1 三相双开关PFC电路CCM下的工作原理
1.1 主电路结构
电路将三相交流电的中性线与2个串联开关管S1,S2的中点以及2个串联电容C1,C2的中点相连接,构成三电平(正、负电压和零电压)结构,2个串联电容分别并联平衡电阻R1,R2,使上、下半桥作用于电容C1,C2的输出电压相等。电路结构如图1所示。

由于中性线的存在,上下半桥相互独立,形成部分解耦的基础,并且开关器件承受的电压只有输出电压的1/2,降低了对开关管的选型要求。在此基础上提出一些新的双开关拓扑结构,但结构复杂,难以控制。
1.2 过程分析
由上述分析,上、下半桥可作为独立结构分析。以上半桥为例,等效电路图如图2所示。

由三相电压的对称特性,每2π/3的区间里,只有一相正相电压最大,如果能使每相的瞬时电流在2π/3的区间里跟踪其最大相电压,即可实现最大程度的电流校正。根据这样的思路,现分析[π/6~5π/6]中a相电流的变化,因为这段区间Ua最大,可分3个阶段分析。

第1阶段[π/6~π/3],Ua>Uc>O,在t0时刻开通S1,a相和c相电感同时充电,导通时间ton,这段时间的等效电路如图3所示。由于开关器件载波频率远大于工频,因此对于S1开关周期电路分析可将三相电源等效为对应的直流电压源。基于此假设可知,载波频率越高,电流波形越接近推理结果。此时的a相电流参见式(1):
式中:ILc(t0)为c相电流初值。
在t1时刻关断S1,电压源和储能电感共同向负载提供能量,电感电流下降,由于Uc较小,iLc的下降率更大。该段时间的等效电路如图4所示。此时a相的电感电流参见式(3):
式中:ILa(t1)为a相电流初值,U01为上半桥输出电压。
同理,c相电流参见式(4):

式中:ILc(t1)为c相电流初值。

由以上公式推理可得iLa和iLb的波形如图5所示。由于电流的连续模式,a相电感放电阶段不会回零,且变化斜率由相电压幅值决定,如式(1)、式(3)所示。由于单相电路等效为Boost电路,当电路运行在CCM模式,占空比计算如式(5)所示:
![]()
式中:Uo1是上半桥的输出电压。
第2阶段[π/3~2π/3],正相电流只有a相,所以开关的通断只会引起iLa的变化。
第3阶段[2π/3~5π/6],a相和b相电压为正,开关的通断会引起iLa,iLb的变化。电路分析过程均和第一阶段类似。通过上面的分析可知。在[π/6~5π/6]控制a相的电流跟随其最大相电压,既可以使a相的电流得到最大的补偿,又可以使相邻相的电流得到一定补偿。这种控制方法简单,可行性高,但由于电路处于部分解耦状态,在第l(或3)阶段无法对c(或b)相进行独立控制,补偿效果并不理想,如何优化控制以减小c(或b)电流谐波仍有待解决。
2 CCM模式下的控制和仿真
2.1 控制分析
按电感电流是否连续,APFC电路的工作模式可以分为连续导电模式(CCM)、断续导电模式(DCM)和介于两者之间的临界断续导电模式(DCM boundary)。该电路可以工作在DCM和CCM模式下。工作在DCM模式下,THD仍然较大。本文使用平均电流控制技术,由于平均电流控制电路具有体积小,重量轻,系统噪声小,稳定性高等优点,因而得到了广泛的应用。总控制框图如图6所示。

