摘 要:陀螺仪是舰船上的重要组成部件,其性能的稳定对于舰船的控制至关重要。将Fuzzy-PID算法应用于陀螺仪温度控制系统,以MCS-51单片机作为温度控制系统的核心部件,采用模糊PID算法以及其他的软硬件设计,实现了一套温度采集和控制的设计方案。
关键词:温度控制;Fuzzy-PID;陀螺仪
引言
---在舰船中,陀螺仪是关键的部件,陀螺球体与陀螺壳体之间的空间内充满悬浮液体。陀螺球体质量和悬浮液体比重的选择,应确保在悬浮液体加热到工作温度以后,陀螺球体可以拥有中性浮力。所以温度控制系统的设计应保证加热和保持充入陀螺部件的液体的常值工作温度为70%26;#177;0.2℃,因为在这个温度上陀螺球体具有中性浮力。
---传统控制方法(包括经典控制和现代控制)在处理具有非线形或不精确特性的被控对象时十分困难。而温度系统为大滞后系统,较大的纯滞后可引起系统不稳定。大量的应用实践表明,采用传统的PID控制稳态响应特性较好,但难以得到满意的动态响应特性。模糊控制的优点是能够得到较好的动态响应特性,并且无需知道被控对象的数学模型,适应性强,上升时间快,鲁棒性好。但模糊控制也存在固有的缺点,容易受模糊规则有限等级的限制而引起误差。本设计中采用AT89C52作为控制内核,并采用了Fuzzy-PID复合控制。弥补了单纯采用PID算法的不足。对PID参数的模糊自适应整定进一步完善了PID控制的自适应性能,在实际应用中取得了很好的效果。
温度控制系统的工作原理
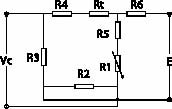 ---陀螺仪温度控制系统主要由温度传感器、AT89C52单片机、A/D信号采集模块、可控硅输出控制及其他一些外围电路组成。系统的被控对象是陀螺部件内的液体温度,执行机构是可控硅触发电路。工作温度借助电桥测量。电桥的三个臂是配置在控制系统内的电阻,第四个臂是陀螺部件加热温度传感器的电阻。来自电桥的信号值通过高精度集成运放OP07进行差动放大、滤波,然后再送给A/D采样。根据测量的电流端和电压端原理,电桥电压信号的采集采用三线制接法,如图1所示。这是一种最实用又能较精确测温的方式,R4、R5和R6为连线和接触电阻。由于采用上述三线制接法,调整R1即可使包括R5在内的电桥平衡,而R4可通过R6抵消,因此工业上常用这种接法进行精密温度测量。控制部分采用Fuzzy-PID的复合控制使单片机输出PWM脉冲,进而控制执行机构输出到陀螺加热器的电流量,实现陀螺加热器的温度自动调节控制。由于采用了模糊自适应PID控制算法,系统就可以在没有操作者干预的情况下根据控制系统的实际响应情况,自动实现对PID参数的最佳调整,改变PWM输出波形的占空比,合理地控制输出,使陀螺加热器的工作温度保持恒定,实现自动控制,这也是设计该温控制系统的关键所在。
温度控制系统的设计
---陀螺仪温度控制系统主要由温度传感器、AT89C52单片机、A/D信号采集模块、可控硅输出控制及其他一些外围电路组成。系统的被控对象是陀螺部件内的液体温度,执行机构是可控硅触发电路。工作温度借助电桥测量。电桥的三个臂是配置在控制系统内的电阻,第四个臂是陀螺部件加热温度传感器的电阻。来自电桥的信号值通过高精度集成运放OP07进行差动放大、滤波,然后再送给A/D采样。根据测量的电流端和电压端原理,电桥电压信号的采集采用三线制接法,如图1所示。这是一种最实用又能较精确测温的方式,R4、R5和R6为连线和接触电阻。由于采用上述三线制接法,调整R1即可使包括R5在内的电桥平衡,而R4可通过R6抵消,因此工业上常用这种接法进行精密温度测量。控制部分采用Fuzzy-PID的复合控制使单片机输出PWM脉冲,进而控制执行机构输出到陀螺加热器的电流量,实现陀螺加热器的温度自动调节控制。由于采用了模糊自适应PID控制算法,系统就可以在没有操作者干预的情况下根据控制系统的实际响应情况,自动实现对PID参数的最佳调整,改变PWM输出波形的占空比,合理地控制输出,使陀螺加热器的工作温度保持恒定,实现自动控制,这也是设计该温控制系统的关键所在。
