摘要:介绍单相全桥逆变器的工作原理,阐述产生SPWM波和实现PI控制的算法,给出以DSP(数字信号处理器)实现控制的软件流程。实验表明利用软件完成逆变器控制是可行的。
关键词:正弦逆变器;控制;SPWM;PI;DSP
目前,正弦逆变器的控制通常采用模拟电路或数字电路实现。由于硬件的固有缺点和不能实施先进的控制策略,致使逆变器的性能不能极大的提高。随着高速微处理器的问世,特别是具有高速运算、处理和控制能力的DSP的出现,使得对正弦逆变器采用新的控制方法成为可能。文中将重点介绍采用DSP实现正弦逆变器控制的方法。
图1
1 全桥正弦逆变器
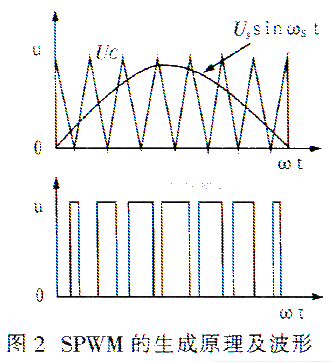 图1示出单相全桥逆变器的原理电路及波形。其中H桥和滤波电路完成直流到交流的变换,滤去谐波,获得交流电;控制电路完成对H桥中开关管的控制,并使输出交流电的电压、频率和波形稳定。
SPWM的生成原理及波形如图2所示。由于采用正弦波调制波(Ussintωst)与三角波载波(幅值为Uc的正三角波,频率为ωc)相交来获得SPWM波,因此,基波频率为调制波的频率,基波幅值与调制比M(M=Us/Uc)成正比关系,谐波含量少。正弦逆变器常采用SPWM控制,利用调制波控制输出波形频率,调整M来控制输出电压幅值。
工作时,H桥中Vl、V4在前半周期内以图2中的SPWM信号闭合,V2、V3断开;在后半周期内V1、V4断开,V2、V3以SPWM信号闭合。故在整个周期内H桥输出波形如图1(b)所示。这样,对该波形进行滤波,即可获得频率为ωs。,幅值正比M与调制比M的正弦交流电。
2 H桥控制方案和信号的数字化
图1示出单相全桥逆变器的原理电路及波形。其中H桥和滤波电路完成直流到交流的变换,滤去谐波,获得交流电;控制电路完成对H桥中开关管的控制,并使输出交流电的电压、频率和波形稳定。
SPWM的生成原理及波形如图2所示。由于采用正弦波调制波(Ussintωst)与三角波载波(幅值为Uc的正三角波,频率为ωc)相交来获得SPWM波,因此,基波频率为调制波的频率,基波幅值与调制比M(M=Us/Uc)成正比关系,谐波含量少。正弦逆变器常采用SPWM控制,利用调制波控制输出波形频率,调整M来控制输出电压幅值。
工作时,H桥中Vl、V4在前半周期内以图2中的SPWM信号闭合,V2、V3断开;在后半周期内V1、V4断开,V2、V3以SPWM信号闭合。故在整个周期内H桥输出波形如图1(b)所示。这样,对该波形进行滤波,即可获得频率为ωs。,幅值正比M与调制比M的正弦交流电。
2 H桥控制方案和信号的数字化
 2.1 控制方案
对逆变器的控制主要包括对SPWM的控制(即H桥开关管开关方式)和对SPWM脉宽的控制(即调整M,使输出电压稳定的反馈控制,一般采用平均电压控制技术,即PI控制)二部分。
SPWM的控制方式可分为单极性和双极性二种。在传统的单极性或双极性控制方式中,开关管均工作在高频条件下,这样虽然可以得到较理想的正弦输出电压波形,但也产生了较大的开关损耗,且频率越高,损耗越大。
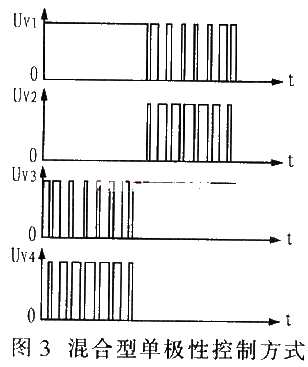
图3所示的混合型单极性控制方式(HSPWM UVI~Uv4)波形分别对应图1(a)中V1~V4.开关管的驱动信号)可较好地解决这一矛盾,既能得到理想的正弦波形,又能适当地减小开关损耗。在这种工作方式下.工作在较高开关频率的2只功率管互补导通,得到理想的正弦波形,另外2只功率管工作在输出基波频率条件下,从而减小了开关损耗。