结合第1节的分析,它的基本控制原理是:采用双闭环控制策略,即电压外环和电流内环相结合。电压外环的任务是采样输出电压和给定比较,差值经过PI调节和三相交流电压的最大(最小)值相乘作为相位给定,再取样实际输入的三相电流的最大(最小)值,两者的差值和三角载波比较产生驱动信号,驱动MOS管。上、下桥臂的MOS管完全独立,互不影响。这样控制的好处是:在最大程度上(2π/3的区间里)对每相进行最优控制,控制算法简单,采用数字化的控制方法,成本低。性价比高。实际的校正过程是(以正半桥为例):当输出大于400 V,误差为正,经过PI调节,误差被正向放大,经乘法器得到与输入电压同相位的单位正弦电流也相应增大,与实际电流的差值增加,使PWM的占空比增大,输出电压减小。
2.2 仿真分析
本文的仿真是基于Matlab/Simulink平台,应用其中SimPowerSystems模块中的元件搭建而成。应用Matlab/Simulink不需要再建立各种模块的模型,可以快速验证系统的可行性和控制算法的有效性。电路的仿真参数为:输入电压:三相交流380 V;输出电压:800 V;开关频率为:10 kHz;Boost电感值:300μH;输出滤波电容:470μF;平衡电阻:100 kΩ;负载电阻:100 Ω;输出功率:6.4 kW。上桥臂的控制模块的仿真电路需要注意:采样三相电压的瞬时值作为给定一般在整流后,但由于电感、电容的存在,使整流后的波形并不是标准的馒头波,所以采整流前端的三相电压作为给定;三角载波模块取自plecs工具箱,设置较为容易,载波频率为10 kHz;使用加减模块和滞环模块组合,通过设置环宽为0,可以实现电压(电流)比较器的功能;下桥臂的电压给定取自负半桥最小电压的绝对值(不是最大电压)。在此基础上,仿真得到的波形如图7所示。观察a相和c相电流波形可知,电路工作在CCM模式下,在[π/6~5π/6],a相电流得到了最大补偿;而在[O~π/6],a相的电流补偿效果是比较差的,因为此时的控制量是c相电流,c相电流得到最大补偿;同理在[5π/6~π],b相电流得到最大补偿,就是说补偿了c相电流,却破坏了a相的电流波形。其中a相电流THD=13.76 %,其中3次和5次谐波的幅值较大,可以考虑用谐波注入法来消除3次与5次谐波。半桥电压的平均值为400.2 V,负载电压平均值为800 V,从仿真结果看,控制的基本思路是正确的。

3 实验分析
该实验的控制芯片使用DSP2407,其内部的事件管理器EV和A/D模块,资源丰富。驱动芯片使用M57962L,它集成过流保护电路和过流保护输出端子。本文实验的硬件控制框图如图8所示。
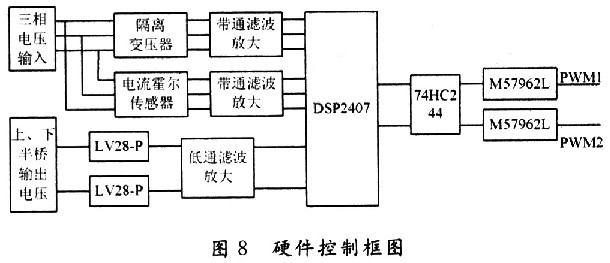
实现CCM控制的算法都是在DSP中完成的,外部硬件只需检测控制所需的8个信号,可见采用DSP所需的硬件电路较少,这使得控制系统的修改和维护变得相当容易和方便。实际波形和仿真结论基本吻合,如图9、图10所示。图中,在[0~π/6],a相电流的补偿效果最好;在[π/6~5π/6]和[5π/6~π],电流比较平,补偿的效果比较差,这是由部分解耦的特点决定的。

4 结语
本文提出了三相双开关PFC电路在CCM模式下的控制策略,分析了电路的工作原理,给出了该电路在开关周期内的波形和工作方程表达式,并且通过仿真和试验结果验证了电路分析的正确性。该电路结构简单,控制容易,成本低并且输入电流谐波低、功率因数高,适用于中、大功率应用场合。
上一篇:基于茶园旱情监测系统的WSN网关设计
下一篇:基于DSP的双足机器人运动控制系统设计
- 热门资源推荐
- 热门放大器推荐
 模拟集成电路设计与仿真
模拟集成电路设计与仿真 JM38510/12206BGA
JM38510/12206BGA










 京公网安备 11010802033920号
京公网安备 11010802033920号