对于机器人的寻线行走,除了要求精确之外,机器人寻线速度要求也明显提高,速度往往成为某些比赛制胜的关键。在最近教育部推出的全国大学生智能汽车大赛中,更是将寻线速度定为比赛的主题。本文对此类赛事进行了相关总结,提出了一种将单片机作为核心控制器,利用低分辨率摄像头代替通用光电传感器的机器人高速寻线行走机构设计方法。
核心控制器设计
为了实现视频采集,考虑综合性价比、设备安装等因素,核心控制器选用Freescale公司的16位高性能单片机—— MC9S12DG128(以下简称S12)。它的指令处理时钟可以达到38MHz,其A/D转换器的工作时钟可以达到16MHz,用于采集视频。同时它拥有8路PWM通道,控制舵机和直流电机完成转向和速度控制;8路捕捉/比较通道获取作为速度传感器的编码器脉冲信号;串行通信接口用于无线调试;多达64 个IO(通过IO复用方式)足够用于状态显示及参数设置。另外,其拥有128k的flash存储空间,无需进行存储器扩展,在片内就可以实现视频数据存储和调用。如图2所示,整个系统采用一块单片机,无需添加其他控制器、存储器,成为真正的“单片”系统。
视频采集模块
由于单片机A/D速度限制,需要选用低分辨率的黑白摄像头。因为低分辨率意味着视频单行扫描时间的增加,而黑白摄像头意味着只需要单路A/D就可以完成视频采集工作。选择了Omvision生产的ov5116芯片为内核的CMOS黑白摄像头,分辨率为320×240,图像刷新频率50Hz。同时选用LM1881视频同步信号分离芯片提取视频信号中的行同步和场同步信号,连入s12的脉冲捕捉通道。通过捕捉信号触发AD模块工作,采集存储视频数据。
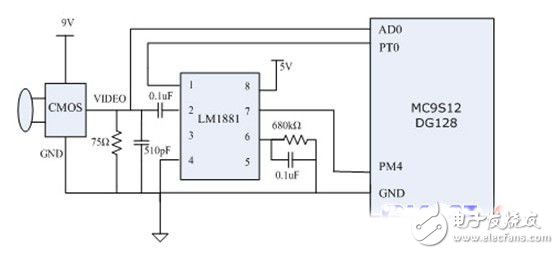
图3 视频采集电路原理图
电机控制及电源
RS-380SH直流电机作为主驱动电机,通过PWM信号控制。选用Freescale公司的MC33886全桥驱动芯片,通过两路半桥实现电机正反转。这里的电机反转并不为实现倒车,而主要用于车体减速。在进行电机正反转切换时,电机驱动电流会随着负载增大而瞬间放大,因此需要增大稳压能力,保证系统正常工作电压,避免单片机自动重启。在整个系统中,有多种电压需求,单片机和舵机为5V供电;CMOS摄像头为 6~9V。因此,为了方便开发,这里选用最常用的7.2V充电电池组。只需在系统内加入5V稳压芯片,提供5V电压。
本文设计了一个基于视觉的以高速寻线为目的的行走机器人系统。系统采用一块高性能单片机,完成了从视频采集到视频处理,最终实现速度和转向控制的一套寻线行走功能。系统轻便灵巧,无需存储器扩展和其他可编程器件配合,搭建费用低。该方案在参加第一届全国大学生智能车大赛中,系统运行平稳,取得了非常优异的成绩。
关键字:电路设计 机器人 视觉
编辑:探路者 引用地址:智能视觉高速寻线机器人导航系统电路设计
推荐阅读最新更新时间:2023-10-12 22:51
英国正在研发可以在野外条件下自主工作的草莓采集机器人
草莓和奶油是典型的英国夏季美食,草莓酱、奶油茶都深受英国人喜爱。然而最近有报道称,英国正面临着草莓劳动力的问题。而这样的境况可能会随着英国明年脱欧而有所加剧。
英国过去每年种植的软果量会增加超过1.15亿吨,价值11亿英镑(14亿美元),在过去十年中增长了132%,产量惊人。为了种植和收获作物,英国每年都会雇用大约18000名季节性工人。在上一代,这些工人大多数都来自欧洲大陆,其中主要来自罗马尼亚和保加利亚,但近年这些国家的失业率下降导致英国的劳动力短缺,据估计可能会超过20%的农作物遭受损失。
根据之前英国的脱欧提案和公投结果,2019年3月底,英国会正式脱离欧盟。毫无疑问,劳动力短缺的现象会更加严重。为应
[机器人]
“机器换人”的经济性逐渐凸显,国产工业机器人崛起和行业问题
前言: 自2013年开始,我国成为全球最大的机器人市场,连续六年居全球首位。我国已成为全球机器人重要的生产基地与消费市场。 作者 | 方文 全球运作中工业机器人创新高 根据国际机器人联盟IFR2019年统计,全球工厂内运作中的工业机器人达270万台,年增12%,是最高历史纪录。 从区域来看,2019年最大市场是亚洲。其中,国内运作中的工业机器人年增21%,约78.3万台;日本运作中的工业机器人数量为35.5万。 2019年工业机器人出货量37.3万台,以国别出货量来看,中国出货14.5万台为首位,日本4.9万台为第2名,美国3.33万台为第3名。 国内工业机器人出货量之中,安川电机、发那科、ABB、KUKA等四大机器人厂就合占7
[机器人]