温度控制系统的设计
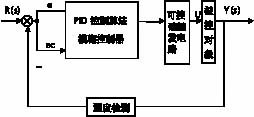 ---根据陀螺仪模糊控制系统的要求可知,加热器工作时产生热量,使陀螺部件内液体温度升高,进而使温度传感器的阻值增大(对于正温度系数热敏电阻),则温度检测电路把温度变化信号送回输入端和给定的温度进行比较,再产生偏差、偏差变化率信号,经模糊控制器进行推理从而产生控制加热器的信号,对加热器进行控制。Fuzzy-PID温度控制系统的结构框图如图2所示。系统主要由被控对象、温度传感器检测回路、Fuzzy-PID控制器和执行机构等组成。
● 数字PID控制设计
---利用脉冲响应法测量被控对象的传递函数为一阶惯性环节加纯滞后。
---其中,K为对象放大系数,K=300℃/100V;τ为纯滞后时间,τ=50s;T为对象时间常数,T=200s。
---单片机控制是一种采样控制,系统采用的增量式数字PID控制算法为:
---Δu(n)=U(n)-U(n-1)=a0e(n)-a1e(n-1)+a2e(n-2)
---a0=kp(1+T/T1+TD/T)
---a1=kp(1+2TD/T)
---a2=kpTD/T
---式中,T为采样周期。参照响应曲线选择,最后结合实验确定为采样周期。利用控制软件实现增量式控制算法,并输出控制量。由于该控制算法不需要累加,控制增量仅与最近的n次采样有关,所以误动作时影响小,而且较容易通过加权处理获得比较好的控制效果。这也是系统采用此增量式PID控制算法,作为模糊PID控制器中PID调节器部分算法的主要理由。
● 模糊PID控制器设计
---根据陀螺仪模糊控制系统的要求可知,加热器工作时产生热量,使陀螺部件内液体温度升高,进而使温度传感器的阻值增大(对于正温度系数热敏电阻),则温度检测电路把温度变化信号送回输入端和给定的温度进行比较,再产生偏差、偏差变化率信号,经模糊控制器进行推理从而产生控制加热器的信号,对加热器进行控制。Fuzzy-PID温度控制系统的结构框图如图2所示。系统主要由被控对象、温度传感器检测回路、Fuzzy-PID控制器和执行机构等组成。
● 数字PID控制设计
---利用脉冲响应法测量被控对象的传递函数为一阶惯性环节加纯滞后。
---其中,K为对象放大系数,K=300℃/100V;τ为纯滞后时间,τ=50s;T为对象时间常数,T=200s。
---单片机控制是一种采样控制,系统采用的增量式数字PID控制算法为:
---Δu(n)=U(n)-U(n-1)=a0e(n)-a1e(n-1)+a2e(n-2)
---a0=kp(1+T/T1+TD/T)
---a1=kp(1+2TD/T)
---a2=kpTD/T
---式中,T为采样周期。参照响应曲线选择,最后结合实验确定为采样周期。利用控制软件实现增量式控制算法,并输出控制量。由于该控制算法不需要累加,控制增量仅与最近的n次采样有关,所以误动作时影响小,而且较容易通过加权处理获得比较好的控制效果。这也是系统采用此增量式PID控制算法,作为模糊PID控制器中PID调节器部分算法的主要理由。
● 模糊PID控制器设计