2.2 SPWM波生成数字化
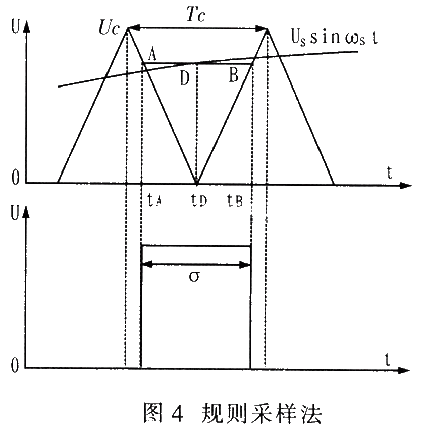
图4示出采用三角波作为载波的规则采样获得的SPWM波,在三角波零峰tD时刻对正弦调制波采样得到D点,过D点作水平直线与三角波分别交于A点和B点,在A点的时刻tA和B点的时刻b间输出高电平,其他时刻输出低电平。根据三角关系,可以得出
2.1 控制方案
对逆变器的控制主要包括对SPWM的控制(即H桥开关管开关方式)和对SPWM脉宽的控制(即调整M,使输出电压稳定的反馈控制,一般采用平均电压控制技术,即PI控制)二部分。
SPWM的控制方式可分为单极性和双极性二种。在传统的单极性或双极性控制方式中,开关管均工作在高频条件下,这样虽然可以得到较理想的正弦输出电压波形,但也产生了较大的开关损耗,且频率越高,损耗越大。
图3所示的混合型单极性控制方式(HSPWM UVI~Uv4)波形分别对应图1(a)中V1~V4.开关管的驱动信号)可较好地解决这一矛盾,既能得到理想的正弦波形,又能适当地减小开关损耗。在这种工作方式下.工作在较高开关频率的2只功率管互补导通,得到理想的正弦波形,另外2只功率管工作在输出基波频率条件下,从而减小了开关损耗。
2.2 SPWM波生成数字化
图4示出采用三角波作为载波的规则采样获得的SPWM波,在三角波零峰tD时刻对正弦调制波采样得到D点,过D点作水平直线与三角波分别交于A点和B点,在A点的时刻tA和B点的时刻b间输出高电平,其他时刻输出低电平。根据三角关系,可以得出
 其中σ为脉冲宽度。
逆变器控制信号中,调制波和载波频率一定,tD时刻为n倍三角波周期(n=1,2,…,N。N=Ts/Tc,N为载波比,E为正弦波周期),如果一个周期内有Ⅳ个矩形波.则第n个矩形波的占空比D为:
其中σ为脉冲宽度。
逆变器控制信号中,调制波和载波频率一定,tD时刻为n倍三角波周期(n=1,2,…,N。N=Ts/Tc,N为载波比,E为正弦波周期),如果一个周期内有Ⅳ个矩形波.则第n个矩形波的占空比D为:
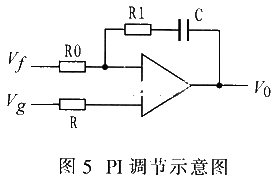
 2.3 PI调节器数字化
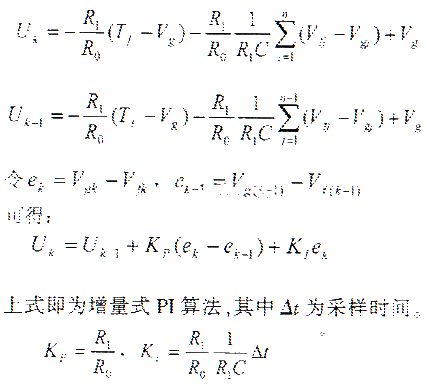
图5为模拟PI调节示意图,可以计算出
2.3 PI调节器数字化
图5为模拟PI调节示意图,可以计算出
 离散化后整理可得:
离散化后整理可得:
 3 基于DSP的控制软件
实现逆变器控制主要依靠DSP的事件管理模块和A/D转换模块。事件管理模块由通用定时器f提供时间基准)、非对称/对称波形发生器、可编程的死区发生单元、输出逻辑控制单元等组成,以实现SPWM波。A/D转换模块采样输人的平均电压并转换为数字信号。
3 基于DSP的控制软件
实现逆变器控制主要依靠DSP的事件管理模块和A/D转换模块。事件管理模块由通用定时器f提供时间基准)、非对称/对称波形发生器、可编程的死区发生单元、输出逻辑控制单元等组成,以实现SPWM波。A/D转换模块采样输人的平均电压并转换为数字信号。
 3.1 HSPWM控制方式软件实现
如图4所示,SPWM波是用三角波和正弦波相交比较而得到的。采用DSP产生SPWM波的设置如下:
三角波的获得是将事件管理器计数模式设置为连续增减计数,
3.1 HSPWM控制方式软件实现
如图4所示,SPWM波是用三角波和正弦波相交比较而得到的。采用DSP产生SPWM波的设置如下:
三角波的获得是将事件管理器计数模式设置为连续增减计数,
