传输率也比BIM模块高。虽然传输距离比BIM小,但经测试,在户内可达20米,在户外也可以达到100米以上,完全可以满足机器人足球比赛的要求。
本无线收发电路已应用于某高校的足球机器人比赛系统,经多次测试运行,该系统性能稳定,效果十分良好。
上一篇:基于无线收发数传模块PTR2030的温度测控系统设计
下一篇:MiniGUI在车载导航终端中的应用
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 5962-9325901MPX
5962-9325901MPX










 京公网安备 11010802033920号
京公网安备 11010802033920号