 ---首先根据模糊数学的理论和方法,将操作人员的调整经验和技术知识总结成为IF(条件)、THEN(结果)形式的模糊规则,并把这些模糊规则及相关信息(如初始的PID参数)存入计算机中。根据检测回路的响应情况,计算出采样时刻的偏差e及偏差的变化率ec,输入控制器,运用模糊推理,进行模糊运算,即可得到该时刻的Kp、Ki、Kd,实现对PID参数的最佳调整。
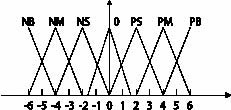
---Fuzzy-PID控制器是在PID参数预整定的基础上,利用模糊规则实时在线整定PID控制器的三个修正参数△Kp、△Ki、△Kd,实现对温度的优化控制。模糊控制器的输入、输出变量都是精确量,模糊推理是针对模糊量进行的,因此控制器首先要对输入量进行模糊化处理。在所设计的Fuzzy-PID控制器中,输入、输出变量的语言值均分为七个语言值:{NB、NM、NS、O、PS、PM、PB},子集中元素分别代表负大、负中、负小、零、正小、正中和正大。隶属度函数采用灵敏性强的三角函数。为增强系统的鲁棒性,提高隶属度函数的分辨率,在0值附近的函数形状取的更陡,形式如图3所示。
---e的基本论域为[-100℃,100℃];ec的基本论域为[-5,5];△Kp的基本论域为[-1,1];△Ki的基本论域为[-0.002,0.002];△Kd的基本论域为[-1,1]。以上各变量的模糊量分别为E、EC、△KP、△KI和△KD,其论域均为[-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6]。输入量e、ec的量化因子为:ke=0.06,kec=1.2。
---模糊控制设计是总结工程设计人员的技术知识和实际操作经验,参数的整定规则是控制器的核心,建立合适的模糊规则表,得到针对△Kp、△Ki、△Kd这3个参数分别整定的模糊控制表,见表1、表2和表3。
---对输入的偏差e和偏差变化率ec,在取得相应的语言值后,根据整定规则表,经过公式法模糊决策,分别得出三个修正参数△Kp、△Ki、△Kd的模糊量。经过上述模糊推理后,Fuzzy-PID控制器整定的三个修正参数要进行去模糊化取得精确量,以计算输出控制量,既单位时间加热器通断电百分比。去模糊化有几种方法,如最大隶属度法、重心法等,对本控制器,采用重心法求取输出量的精确值。由以下公式得出模糊判决后的输出量c(k)。
---其中c(k)%26;#215;ku(ku为输出量的比例因子)即为自整定之后的修正参数,各修正参数比例因子为:
---Ku(△Kp)=1/6,Ku(△Ki)=1/300,Ku(△Kd)=1/6
---输入到PID控制器的参数由下列等式计算得出。
---Kp=Kp"+△Kp,Ki=Ki"+△Ki,Kd=Kd"+△Kd
---首先根据模糊数学的理论和方法,将操作人员的调整经验和技术知识总结成为IF(条件)、THEN(结果)形式的模糊规则,并把这些模糊规则及相关信息(如初始的PID参数)存入计算机中。根据检测回路的响应情况,计算出采样时刻的偏差e及偏差的变化率ec,输入控制器,运用模糊推理,进行模糊运算,即可得到该时刻的Kp、Ki、Kd,实现对PID参数的最佳调整。
---Fuzzy-PID控制器是在PID参数预整定的基础上,利用模糊规则实时在线整定PID控制器的三个修正参数△Kp、△Ki、△Kd,实现对温度的优化控制。模糊控制器的输入、输出变量都是精确量,模糊推理是针对模糊量进行的,因此控制器首先要对输入量进行模糊化处理。在所设计的Fuzzy-PID控制器中,输入、输出变量的语言值均分为七个语言值:{NB、NM、NS、O、PS、PM、PB},子集中元素分别代表负大、负中、负小、零、正小、正中和正大。隶属度函数采用灵敏性强的三角函数。为增强系统的鲁棒性,提高隶属度函数的分辨率,在0值附近的函数形状取的更陡,形式如图3所示。
