0 引言
近年来,道路交通量急剧增加,城市道路问题已经成为现代城市迫切需要解决的重要问题之一,合理的控制策略能够提高交叉口的通行能力,对于一些交通流量较小,但随机波动较大的路口,宜采用感应控制。
经典的感应控制采用车来即延时的策略,根据经验设定固定的初始绿灯时间、单位绿灯延长时间、最大绿灯时间等参数,控制策略单一,很难适应动态的交通流状况。为了达到比较理想的控制效果,一些学者对感应控制的配时进行了深入研究,翟润平等就对延时策略进行了改进,通过计算绿时有效利用率来确定是否切换相位,提高了绿灯的有效利用率,但是增加了一个控制参数和控制的复杂度;王殿海等提出了一种可变单位绿灯延时的时间模型,考虑到了城市路段车流到达规律和驾驶员心理特性,比传统的固定单位绿灯延时有所改进,但是在降低车辆的平均延误上效果并不明显;邵峰等对两种单位绿灯延时的计算方法进行了比较,得到了一种减少车辆平均延误的单位绿灯延时的计算方法,但是其计算参数过多,计算复杂,实用性不强。上述研究皆对感应控制的部分配时参数进行了研究,但都采用固定周期、固定相序的方式。文献均考虑到了相序对交叉口通行能力的影响,对不同的交叉口采用不同的相序方案,但是没有考虑交叉口的车流量变化对相序的影响;沈国江等提出了一种交通流模型,根据排队长度的变化,采用模糊推理对相序转换时刻、相序的选择进行了优化,由于采用了八相位方案,算法复杂度较高,调节参数多,实时性和可靠性得不到保证,并且增加了绿灯损失时间;樊晓平等结合了模糊控制和神经网络控制的优点,实现了交叉口多相位的、相序可变的交通流控制,但是该方法对信号机系统的配置要求比较高,较难推广应用。
本文对交通感应控制中的信号配时进行了研究,提出一种动态相序的多相位感应控制算法,分析了初始绿灯时间、单位绿灯延长时间、最小和最大绿灯时间等对感应控制的影响,并给出了上述参数配时的计箕方法。本文所提算法简单实用,计算复杂度低,对系统配置要求不高,仿真结果表明,本文的方法较经典感应控制方法降低了交叉口的平均延误,是一种有效可行的方法。
1 感应控制原理概述
感应控制是通过车辆检测器检测到的车辆到达情况,动态调整各相位的配时以适应交通变化的一种实时控制方式,是一种典型的反馈控制过程,适用于交通流量不大但波动较大的交叉口控制。
传统的感应控制方式可分为半感应控制和全感应控制。在半感应控制中,检测器只安装在次干道上,主干道维持绿灯状态,当次干道检测到有车到达并且主干道最小绿时已经结束时,更换信号相位;而全感应控制中,主从干道无法明显地区分,交叉口的所有进口道上都安装检测器,其工作方式为:当某一信号相位开始启亮绿灯时,则预设一个“初始绿灯时间”,当初始绿灯时间结束时,再增加一个预置的时间间隔(一般为一个单位绿灯延长时间),在此时间间隔内,若没有后续车辆到达,则立即更换相位;若检测器检测到有后续车辆到达,则每检测到一辆车,就从检测到车辆的时刻起,相位绿灯延长一个预置的“单位绿灯延长时间”,绿灯可一直延长到一个预置的“最大绿灯时间”,当相位绿灯时间延长到最大值时,则强制切换相位。
感应信号控制的三个基本参数分别为:最小绿灯时间、单位绿灯延长时间、最大绿灯时间。而检测器的埋设位置、相位相序的选择也对感应控制的控制效果有重要的影响。
2 感应控制主要参数的配时计算方法
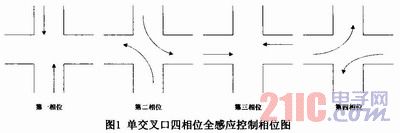
本文主要研究单个交叉口的四相位全感应控制方法。为了达到较好的控制效果,就必须对感应控制的主要参数进行合理的配时,如图1所示,图中箭头表示该相位允许通过的车流方向,规定所有右转车辆可自由通行。考虑到车流的动态变化,设计出一种动态相序的控制算法,并对初始绿灯时间、绿灯延长时间、最小和最大绿灯时间给出了计算方法。
2.1 初始绿灯时间G0
经典的感应控制通常采用固定初始绿灯时间,本文为了提高交叉口的通行能力,采用初始绿灯时间可变的方法,即在第i相位获得通行权的时刻,检测检测器与停车线之间的车辆排队长度Qi,初始绿灯时间是使Qi辆车全部驶离停车线所需要的时间,有:
![]()
其中,Qi为i相位获得通行权的时刻关键进口道上检测器与停车线之间的排队车辆数,单位为辆;Si为i相位关键进口道上的饱和流量,其单位为辆/小时;
2.2 单位绿灯延长时间
各相位的单位绿灯延长时间要保证车辆按进口道的行驶速度行驶时,能够行驶完检测器到停车线之间的距离,保证车辆在该延时内能够顺利通过停车线,即满足:
![]()
其中,Di为i相位关键进口道上检测器与停车线之间的距离,m;Vi为i相位关键进口道上车流的平均行驶速度,m/s;
2.3 最小绿灯时间
最小绿灯时间是信号相位获得通行权时所必须保证的绿灯时间,等于初始绿灯时间与单位绿灯延时之和,最小绿灯时间有:
![]()
其中:Gi0为i相位的初始绿灯时间,s;△i为湘位的单位绿灯间隔时间,s。
2.4 最大绿灯时间Gmax
最大绿灯时间,即为了保持最佳绿信比分配而确定的相位绿灯时间。它是相位绿灯时间的延长极限。当到达最大绿灯时间时,强制绿灯结束并改变相位,最大绿灯时间一般定为30-60s,可根据经验来设定。
3 检测器的布局
本文采用在所有进口道都埋设一对检测器的方法,以检测各车道的车辆到达情况和排队长度,如图2所示,其中一组检测器设置在刚刚越过停车线的位置,另一组检测器设置在停车线下游离停车线距离为Di的位置,Di的设置位置要保证在最小流量时车辆的排队长度不越过检测器,并且要保证检测器与停车线之间的最大排队车辆数能够在初始绿灯时间内疏散完毕,于是检测器与停车线之间的距离Di应满足:
![]()
其中:hi为i相位排队车辆平均车头间距,m;Qi为i相位关键进口道上检测器与停车线之间的最大排队车辆数,辆。