工业4.0时代 工业机器人的应用现拐点
中国人口红利拐点以及“工业4.0”时代的加速来临,使得以机器人为代表的智能装备产业正在迎来前所未有的发展机遇。根植于中国作为制造大国的土壤,成长于中国工业制造产业向智能化转型升级的巨大空间,机器人产业景气度在未来数年内有望持续高企。 中国机器人产业的迅猛发展,一方面与劳动力成本增加有必然联系,另一方面则是工业化发展到一定阶段的必然产物。中国经过30多年的工业化进程,产业的配套能力显著增强,产业基础十分雄厚。在机器人等产业的带动下,加速传统产业的转型升级,将带来一场新的产业变革。业内专家介绍,“工业4.0”战略的核心就是实现人、设备与产品的实时联通、相互识别和有效交流,从而构建一个高度灵活的个性化和数字化的智能制造模式。在这
[机器人]
机器人助力物流仓库快速存取货物 重塑物流商业竞争格局
随着商务的快速发展和物流行业自动化的应用普及,物流移动机器人市场持续放大成为最近一个热门的话题。近年来,物流仓库正在经历一场巨大的变革,新一代机器人产品将重新定义商业格局,并带来新的增长机遇。
目前,、沃尔玛、阿里、京东等电商巨头都在推动仓库智能化的升级,物流领域移动机器人能够帮助仓库提升效率和减少人力成本的投入,可以让在线购物者获到更快速的交付体验,逐渐受到了市场的欢迎,预计未来几年移动机器人厂商将获得丰厚的收入。
前几个月,移动机器人初创公司IAM Robocs获得了2000万美元投资,这笔资金将加速其机器人的生产,并帮助建立销售团队,公司计划进一步扩展其移动机器人Swift的部署。IAM RoboTIcs位
[机器人]
详读工业机器人的四大类细分条件
所谓,工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业机器人按臂部的运动形式分为四种。直角坐标型的臂部可
[机器人]
AI架起人车沟通桥梁 本田推出全自动多功能移动机器人
正在举行的东京汽车展上,本田推出了概念电动车Sports EV Concept和概念产品RoboCas Concept,它们的共同点是都有双呆萌的动态大眼睛(anime-esque eyes),配备了全自动化的AI助手“Honda Automated Network Assistant”。 本田拥抱电气化时代,并且希望借助AI技术架起人车沟通的桥梁,Sports EV Concept一看就是电动车,然而RoboCas Concept更像是一款具备AI及全自动驾驶的多功能移动机器人,样子有点像《机器人总动员》瓦力(Wall-E)。 本田的官方介绍有点让人云里雾里:RoboCas是一款小巧的电子移动产品,为了让每个人的想法和梦想成为
[机器人]
达芬奇不再是一枝独秀 手术机器人发展越来越好
1999年,首台达芬奇手术机器人问世,迄今过了20年。
达芬奇手术机器人并非万能,主要应用在心脏、胸、泌尿、妇科、结直肠、儿科和普通外科等学科,但在这20年间的巨大成功使其成为了手术机器人的代名词。
全球66个国家及地区部署了超过5000台达芬奇手术机器人,每30秒就有一位主刀医生利用达芬奇手术机器人开展一例手术。迄今,达芬奇机器人已经在全球完成了600多万例手术。其中,仅2018年就进行了100万例。
研发达芬奇手术机器人的直观手术(Intuive Surgical)市值高达600亿美元,看上去无法撼动。尽管如此,美敦力、强生、、史赛克等全球医疗器械10强大佬们仍然在2019年前赴后继进入了这个领域。根据
[机器人]
机器视觉开发过程中的各种bug总结
入坑机器视觉后,发现在开发与使用过程中总有各种bug导致系统的不稳定,故总结之,以此为鉴,谨记勿犯! 设定明确的边界条件 机器视觉或者说现在的人工智能,还没有做到完全的智能,所以在生产实践中更好的方法是在特定的条件下开发特定的算法,将算法框定在一个明确的范围内时,那么算法将变的更加robust,否则脆弱不堪,应用某visioner的话,这样的算法非常weak。在此基础上,小心迭代扩大算法的适用场景与范围是明智之举。设计算法不考虑特定应用场景、没有明确边界条件、没有前提假设,这是新手常犯的错误,避之免之。 赋予任何参数以明确的物理意义 由于机器视觉的处理结果与实际物理环境紧密相连,参数作为设计算法时的重要变量,一定要赋予实际
[嵌入式]
 电子工艺实训基础
电子工艺实训基础 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用












 京公网安备 11010802033920号
京公网安备 11010802033920号