---e的基本论域为[-100℃,100℃];ec的基本论域为[-5,5];△Kp的基本论域为[-1,1];△Ki的基本论域为[-0.002,0.002];△Kd的基本论域为[-1,1]。以上各变量的模糊量分别为E、EC、△KP、△KI和△KD,其论域均为[-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6]。输入量e、ec的量化因子为:ke=0.06,kec=1.2。
---模糊控制设计是总结工程设计人员的技术知识和实际操作经验,参数的整定规则是控制器的核心,建立合适的模糊规则表,得到针对△Kp、△Ki、△Kd这3个参数分别整定的模糊控制表,见表1、表2和表3。
---对输入的偏差e和偏差变化率ec,在取得相应的语言值后,根据整定规则表,经过公式法模糊决策,分别得出三个修正参数△Kp、△Ki、△Kd的模糊量。经过上述模糊推理后,Fuzzy-PID控制器整定的三个修正参数要进行去模糊化取得精确量,以计算输出控制量,既单位时间加热器通断电百分比。去模糊化有几种方法,如最大隶属度法、重心法等,对本控制器,采用重心法求取输出量的精确值。由以下公式得出模糊判决后的输出量c(k)。
---其中c(k)%26;#215;ku(ku为输出量的比例因子)即为自整定之后的修正参数,各修正参数比例因子为:
---Ku(△Kp)=1/6,Ku(△Ki)=1/300,Ku(△Kd)=1/6
---输入到PID控制器的参数由下列等式计算得出。
---Kp=Kp"+△Kp,Ki=Ki"+△Ki,Kd=Kd"+△Kd
 温度控制系统的实现
● 硬件实现
---对于陀螺仪模糊控制系统,考虑其功能需要,对系统的输入和输出功能做分开处理,以确定系统的输入输出口的信号数目。对于系统的输入情况,考虑下列信号。
---(1)温度检测,用于检测系统的输出温度,即陀螺部件内液体的温度,以便对加热器的控制作出决策。
---(2)温度设定,用于设定陀螺部件的工作温度,对不同的要求设定的温度不同。
---对于系统的输出,考虑下列信号。
---(1)加热器控制信号,由可控硅来控制加热器的工作状态。
---(2)向用户显示系统当前的温度。
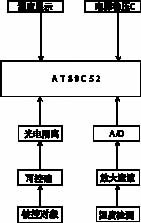
---陀螺仪温控系统的硬件结构图如图4所示。
---控制系统中,采用了高精度集成运放OP07对铂电阻的毫伏级热电势进行差动放大、滤波,然后将检测的电压信号送至模数转换器AD0809,采样数值并传送给AT89C52。
---AT89C52的P0口是数据线,连接到AD0809、LCD的数据口上。P2口的5根控制线控制LCD,P1.0、P1.1控制报警指示灯,P1.2至P1.4口用于控制可控硅等。然后通过Fuzzy-PID控制器,计算得到PWM脉冲的占空比,对加载电压进行控制,最终完成对陀螺部件内液体的温度控制。
● 软件实现
温度控制系统的实现
● 硬件实现
---对于陀螺仪模糊控制系统,考虑其功能需要,对系统的输入和输出功能做分开处理,以确定系统的输入输出口的信号数目。对于系统的输入情况,考虑下列信号。
---(1)温度检测,用于检测系统的输出温度,即陀螺部件内液体的温度,以便对加热器的控制作出决策。
---(2)温度设定,用于设定陀螺部件的工作温度,对不同的要求设定的温度不同。
---对于系统的输出,考虑下列信号。
