概述
对一个燃气站来说,连续的液位、压力和温度等监控点的监测十分重要。操作员需保证从中央控制室综合监测系统的运行状态,保护整个系统处在较高的安全水平上。当相关参数偏离正常范围时,系统发送信号通知操作员采取纠正措施。本系统完成了现场数据的采集和处理,在中央控制室实现现场各监控点运行状态的实时监控,通过网络能对系统进行远程监控。联网实现分布在全国各地分散燃气站点的集中监控,可以在线实时准确的掌握各燃气站的运行现状(包括燃气流量、储罐液位等监控参数),完成紧急情况下的报警,实现对燃气站进行整体集中的管理,便于资源的优化配置,为全面实现企业信息化奠定基础。
系统的总体结构方案
依据业主(华桑燃气公司)委托,并根据仪表及工艺专业所提供的资料与要求制定了适用于华桑燃气站工程的自动化系统。系统的整体结构方案如图1所示,这种以标准的工业计算机软、硬件平台及网络所构成的集成系统取代传统的封闭式系统,使得系统具有适应性强、开放性好、易于扩展、经济、开发周期短等鲜明优点。系统可划分为现场控制层、监控层、远程监控与管理层图3个层次结构。

现场控制层可由现场控制器PLC控制,实现对现场的设备进行数据采集、报警、控制、联锁等功能。
监控层采用组态软件,若设备层采用的是仪表控制,则现场数据和状态的采集通过PCI板卡完成(如本系统的武清子站),采集到的数据送入组态软件的实时数据库,经过适当数据处理,完成合适的画面和组态设置。监控层对下连接控制层,对上连接管理层,实现对现场的实时监测与控制,在自动控制系统中完成上传下达、组态开发的作用。
在远程监控和管理层,利用数据采集系统得到的生产数据直接参与核算,消除了繁琐的人工计算过程和工作强度,提高了管理水平。通过班组核算制,把实际生产中的有关参数从数据库中提取出来,然后按企业确定的核算公式进行计算,从而得到班组一定时间内的经济效益及各岗位的费用支出,用户可以根据需要定时打印班组核算表,并利用数据库把相关参数保存起来,也可以通过WEB服务器上传,实现远程监控与管理功能。
系统的功能及实现
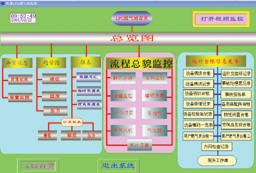
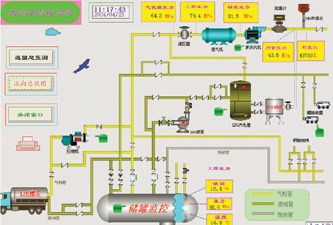
系统底层设备的控制、现场数据的采集和处理可由下位机完成,也可通过板卡完成数据的采集。系统具有流程及实时数据查看功能,每个子站均有各自的流程图,并在相应位置显示压力、温度、流量等参数。总部有各子站流程图及分布控制图,在相应位置显示各监控点参数,且还包括全站模拟量一览表。总览图和流程总貌如图2和3所示。
数据采集频率从毫秒级到任意可调,以满足不同通讯级别的要求。实现对每个参数的低低报警、低报警、高报警、高高报警的设置。以不同颜色形式,把当前报警、已确认报警和已恢复报警区分开来,每个报警量可以显示它的节点名、位号、描述、报警产生时间、报警消除时间、状态、当前值等信息。从上位机可以查看报警,并且可以对所有的报警进行打印。同时,从上位机可以查看事件记录,例如:某操作员于什么时间进行登录,什么时间退出登录等。并可以进行打印。
故障自动应变处理,将发生故障情况下,根据实际运行情况与系统安全运行条件要求的逻辑功能进行自动判断及处理,并通过远程控制单元对每个点的监控及时在主机上反映出故障原因并显示自动处理后系统运行状态。
趋势显示是带有时间标志的一个数据图表,显示为时间函数的趋势曲线。一个趋势显示能够显示数条不同颜色的趋势曲线。历史(归档或存储)数据趋势显示亦能提供。MMI能提供历史趋势和实时趋势的显示、打印功能。历史趋势和实时趋势画面中显示的检测变量,可由操作员根据需要进行选择。趋势图可采用带有时间坐标的线状图显示历史趋势和实时趋势,时间坐标和输入范围是可调的,至多有8个参数的趋势可显示在同一画面上,数据的采集频率也是可调的,还可设置单独的实时趋势画面,显示当前时刻30分钟内的实时数据。历史趋势可保存至少半年的数据。
可以查看压力、温度、流量等参数的实时和历史趋势图。一幅趋势图中最多有8个参数的趋势曲线,以不同的颜色来区分。
在上位机可以查看实时报表,实时报表中包含全线所有参数的当前值。可以随时打印实时报表,也可以定时打印。对于生产日报表,显示了每个参数全天24小时整点的值,可以进行定时打印。同时可以公布物资设备台帐、出勤记录等方面的报表。
实时数据库用于储存最新采集的来自现场控制站,以及通过通讯控制网络采集的其他系统的各种过程变量,这些数据可用于显示动态连接或实时报表。
通过PID运算,实现对各调节阀的控制。可以人为设定调压值,使之对管线进行自动调压。
通过TCP/IP方式实现现场各监控点数据及画面的远程监视。网络通信方式有多种,包括:TCP/IP网络通信、MODEM拨号通信和串口(RS232/422/485)通信等。