 其计数从0增到TxPR再减到0,其周期为2TxPR,即载波的周期为2TxPR。由于正弦波采用在线计算会影响运行速度,所以采用离线计算方法。在程序开始时.按照规则采样法计算nTe处的正弦值(即三角波和正弦波比较点的值),并存于数组中,需要时通过中断调用该值。
SPWM波的获得是在DSP事件管理器的比较单元工作时,通用定时器的计数器TxCNI’的值与比较寄存器CMPRx的值不断进行比较。当二者匹配时,PWM电路按照输出逻辑输出二路极性相反的PWM波。在逆变器控制中,载波比固定,半个周期内输出的脉冲个数、占空比固定,TxPR值固定,形成SPWM正弦波的CMPRx的值为TxPRMsinomTc(即图4中D点正弦值),所以,在计数器计数最大时(TxCNll-TxPR,即三角波凸点处)中断.更新CMPRx的值,就可以输出SPWM。
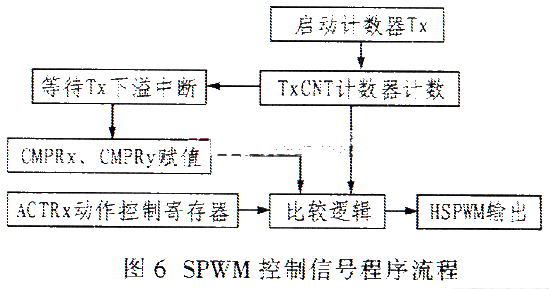
在图3中HSPWM控制信号Uvi与Uv2、Uv3与Uv4极性相反。在DSP中只需要两个全比较单元。如UV1与UV2控制信号,在前半周期,CMPRx设置为0,则输出相对应的高、低电平控制信号,在后半周期,利用中断更新CMPRx的值即可获得图3所示的UVI与Uv2控制信号UV3与UⅥ控制信号。同理可获得。产生HSPWM控制信号的软件流程如图6所示。
3.2 PI算法的软件
采用平均电压反馈的逆变器,需要采样输出电压的平均值。电压采样值低于3.3V可直接输入DSP的A/D通道进行转换以获得Vf(k),再确定Kp和K1即可。
其计数从0增到TxPR再减到0,其周期为2TxPR,即载波的周期为2TxPR。由于正弦波采用在线计算会影响运行速度,所以采用离线计算方法。在程序开始时.按照规则采样法计算nTe处的正弦值(即三角波和正弦波比较点的值),并存于数组中,需要时通过中断调用该值。
SPWM波的获得是在DSP事件管理器的比较单元工作时,通用定时器的计数器TxCNI’的值与比较寄存器CMPRx的值不断进行比较。当二者匹配时,PWM电路按照输出逻辑输出二路极性相反的PWM波。在逆变器控制中,载波比固定,半个周期内输出的脉冲个数、占空比固定,TxPR值固定,形成SPWM正弦波的CMPRx的值为TxPRMsinomTc(即图4中D点正弦值),所以,在计数器计数最大时(TxCNll-TxPR,即三角波凸点处)中断.更新CMPRx的值,就可以输出SPWM。
在图3中HSPWM控制信号Uvi与Uv2、Uv3与Uv4极性相反。在DSP中只需要两个全比较单元。如UV1与UV2控制信号,在前半周期,CMPRx设置为0,则输出相对应的高、低电平控制信号,在后半周期,利用中断更新CMPRx的值即可获得图3所示的UVI与Uv2控制信号UV3与UⅥ控制信号。同理可获得。产生HSPWM控制信号的软件流程如图6所示。
3.2 PI算法的软件
采用平均电压反馈的逆变器,需要采样输出电压的平均值。电压采样值低于3.3V可直接输入DSP的A/D通道进行转换以获得Vf(k),再确定Kp和K1即可。
 在实际应用中,还需对PI调节器加以限制.当偏差值输入较大时,输出值会很大,可能会使输出饱和,这样对开关管有很大的冲击,而且会导致系统不稳定。所以需要对PI调节器的输出限幅,即当I u(k)
|>umax时,令u=umax或u=umin。
另外,PI控制器中积分环节的目的主要是消除静差、提高精度。但在电压大幅度变化如启动、结束时,在短时间内系统输出有很大的偏差.会造成PI运算的积分积累,从而引起较大的超调.导致系统的振荡。根据实际情况,设定阈值δ>0。当le(k)I>δ时.