4 变相序的多相位感应控制算法
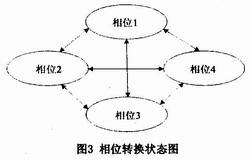
为了有效减小车辆平均延误,本文针对前文所述的单交叉口四相位全感应控制提出可变相序的感应控制算法,根据各相位的排队长度和平均等待时间确定一个优先值Wi,Wi=QiTi;其中,Qi为第i相位等待车辆的排队长度,T为第i相位的等待时间;显然,优先值越大的相位优先通行,通过判断优先值的方法灵活动态地变换相位,该配时方案的相序不固定,相位转换的状态图如图3所示,根据交通需求实时变换相位。
具体算法如下:
Step 1初始化,给每一相位任意车辆排队长度,把通行权交给排队长度最长的相位;
Step 2给获得通行权的相位一个初始绿灯时间;
Step 3给本相位一个单位绿灯延长时间。
Step 4检测本相位是否有车到达,无车,到Step5,有车,判断本相位绿灯时间是否到达最大绿灯时间,是,到Step5,否,到Step3。
Step 5计算各红灯相位的优先值,把通行权交给优先值最高的那个相位,到Step2;
5 仿真结果分析
为了验证本文所提出的算法的有效性,本文通过仿真平台上对经典感应控制算法和本文提出的动态相序的感应控制算法进行了比较实验,仿真软件采用微观交通仿真软件-USTCMTS1.0系统,因为感应控制只适用于饱和度不高的交通流条件,故取饱和度低于0.6的情况进行实验,仿真所选取的交叉路口的宽度为:东西方向和南北方向的道路宽度均为10.5m,仿真运行6000s,以车辆的平均延误作为标准,得到两种算法的平均延误,图4是根据仿真结果使用MATLAB所绘制的图形。

由仿真结果我们可以看出,本文所提出的动态相序的感应控制的平均延误要明显低于经典感应控制的平均延误。
6 结论
本文以单交叉口的感应控制为研究背景,针对经典感应控制算法相序固定、配时参数固定的缺点,提出一种变相序的、动态初始绿灯时间的多相位感应控制算法,仿真结果表明,改进后的感应控制算法较经典的感应控制算法有效地降低了车辆的平均延误,能够适应动态的交通流状况。
上一篇:基于RFID的智能自动化生产线过程管理
下一篇:基于LABVIEW的多路高速数据采集系统的设计
推荐阅读最新更新时间:2024-03-30 21:33

 张燕宾电工实践
张燕宾电工实践 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号