1 引言
一般来说,大多数物理过程都具有复杂、高度非线性、易受外界干扰影响,且存在很大的不可知性等特点。利用传统的控制器来处理该类系统是非常困难的。然而,随着控制理论的不断发展,智能控制即使在不知道系统的数学模型的情况下也能获得比传统控制方法更好的控制效果[1]。跷跷板系统是一个比倒立摆系统更为复杂,更接近于实际应用的典型控制系统。它具有严重的非线性、强耦合、对干扰敏感、模型过于复杂等特点[2-5]。跷跷板系统是由一部小车、一个直流伺服电动机、两个分别用于测量角度和位置的电位计以及跷跷板三角体组成。而让跷跷板平衡的机制就是利用跷跷板系统中小车的移动来完成平衡的目的[6]。
由于跷跷板系统具有高度的非线性和强耦合性等特点以及变结构控制的抖振问题,本文将模糊滑模控制算法引入系统控制中以柔化控制量。使用模糊控制策略不仅可以使控制系统滑动模态的品质得到保证和改善,同时消除了滑模控制中的抖振现象。
2 跷跷板系统的数学模型
跷跷板系统示意图如图(1)所示。

图(1)跷跷板系统示意图
图中各参数定义如下:
![]() 杠杆的倾斜角度;X : 小车的位置;d1 : 杠杆相对支点高度0.125 m;d2 : 杠杆中心点相对支点高度0.058 m;Iw : 转动惯量0.395kg.m2;mb : 小车的质量0.57㎏;mw : 杠杆的质量3.6㎏; : 重力加速度9.81N/㎏。
杠杆的倾斜角度;X : 小车的位置;d1 : 杠杆相对支点高度0.125 m;d2 : 杠杆中心点相对支点高度0.058 m;Iw : 转动惯量0.395kg.m2;mb : 小车的质量0.57㎏;mw : 杠杆的质量3.6㎏; : 重力加速度9.81N/㎏。
定义拉格朗日算子
L=T-U (1)
其中T 为系统的动能,U 为系统的势能。取状态变量为![]() ,为构造拉格朗日方程,分别求出
,为构造拉格朗日方程,分别求出

将(4)式代入(2)式和(3)式,即可得到(5)和(6)式

通过(5)和(6)式可分别求得![]() 和
和![]() 的表达式
的表达式

方程组(7)即为系统的非线性状态方程表达式。
3 模糊滑模控制器的设计
滑模变结构控制具有响应速度快、鲁棒性强等优点,被广泛应用与非线性系统控制当中,但是滑模控制容易引起系统的抖振现象,导致系统的最终不稳定。模糊滑模控制是在不确定环境下,对于复杂对象进行有效控制的一种智能控制方法。它不依赖系统的模型,而且对干扰具有完全的鲁棒性,同时保持了模糊控制和滑模控制的优点。模糊滑模控制的基本设计方法是在滑模控制系统的趋近阶段通过模糊逻辑调节控制作用来补偿未建模动力学的影响,其目的是提高控制系统的品质、减少到达滑动面时间、降低抖振。文中利用模糊控制规则调整控制输入量 的大小,保证滑模控制到达条件得到满足。模糊滑模控制原理如图1所示。

图1 模糊滑模控制原理图
由图可知,模糊滑模控制系统由三部分组成,即切换函数、模糊控制器、和被控对象。滑模函数的输入为系统状态变量,切换函数设计为s=C·X
(1)
模糊控制器的输入为切换函数 及其变化率![]() ,这样可有效的减少模糊规则的数量,很好的解决高阶系统多输入中存在的规则爆炸问题。控制的变化量 作为滑模控制器的输出,可使模糊滑模控制成为无模型控制,依赖于被控对象的程度较小[7]。
,这样可有效的减少模糊规则的数量,很好的解决高阶系统多输入中存在的规则爆炸问题。控制的变化量 作为滑模控制器的输出,可使模糊滑模控制成为无模型控制,依赖于被控对象的程度较小[7]。
根据模糊控制原理,定义模糊集 ,

其中PB,PM,PS,ZO,NS,NM,NB分别表示为正大,正中,正小,零,负小,负中,负大。在满足不等式的条件下设计 ,所获得的控制表如表1所示。使用的模糊规则是![]()
表1 模糊控制规则表

表中所有的控制规则是根据满足 ![]() 这个达到滑模的充要条件所设计的[8],所以设计的模糊滑模控制系统是稳定的。
这个达到滑模的充要条件所设计的[8],所以设计的模糊滑模控制系统是稳定的。
4 仿真研究
定义S ,![]() , 其论域分别为
, 其论域分别为![]()
,![]() ,
,![]() ,模糊化变量均选择正态分布隶属函数。
,模糊化变量均选择正态分布隶属函数。
(1)式中取![]() 。仿真结果如图2~5所示。
。仿真结果如图2~5所示。

图2 小车位置随时间变化曲线

图3 杠杆角度随时间变化曲线

图4 切换函数对时间变化曲线 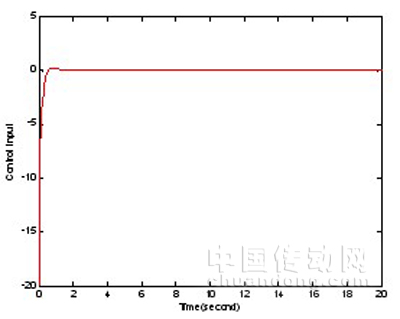
图5 控制律随时间变化曲线
由以上仿真结果可以看出,利用本文方案设计的控制器大大加快了系统的响应速度,且能有效地减小系统的最大偏差,系统的抖振现象也基本可以消除。
5结论
本文介绍了跷跷板系统的工作原理,建立了跷跷板系统的数学模型。针对常规滑模控制中存在的抖振现象,将模糊滑模控制方法引入跷跷板控制系统中,通过仿真可以看出,将模糊滑模控制应用于具有强耦合、非线性特性的跷跷板系统是切实可行的,而且使用滑模模糊控制算法设计出来的控制器具有很强的鲁棒性。
参考文献
[1] 蔡自兴.智能控制基础与应用[M].北京:国防工业出版社,1998.
[2] Chia-Ju Wu.Quasi Time-Optimal PID Control of Multivariable Systems:A Seesaw Example[J] Journal of the Chinese Institute of Engineers,Vol.22, No.5,pp.617-625(1999)
[3] Lon-Chen Hung, Hung-Yuan Chung .Decoupled Control Using Neural Network-based Sliding-mode Controller for Nonlinear Systems[J] .Expert Systems with Applications 32 (2007) 1168–1182
[4] Jeng-HannLI, Tzuu-Hseng S. Li* and Ting-Han Ou.Design and Implementation of Fuzzy Sliding-Mode Controller for a Wedge Balancing System[J]. Journal of Intelligent and Robotic Systems 37: 285–306, 2003.
[5] Chun-Hsien Tsai, Hung-Yuan Chung. Neuro-Sliding Mode Control With Its Applications to Seesaw Systems. IEEE Transactions on Nural Networks, vol 5, No. 1, Jaunary 2004
[6] Wincon User Guide[M].522-530.2003
[7] 刘金琨. 滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005:100-120.
[8] 刘金琨.滑模变结构控制MATLAB仿真[M].北京,清华大学出版社,2005.
上一篇:无刷直流电机驱动控制器的S0PC技术研究
下一篇:自动窗帘控制系统设计
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 LM208AN
LM208AN










 京公网安备 11010802033920号
京公网安备 11010802033920号