图7
采用P控制,这样可避免过大的超调,而且保持较快的响应速度。当le(k)|≤ω时,采用PI控制,可保证系统的控制精度。具体程序流程如图7所示。
在实际应用中,还需对PI调节器加以限制.当偏差值输入较大时,输出值会很大,可能会使输出饱和,这样对开关管有很大的冲击,而且会导致系统不稳定。所以需要对PI调节器的输出限幅,即当I u(k)
|>umax时,令u=umax或u=umin。
另外,PI控制器中积分环节的目的主要是消除静差、提高精度。但在电压大幅度变化如启动、结束时,在短时间内系统输出有很大的偏差.会造成PI运算的积分积累,从而引起较大的超调.导致系统的振荡。根据实际情况,设定阈值δ>0。当le(k)I>δ时.
图7
采用P控制,这样可避免过大的超调,而且保持较快的响应速度。当le(k)|≤ω时,采用PI控制,可保证系统的控制精度。具体程序流程如图7所示。
 4 实验及结论
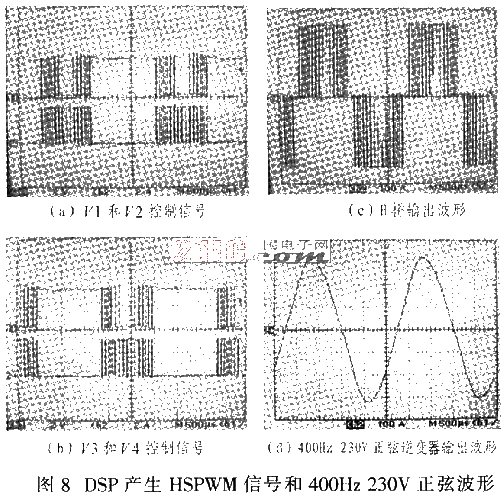
以DSP控制4kW、230V、400Hz逆变器时的各部分波形如图8所示。实验结果表明,基于DSP控制的逆变器可以满足要求。
4 实验及结论
以DSP控制4kW、230V、400Hz逆变器时的各部分波形如图8所示。实验结果表明,基于DSP控制的逆变器可以满足要求。
编辑: 引用地址:正弦逆变器控制软件设计
图1示出单相全桥逆变器的原理电路及波形。其中H桥和滤波电路完成直流到交流的变换,滤去谐波,获得交流电;控制电路完成对H桥中开关管的控制,并使输出交流电的电压、频率和波形稳定。
SPWM的生成原理及波形如图2所示。由于采用正弦波调制波(Ussintωst)与三角波载波(幅值为Uc的正三角波,频率为ωc)相交来获得SPWM波,因此,基波频率为调制波的频率,基波幅值与调制比M(M=Us/Uc)成正比关系,谐波含量少。正弦逆变器常采用SPWM控制,利用调制波控制输出波形频率,调整M来控制输出电压幅值。
工作时,H桥中Vl、V4在前半周期内以图2中的SPWM信号闭合,V2、V3断开;在后半周期内V1、V4断开,V2、V3以SPWM信号闭合。故在整个周期内H桥输出波形如图1(b)所示。这样,对该波形进行滤波,即可获得频率为ωs。,幅值正比M与调制比M的正弦交流电。
2 H桥控制方案和信号的数字化
2.1 控制方案
对逆变器的控制主要包括对SPWM的控制(即H桥开关管开关方式)和对SPWM脉宽的控制(即调整M,使输出电压稳定的反馈控制,一般采用平均电压控制技术,即PI控制)二部分。
SPWM的控制方式可分为单极性和双极性二种。在传统的单极性或双极性控制方式中,开关管均工作在高频条件下,这样虽然可以得到较理想的正弦输出电压波形,但也产生了较大的开关损耗,且频率越高,损耗越大。
图3所示的混合型单极性控制方式(HSPWM UVI~Uv4)波形分别对应图1(a)中V1~V4.开关管的驱动信号)可较好地解决这一矛盾,既能得到理想的正弦波形,又能适当地减小开关损耗。在这种工作方式下.工作在较高开关频率的2只功率管互补导通,得到理想的正弦波形,另外2只功率管工作在输出基波频率条件下,从而减小了开关损耗。
2.2 SPWM波生成数字化
图4示出采用三角波作为载波的规则采样获得的SPWM波,在三角波零峰tD时刻对正弦调制波采样得到D点,过D点作水平直线与三角波分别交于A点和B点,在A点的时刻tA和B点的时刻b间输出高电平,其他时刻输出低电平。根据三角关系,可以得出
其中σ为脉冲宽度。