---(1)加热器控制信号,由可控硅来控制加热器的工作状态。
---(2)向用户显示系统当前的温度。
---陀螺仪温控系统的硬件结构图如图4所示。
---控制系统中,采用了高精度集成运放OP07对铂电阻的毫伏级热电势进行差动放大、滤波,然后将检测的电压信号送至模数转换器AD0809,采样数值并传送给AT89C52。
---AT89C52的P0口是数据线,连接到AD0809、LCD的数据口上。P2口的5根控制线控制LCD,P1.0、P1.1控制报警指示灯,P1.2至P1.4口用于控制可控硅等。然后通过Fuzzy-PID控制器,计算得到PWM脉冲的占空比,对加载电压进行控制,最终完成对陀螺部件内液体的温度控制。
● 软件实现
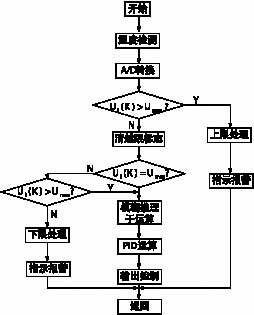 ---陀螺仪温控系统的软件框图如图5所示。在开机复位时,系统进行初始化。接着检测现场温度,并在预热阶段由系统强制加热一段时间。然后再根据检测温度产生输出控制、报警指示、显示等。整个程序主体部分采用汇编语言编写,在控制算法部分调用了C语言编写的函数。系统将整个控制算法作为一个函数以备汇编语言调用。
结束语
---将Fuzzy-PID算法应用于陀螺仪温度控制系统,设计目标是在同样的控制精度条件下,使系统的过渡时间尽可能短,改善控制效果。采用复合控制,使系统能有效抑止纯滞后的影响,而且鲁棒性强,当参数变化较大及有干扰时,仍能取得较好的控制效果。
参考文献
1 李广弟,朱月秀,王秀山.单片机基础.北京航空航天大学出版社. 2001
2 诸静等.模糊控制原理与应用.机械工业出版社. 2003
3 章卫国,杨向忠.模糊控制理论与应用.西北工业大学出版社. 1999
4 胡汉才.单片机原理及系统设计.清华大学出版社. 2002
---陀螺仪温控系统的软件框图如图5所示。在开机复位时,系统进行初始化。接着检测现场温度,并在预热阶段由系统强制加热一段时间。然后再根据检测温度产生输出控制、报警指示、显示等。整个程序主体部分采用汇编语言编写,在控制算法部分调用了C语言编写的函数。系统将整个控制算法作为一个函数以备汇编语言调用。
结束语
---将Fuzzy-PID算法应用于陀螺仪温度控制系统,设计目标是在同样的控制精度条件下,使系统的过渡时间尽可能短,改善控制效果。采用复合控制,使系统能有效抑止纯滞后的影响,而且鲁棒性强,当参数变化较大及有干扰时,仍能取得较好的控制效果。
参考文献
1 李广弟,朱月秀,王秀山.单片机基础.北京航空航天大学出版社. 2001
2 诸静等.模糊控制原理与应用.机械工业出版社. 2003
3 章卫国,杨向忠.模糊控制理论与应用.西北工业大学出版社. 1999
4 胡汉才.单片机原理及系统设计.清华大学出版社. 2002
引用地址:基于Fuzzy-PID的陀螺仪温度控制系统设计
---陀螺仪温度控制系统主要由温度传感器、AT89C52单片机、A/D信号采集模块、可控硅输出控制及其他一些外围电路组成。系统的被控对象是陀螺部件内的液体温度,执行机构是可控硅触发电路。工作温度借助电桥测量。电桥的三个臂是配置在控制系统内的电阻,第四个臂是陀螺部件加热温度传感器的电阻。来自电桥的信号值通过高精度集成运放OP07进行差动放大、滤波,然后再送给A/D采样。根据测量的电流端和电压端原理,电桥电压信号的采集采用三线制接法,如图1所示。这是一种最实用又能较精确测温的方式,R4、R5和R6为连线和接触电阻。由于采用上述三线制接法,调整R1即可使包括R5在内的电桥平衡,而R4可通过R6抵消,因此工业上常用这种接法进行精密温度测量。控制部分采用Fuzzy-PID的复合控制使单片机输出PWM脉冲,进而控制执行机构输出到陀螺加热器的电流量,实现陀螺加热器的温度自动调节控制。由于采用了模糊自适应PID控制算法,系统就可以在没有操作者干预的情况下根据控制系统的实际响应情况,自动实现对PID参数的最佳调整,改变PWM输出波形的占空比,合理地控制输出,使陀螺加热器的工作温度保持恒定,实现自动控制,这也是设计该温控制系统的关键所在。