TCP/IP网络协议提供了在不同硬件体系结构和操作系统的计算机组成的网络上进行通信的能力。一台PC机通过TCP/IP网络可以和多个远程计算机进行通信。在一个支持TCP/IP协议的网络中(不论是局域网或是广域网,Intranet还是Internet),各网络结点之间可以进行数据通信,工作模式为“客户/服务器”。提供的网络服务程序NetClient和NetServer,分别运行于客户端和服务器端,实现网络通信功能。网络中的每台 PC机安装了组态软件和MODEM,其中的TelClient和TelServer,分别完成客户端和服务器端的MODEM通信功能。Web功能可使网络中作为客户的PC机直接通过浏览器直接浏览工程画面。
各燃气站采集系统可由ANCO系列双机热备PLC或通过PCItitle="数据" style="text-decoration:underline;color:blue">数据采集卡完成,中心监控系统由组态软件ForceControl完成。PLC控制系统采用ANCO GROUP的产品。它采用国际通用积木式结构组成,易安装、易使用,系统可靠性、兼容性、扩充性强,具有热插拔功能,远传通讯功能强大、组网灵活、独立完成测控任务,可以严格保证本站设施的安全运行、正常生产。应用的ANCO PLC 的OPEN_PLC是32位 CPU,I/O点数从100点到8000点,采用国际标准IEC61131-3编程软件,有4M编程空间;远程模块最大可连接32个站点,距离 1200m;支持RS485和RS232以太网端口。
中心控制系统的组态软件是数据采集与过程控制的专用软件,它处在自动控制系统监控层一级的软件平台和开发环境,组态方式灵活多样,可以提供友好的用户开发界面和简捷的使用方法,利用其预设置的各种软件模块能较方便的实现和完成监控层的各项功能,并能同时支持各种硬件厂家的计算机和I/O设备,与高可靠的工控计算机和网络系统结合,可向控制层和管理层提供软、硬件的全部接口,进行系统集成。
本系统采用的力控是运行在Windows98/NT/2000/XP操作系统上的一种组态软件。
控制原则
为保证系统平稳、安全、可靠、高效的运行,最大限度减少事故造成的损失, 控制原则如下设定:
■ 分布式控制原则:监控系统采用分布式的控制原则,一般的过程控制和设备保护功能由各现场站点内的底层控制设备自动执行,同时将执行结果上传到中控室。中控室作为运行监控的决策机构,可以只是监视,不直接介入各现场站控系统内的控制,负责各站点之间的协调控制,也可以直接介入站控系统进行控制操作处理。
■ 独立性原则:现场各控制系统之间在设计上应保持相对独立,不能因其中一个出现故障而影响其他控制系统的运行。
■ 容错性原则:SCADA系统的软硬件各个部分或全部的故障不能影响各现场站点的控制和运行。系统对各种控制操作应有基本的诊断和防错功能,以阻止错误操作、误操作或结果相互冲突的操作。为防止不同操作员对统一监控点下达不同的控制指令,造成系统异常动作,应有控制优先权处理程序来处理此类指令。
■ 安全管理原则:系统应有严格的安全和权限级别限制,不得随意越权操作。
■ 自动处理原则:一般在门站或调压站等站内的事故和故障,在没有及时得到中控室的响应时,应有现场站点的控制设备自动作应急处理操作,同时向控制中心报警和报告处理结果。故障或事故范围较大,超出现场站的控制范围时,由中控室协调处理,并做出相应的控制操作。
结论
本系统保护了整个燃气站处在较高的运行安全水平上,实现在中控室或在其他任何联网的计算机上实时的综合监控系统的运行状态,可以在线实时准确的掌握各燃气站的运行现状(包括燃气流量、储罐液位等监控参数),完成紧急情况下的报警,实现对燃气站进行整体集中的管理,同时网络技术和信息管理技术的应用提高了生产过程的生产效率和管理水平,实现优化物料平衡,减少库存和中间储存,也实现了企业实时、准确、全面系统化的信息系统,为高层领导决策提供支持,提高了企业的综合自动化水平。
上一篇:基于嵌入式系统的专用运动控制器硬件平台设计
下一篇:组合式空气消声过滤器在活塞压缩机上的应用
推荐阅读最新更新时间:2024-03-30 21:33

 核电厂仪表与控制 (刘国发, 郭文琪)
核电厂仪表与控制 (刘国发, 郭文琪) 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
- 研华全新模块化电脑SOM-6833助力5G路测设备升级
- 企业文化分享 如何培养稀缺的硅IP专业人员?SmartDV开启的个人成长与团队协作之旅
- 新帅上任:杜德森博士(Dr. Torsten Derr)将于2025年1月1日出任肖特集团首席执行官
- 英飞凌推出简化电机控制开发的ModusToolbox™电机套件
- 意法半导体IO-Link执行器电路板为工业监控和设备厂商带来一站式参考设计
- SABIC进一步深化与博鳌亚洲论坛的战略合作伙伴关系
- 使用 3.3V CAN 收发器在工业系统中实现可靠的数据传输
- 尼得科精密检测科技将亮相SEMICON Japan 2024
- 浩亭和美德电子(TTI)宣布战略合作伙伴关系现已扩展至亚洲










 京公网安备 11010802033920号
京公网安备 11010802033920号