逆变器控制信号中,调制波和载波频率一定,tD时刻为n倍三角波周期(n=1,2,…,N。N=Ts/Tc,N为载波比,E为正弦波周期),如果一个周期内有Ⅳ个矩形波.则第n个矩形波的占空比D为:
2.3 PI调节器数字化
图5为模拟PI调节示意图,可以计算出
离散化后整理可得:
3 基于DSP的控制软件
实现逆变器控制主要依靠DSP的事件管理模块和A/D转换模块。事件管理模块由通用定时器f提供时间基准)、非对称/对称波形发生器、可编程的死区发生单元、输出逻辑控制单元等组成,以实现SPWM波。A/D转换模块采样输人的平均电压并转换为数字信号。
3.1 HSPWM控制方式软件实现
如图4所示,SPWM波是用三角波和正弦波相交比较而得到的。采用DSP产生SPWM波的设置如下:
三角波的获得是将事件管理器计数模式设置为连续增减计数,
其计数从0增到TxPR再减到0,其周期为2TxPR,即载波的周期为2TxPR。由于正弦波采用在线计算会影响运行速度,所以采用离线计算方法。在程序开始时.按照规则采样法计算nTe处的正弦值(即三角波和正弦波比较点的值),并存于数组中,需要时通过中断调用该值。
SPWM波的获得是在DSP事件管理器的比较单元工作时,通用定时器的计数器TxCNI’的值与比较寄存器CMPRx的值不断进行比较。当二者匹配时,PWM电路按照输出逻辑输出二路极性相反的PWM波。在逆变器控制中,载波比固定,半个周期内输出的脉冲个数、占空比固定,TxPR值固定,形成SPWM正弦波的CMPRx的值为TxPRMsinomTc(即图4中D点正弦值),所以,在计数器计数最大时(TxCNll-TxPR,即三角波凸点处)中断.更新CMPRx的值,就可以输出SPWM。
在图3中HSPWM控制信号Uvi与Uv2、Uv3与Uv4极性相反。在DSP中只需要两个全比较单元。如UV1与UV2控制信号,在前半周期,CMPRx设置为0,则输出相对应的高、低电平控制信号,在后半周期,利用中断更新CMPRx的值即可获得图3所示的UVI与Uv2控制信号UV3与UⅥ控制信号。同理可获得。产生HSPWM控制信号的软件流程如图6所示。
3.2 PI算法的软件
采用平均电压反馈的逆变器,需要采样输出电压的平均值。电压采样值低于3.3V可直接输入DSP的A/D通道进行转换以获得Vf(k),再确定Kp和K1即可。
在实际应用中,还需对PI调节器加以限制.当偏差值输入较大时,输出值会很大,可能会使输出饱和,这样对开关管有很大的冲击,而且会导致系统不稳定。所以需要对PI调节器的输出限幅,即当I u(k)
|>umax时,令u=umax或u=umin。
另外,PI控制器中积分环节的目的主要是消除静差、提高精度。但在电压大幅度变化如启动、结束时,在短时间内系统输出有很大的偏差.会造成PI运算的积分积累,从而引起较大的超调.导致系统的振荡。根据实际情况,设定阈值δ>0。当le(k)I>δ时.
图7
采用P控制,这样可避免过大的超调,而且保持较快的响应速度。当le(k)|≤ω时,采用PI控制,可保证系统的控制精度。具体程序流程如图7所示。
4 实验及结论
以DSP控制4kW、230V、400Hz逆变器时的各部分波形如图8所示。实验结果表明,基于DSP控制的逆变器可以满足要求。
上一篇:基于交流永磁同步电机的全数字伺服控制系统
下一篇:混合逻辑电平的接口技术
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 RC4136-W
RC4136-W
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号