温度控制系统的设计
---根据陀螺仪模糊控制系统的要求可知,加热器工作时产生热量,使陀螺部件内液体温度升高,进而使温度传感器的阻值增大(对于正温度系数热敏电阻),则温度检测电路把温度变化信号送回输入端和给定的温度进行比较,再产生偏差、偏差变化率信号,经模糊控制器进行推理从而产生控制加热器的信号,对加热器进行控制。Fuzzy-PID温度控制系统的结构框图如图2所示。系统主要由被控对象、温度传感器检测回路、Fuzzy-PID控制器和执行机构等组成。
● 数字PID控制设计
---利用脉冲响应法测量被控对象的传递函数为一阶惯性环节加纯滞后。
---其中,K为对象放大系数,K=300℃/100V;τ为纯滞后时间,τ=50s;T为对象时间常数,T=200s。
---单片机控制是一种采样控制,系统采用的增量式数字PID控制算法为:
---Δu(n)=U(n)-U(n-1)=a0e(n)-a1e(n-1)+a2e(n-2)
---a0=kp(1+T/T1+TD/T)
---a1=kp(1+2TD/T)
---a2=kpTD/T
---式中,T为采样周期。参照响应曲线选择,最后结合实验确定为采样周期。利用控制软件实现增量式控制算法,并输出控制量。由于该控制算法不需要累加,控制增量仅与最近的n次采样有关,所以误动作时影响小,而且较容易通过加权处理获得比较好的控制效果。这也是系统采用此增量式PID控制算法,作为模糊PID控制器中PID调节器部分算法的主要理由。
● 模糊PID控制器设计
---首先根据模糊数学的理论和方法,将操作人员的调整经验和技术知识总结成为IF(条件)、THEN(结果)形式的模糊规则,并把这些模糊规则及相关信息(如初始的PID参数)存入计算机中。根据检测回路的响应情况,计算出采样时刻的偏差e及偏差的变化率ec,输入控制器,运用模糊推理,进行模糊运算,即可得到该时刻的Kp、Ki、Kd,实现对PID参数的最佳调整。
---Fuzzy-PID控制器是在PID参数预整定的基础上,利用模糊规则实时在线整定PID控制器的三个修正参数△Kp、△Ki、△Kd,实现对温度的优化控制。模糊控制器的输入、输出变量都是精确量,模糊推理是针对模糊量进行的,因此控制器首先要对输入量进行模糊化处理。在所设计的Fuzzy-PID控制器中,输入、输出变量的语言值均分为七个语言值:{NB、NM、NS、O、PS、PM、PB},子集中元素分别代表负大、负中、负小、零、正小、正中和正大。隶属度函数采用灵敏性强的三角函数。为增强系统的鲁棒性,提高隶属度函数的分辨率,在0值附近的函数形状取的更陡,形式如图3所示。
---e的基本论域为[-100℃,100℃];ec的基本论域为[-5,5];△Kp的基本论域为[-1,1];△Ki的基本论域为[-0.002,0.002];△Kd的基本论域为[-1,1]。以上各变量的模糊量分别为E、EC、△KP、△KI和△KD,其论域均为[-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6]。输入量e、ec的量化因子为:ke=0.06,kec=1.2。
---模糊控制设计是总结工程设计人员的技术知识和实际操作经验,参数的整定规则是控制器的核心,建立合适的模糊规则表,得到针对△Kp、△Ki、△Kd这3个参数分别整定的模糊控制表,见表1、表2和表3。
---对输入的偏差e和偏差变化率ec,在取得相应的语言值后,根据整定规则表,经过公式法模糊决策,分别得出三个修正参数△Kp、△Ki、△Kd的模糊量。经过上述模糊推理后,Fuzzy-PID控制器整定的三个修正参数要进行去模糊化取得精确量,以计算输出控制量,既单位时间加热器通断电百分比。去模糊化有几种方法,如最大隶属度法、重心法等,对本控制器,采用重心法求取输出量的精确值。由以下公式得出模糊判决后的输出量c(k)。
---其中c(k)%26;#215;ku(ku为输出量的比例因子)即为自整定之后的修正参数,各修正参数比例因子为:
---Ku(△Kp)=1/6,Ku(△Ki)=1/300,Ku(△Kd)=1/6
---输入到PID控制器的参数由下列等式计算得出。
---Kp=Kp"+△Kp,Ki=Ki"+△Ki,Kd=Kd"+△Kd
温度控制系统的实现
● 硬件实现
---对于陀螺仪模糊控制系统,考虑其功能需要,对系统的输入和输出功能做分开处理,以确定系统的输入输出口的信号数目。对于系统的输入情况,考虑下列信号。
---(1)温度检测,用于检测系统的输出温度,即陀螺部件内液体的温度,以便对加热器的控制作出决策。
---(2)温度设定,用于设定陀螺部件的工作温度,对不同的要求设定的温度不同。
---对于系统的输出,考虑下列信号。
---(1)加热器控制信号,由可控硅来控制加热器的工作状态。
---(2)向用户显示系统当前的温度。
---陀螺仪温控系统的硬件结构图如图4所示。
---控制系统中,采用了高精度集成运放OP07对铂电阻的毫伏级热电势进行差动放大、滤波,然后将检测的电压信号送至模数转换器AD0809,采样数值并传送给AT89C52。
---AT89C52的P0口是数据线,连接到AD0809、LCD的数据口上。P2口的5根控制线控制LCD,P1.0、P1.1控制报警指示灯,P1.2至P1.4口用于控制可控硅等。然后通过Fuzzy-PID控制器,计算得到PWM脉冲的占空比,对加载电压进行控制,最终完成对陀螺部件内液体的温度控制。
● 软件实现
---陀螺仪温控系统的软件框图如图5所示。在开机复位时,系统进行初始化。接着检测现场温度,并在预热阶段由系统强制加热一段时间。然后再根据检测温度产生输出控制、报警指示、显示等。整个程序主体部分采用汇编语言编写,在控制算法部分调用了C语言编写的函数。系统将整个控制算法作为一个函数以备汇编语言调用。
结束语
---将Fuzzy-PID算法应用于陀螺仪温度控制系统,设计目标是在同样的控制精度条件下,使系统的过渡时间尽可能短,改善控制效果。采用复合控制,使系统能有效抑止纯滞后的影响,而且鲁棒性强,当参数变化较大及有干扰时,仍能取得较好的控制效果。
参考文献
1 李广弟,朱月秀,王秀山.单片机基础.北京航空航天大学出版社. 2001
2 诸静等.模糊控制原理与应用.机械工业出版社. 2003
3 章卫国,杨向忠.模糊控制理论与应用.西北工业大学出版社. 1999
4 胡汉才.单片机原理及系统设计.清华大学出版社. 2002
上一篇:ET21X110A影像传感器的原理与应用
下一篇:工业Ethernet在远程实时控制系统中的具体应用
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 3551J
3551J










 京公网安备 11010802033920号
京公网安备 11010802033920号