摘要:该自主车辆地面自动辨识技术是以Leobot—Edu自主车辆作为试验载体,并应用DH—HV2003UC—T视觉传感器对常见的5种行车路面(石子路面、水泥路面、土壤路面、草地路面、砖地路面)进行图像信息的采集,应用Matlab图像处理模块对其依次进行压缩嫡码、复原重建、平滑、锐化、增强、特征提取等相关处理后,再应用Matlab BP神经网络模块进行模式识别。通过对模式识别结果分析可知,网络训练目标的函数误差为20%,该系统路面识别率达到预定要求,可以在智能车辆或移动机器人等相关领域普及使用。
关键词:自主车辆;视觉传感器;图像处理;模式识别
0 引言
20世纪80年代,具有广阔应用前景的自主车辆受到中西方各国的普遍关注。自主车辆接收的大部分信息来自机器视觉。CCD将行车路面转换为光电图像信息,并通过计算机进行相关处理,快速在复杂环境中提取有用信息并产生合理的行为规划。为了满足自主车辆地面自动辩识技术对识别率的预定要求,本文分别对地面图像信息采集模块、机器视觉图像处理模块、神经网络模式识别模块进行了设计与研究。
1 地面图像信患采集模块
该设计将上海中为智能机器人有限公司出品的教育型机器人Leobot—Edu作为试验载体,将大恒DH—HV2003UC—T视觉传感器安装在车体之上,并对常见的五种行车路面(石子路面、水泥路面、土壤路面、草地路面、砖地路面)进行地面图像信息的采集。为了提高模式识别结果的准确性,该设计中对每一路面都进行了6次采集作业,并搜集到6组地面图像信息,将其中质量最好的一组地面图像信息作为训练样本,将剩余的5组地面图像信息作为测试样本。本文以训练样本中石子路面为例,进行分析说明,其路面原图如图1所示。
关键词:自主车辆;视觉传感器;图像处理;模式识别
0 引言
20世纪80年代,具有广阔应用前景的自主车辆受到中西方各国的普遍关注。自主车辆接收的大部分信息来自机器视觉。CCD将行车路面转换为光电图像信息,并通过计算机进行相关处理,快速在复杂环境中提取有用信息并产生合理的行为规划。为了满足自主车辆地面自动辩识技术对识别率的预定要求,本文分别对地面图像信息采集模块、机器视觉图像处理模块、神经网络模式识别模块进行了设计与研究。
1 地面图像信患采集模块
该设计将上海中为智能机器人有限公司出品的教育型机器人Leobot—Edu作为试验载体,将大恒DH—HV2003UC—T视觉传感器安装在车体之上,并对常见的五种行车路面(石子路面、水泥路面、土壤路面、草地路面、砖地路面)进行地面图像信息的采集。为了提高模式识别结果的准确性,该设计中对每一路面都进行了6次采集作业,并搜集到6组地面图像信息,将其中质量最好的一组地面图像信息作为训练样本,将剩余的5组地面图像信息作为测试样本。本文以训练样本中石子路面为例,进行分析说明,其路面原图如图1所示。

2 机器视觉图像处理模块
2.1 图像压缩编码
应用线性预编码方法对图像压缩进行编码。图像压缩的基本方法有无损压缩和有损压缩两类。预测编码方式是应用较广泛的有损压缩编码技术。DPCM系统的核心是预测器设计,预测器与压缩率有密切联系,最简单的预测器是线性预测器,即:
式中:ai为预测系数;k为预测阶数。设计时通常按均方误差最小化准则对预测误差和量化误差进行理想的联合最佳化。均方误差定义为:
令对每个ai的偏导数为零,即可求出为最小值时的各预测系数ai。定义数据的自相关函数为:

只要已知xn的k+1个相关函数值R(0),R(1),R(2),…,R(k),即可解出k个预测系数使均方误差最小。
该设计训练样本中石子路面图像的压缩编码图如图2所示。

2.2 图像复原重建
图像复原重建有诸多方法,本文采用较为常用的维纳滤波复原法。寻找一个滤波器使得复原后的图像 与原始图像f(x,y)的方差最小,即:
与原始图像f(x,y)的方差最小,即:

式中:E{·}为数学期望算子。如果图像f(x,y)与噪声n(x,y)不相关,且h(x,y)有零均值,则由上述条件可以推导出维纳滤波器的传递函数为:

式中:H*(u,v)为退化系统传递函数;H(u,v)的复共轭;Pf(u,v)和Pn(u,v)分别为原始图像和噪声的功率谱。
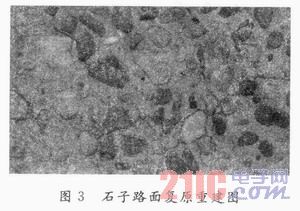
该设计训练样本中石子路面图像的复原重建图如图3所示。
图像平滑分为空间域处理和频率域处理两种。中值滤波法是非线性信号处理方法,它是用一个有奇数点的滑动窗口并将窗口中心点的值用窗口内各点的中值代替。设一维序列f1,f2,…,fn,取窗口长度为m,对此一维序列进行中值滤波,就是从输入序列中相继抽出m个数fi-v,…,fi-1,fi,fi+1,…,fi+v。其中,fi为窗口中心点值 ,再将这m个点值按其数值大小排序,取其序号为中心点的那个数作为滤波输出。用数学公式表示为:
,再将这m个点值按其数值大小排序,取其序号为中心点的那个数作为滤波输出。用数学公式表示为:

式中:A为窗口;{fij}为二维数据序列。
该设计训练样本中石子路面图像的平滑图如图4所示。


2.2 图像复原重建
图像复原重建有诸多方法,本文采用较为常用的维纳滤波复原法。寻找一个滤波器使得复原后的图像
式中:E{·}为数学期望算子。如果图像f(x,y)与噪声n(x,y)不相关,且h(x,y)有零均值,则由上述条件可以推导出维纳滤波器的传递函数为:

式中:H*(u,v)为退化系统传递函数;H(u,v)的复共轭;Pf(u,v)和Pn(u,v)分别为原始图像和噪声的功率谱。
该设计训练样本中石子路面图像的复原重建图如图3所示。

图像平滑分为空间域处理和频率域处理两种。中值滤波法是非线性信号处理方法,它是用一个有奇数点的滑动窗口并将窗口中心点的值用窗口内各点的中值代替。设一维序列f1,f2,…,fn,取窗口长度为m,对此一维序列进行中值滤波,就是从输入序列中相继抽出m个数fi-v,…,fi-1,fi,fi+1,…,fi+v。其中,fi为窗口中心点值

式中:A为窗口;{fij}为二维数据序列。
该设计训练样本中石子路面图像的平滑图如图4所示。

2.4 图像锐化
图像锐化可以在空间域中进行,常用的方法是微分法;亦可以在频率域中进行,常用的方法是高通滤波法。图像中的边缘或线条等细节部分与图像频谱中的高频成分相对应,因此采用高通滤波法让高频分量顺利通过,使低频分量受到抑制,就可增强高频的成分,使图像的边缘或线条变得清晰,实现图像的锐化。高通滤波可用空间域或频域法来实现。在空间域实现高通滤波通常是用离散卷积法,卷积的表达式是:

式中:g(m1,m2)是m×m方阵;f(n1,n2)是n×n方阵,冲击响应H是l×l方阵,归一化的冲击方阵可以避免处理后的图像出现亮度偏移,其中的H等效于用Laplacian算子增强图像。
该设计训练样本中石子路面图像的锐化图如图5所示。
2.5 图像增强
图像的直方图是图像的重要统计特征,是表示数字图像中每一灰度级与该灰度级出现的频数间的统计关系。用横坐标表示灰度级,纵坐标表示频数。按照直方图的定义可表示为:

式中:N为一幅图像的总像素数;nk是k级灰度的像素数;rk表示第k个灰度级;P(rk)表示该灰度级出现的相对频数。直方图修正通常有直方图均衡化和直方图规定化两大类。直方图均衡化是一种常用的灰度增强算法,是将原图像的直方图经过变换函数修整为均匀直方图,然后按均衡化后的直方图修整原图像。直方图的规定化是使增强后图像的灰度级分布是不均匀且具有规定形状的直方图,可以突出感兴趣的灰度范围。
该设计训练样本中石子路面图像的增强图如图6所示。
2.6 图像特征提取
图像特征是指图像的原始特性或属性。图像特征的提取有很多方法,其中比较典型的有:8连接边界特征、4连接边界特征、面积比特征、欧拉数特征、角点特征和矩特征。分别予以说明如下:
(1)边界特征。像素的4-邻域称像素的(i,j)的直接邻域,符号为d-近邻。像素的8-邻域是除去d-近邻的像素外剩下的对角线上的4个像素,称为(i,j)的非直接邻域,符号为i-近邻。
(2)面积比特征。为满足图像检索的要求把图像以图像质点为圆心,以距圆心最远的像素点为半径画圆,而后将圆的半径等距分成n份,画n个同心圆。设圆环内面积分别为s(1),s(2),…,s(n),如果图像面积用图像像素点表示,并将s(N)归一化,得到Ts(N)即:

式中:N为1,2,…,n;m00为总面积;s(N)为面积特征向量。
(3)欧拉数特征。在二值图像中1像素连接成分数C减去孔数H的值为图像的欧拉数。通常用E来表示图像的欧拉数,则:

(4)角点特征。角点检测方法有2种:提取图像边缘并以链码形式将其表示,而后找最大曲率的点作为角点;对图像灰度进行操作并计算图像灰度分布的曲率,找最大曲率的点作为角点。Harris算子定义为:

式中:k取0.04~0.06之间。当R(x,y)超过给定的阈值时则认为该点为图像的角点。
(5)矩特征:设二维连续函数f(x,y),(p,q)阶矩定义为:

式中:q=0,1,2,…。若矩是分段连续的且只在xy平面内具有非零值,则存在各阶矩。
该设计训练样本中石子路面图像的8连接边界特征图、4连接边界特征图、面积比特征、欧拉数特征、角点特征、矩特征如图7所示。

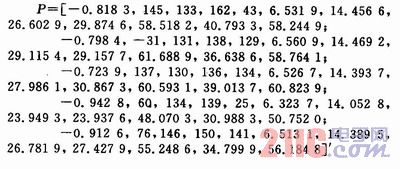
图7中,面积比特征为-0.431 0;欧拉数特征为119;角点特征为(1 075,1 024)135,(1 099,1 029)136,(956,1 031)139;矩特征为6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9。
同理,训练样本中5种路面的6个相关特征参数如下所示:
石子路面:-0.431 0,119,135,136,139,6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9;
水泥路面:-0.953 8,42,161,143,135,6.556 8,14.459 4,30.881 7,32.196 2,64.574 4,39.641 1,65.386 5;
土壤路面:-0.792 8,63,147,113,143,6.533 9,14.418 0,32.086 8,31.915 5,64.111 2,41.127 8,65.093 5;
草地路面:-0.822 4,138,60,106,75,6.510 7,14.377 1,26.706 9,29.822 3,59.502 0,38.214 6,58.168 3;
砖地路面:-0.375 7,-48,149,137,143,6.567 5,14.485 3,30.016 5,30.394 0,61.165 5,41.055 4,60.736 7。
3 神经网络模式识别模块
应用Matlab中BP神经网络模块进行分类与识别。人工神经网络简称为神经网络。人工神经元k表示为:

式中:xi为输入信号;wik为神经元k的突触权值;m为输入信号数目;uk为线性组合器的输出;bk为神经元单元的阈值;f(·)为激活函数;yk为输出信号。神经元的输入/输出状态表示为:

式中:τij为突触时延;Tj为j的阈值;wij为i到j的突触连接系数;f(·)为变换函数。
该设计在分析多种数据分类方法和理论之后,以石子路面、水泥路面、土壤路面、草地路面、砖地路面5种常见行车路面为研究对象,采集了6组路面图像特征信息作为备选库,其中以质量最优的一组路面图像特征信息作为训练样本,把其他5组路面图像特征信息作为测试样本进行BP神经网络的建立、训练、测试。
3.1 BP神经网络的建立
该设计在BP神经网络的建立过程中应用newff()函数对各个参数进行了相关设置。其训练样本、目标样本如下所示:
3.2 BP神经网络的训练
该设计在BP神经网络的训练过程中应用train()函数对各个参数进行了相关设置,其显示周期、学习速度、最大训练轮回数、目标函数误差如下所示:

3.3 BP神经网络的测试
该设计在BP神经网络的测试过程中应用sire()函数对各个参数进行了相关设置,其测试样本如下所示:
该设计中5种路面图像的BP神经网络模式识别训练目标函数误差为20%,实现了方便快捷的模式识别分类功能,结果如图8所示。
4 结语
文中研究的自主车辆地面自动辨识技术基于视觉传感器的地面图像信息自主识别技术,在诸多领域具有广泛的应用前景。通过对模式识别结果分析可知,训练目标函数误差为20%,该系统路面识别率达到预定要求,可以在智能车辆或移动机器人等相关领域普及使用。
图像锐化可以在空间域中进行,常用的方法是微分法;亦可以在频率域中进行,常用的方法是高通滤波法。图像中的边缘或线条等细节部分与图像频谱中的高频成分相对应,因此采用高通滤波法让高频分量顺利通过,使低频分量受到抑制,就可增强高频的成分,使图像的边缘或线条变得清晰,实现图像的锐化。高通滤波可用空间域或频域法来实现。在空间域实现高通滤波通常是用离散卷积法,卷积的表达式是:

式中:g(m1,m2)是m×m方阵;f(n1,n2)是n×n方阵,冲击响应H是l×l方阵,归一化的冲击方阵可以避免处理后的图像出现亮度偏移,其中的H等效于用Laplacian算子增强图像。
该设计训练样本中石子路面图像的锐化图如图5所示。
2.5 图像增强
图像的直方图是图像的重要统计特征,是表示数字图像中每一灰度级与该灰度级出现的频数间的统计关系。用横坐标表示灰度级,纵坐标表示频数。按照直方图的定义可表示为:
式中:N为一幅图像的总像素数;nk是k级灰度的像素数;rk表示第k个灰度级;P(rk)表示该灰度级出现的相对频数。直方图修正通常有直方图均衡化和直方图规定化两大类。直方图均衡化是一种常用的灰度增强算法,是将原图像的直方图经过变换函数修整为均匀直方图,然后按均衡化后的直方图修整原图像。直方图的规定化是使增强后图像的灰度级分布是不均匀且具有规定形状的直方图,可以突出感兴趣的灰度范围。
该设计训练样本中石子路面图像的增强图如图6所示。

2.6 图像特征提取
图像特征是指图像的原始特性或属性。图像特征的提取有很多方法,其中比较典型的有:8连接边界特征、4连接边界特征、面积比特征、欧拉数特征、角点特征和矩特征。分别予以说明如下:
(1)边界特征。像素的4-邻域称像素的(i,j)的直接邻域,符号为d-近邻。像素的8-邻域是除去d-近邻的像素外剩下的对角线上的4个像素,称为(i,j)的非直接邻域,符号为i-近邻。
(2)面积比特征。为满足图像检索的要求把图像以图像质点为圆心,以距圆心最远的像素点为半径画圆,而后将圆的半径等距分成n份,画n个同心圆。设圆环内面积分别为s(1),s(2),…,s(n),如果图像面积用图像像素点表示,并将s(N)归一化,得到Ts(N)即:
式中:N为1,2,…,n;m00为总面积;s(N)为面积特征向量。
(3)欧拉数特征。在二值图像中1像素连接成分数C减去孔数H的值为图像的欧拉数。通常用E来表示图像的欧拉数,则:
(4)角点特征。角点检测方法有2种:提取图像边缘并以链码形式将其表示,而后找最大曲率的点作为角点;对图像灰度进行操作并计算图像灰度分布的曲率,找最大曲率的点作为角点。Harris算子定义为:
式中:k取0.04~0.06之间。当R(x,y)超过给定的阈值时则认为该点为图像的角点。
(5)矩特征:设二维连续函数f(x,y),(p,q)阶矩定义为:

式中:q=0,1,2,…。若矩是分段连续的且只在xy平面内具有非零值,则存在各阶矩。
该设计训练样本中石子路面图像的8连接边界特征图、4连接边界特征图、面积比特征、欧拉数特征、角点特征、矩特征如图7所示。

图7中,面积比特征为-0.431 0;欧拉数特征为119;角点特征为(1 075,1 024)135,(1 099,1 029)136,(956,1 031)139;矩特征为6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9。
同理,训练样本中5种路面的6个相关特征参数如下所示:
石子路面:-0.431 0,119,135,136,139,6.555 4,14.418 7,27.517 5,26.824 8,54.171 2,34.098 3,55.239 9;
水泥路面:-0.953 8,42,161,143,135,6.556 8,14.459 4,30.881 7,32.196 2,64.574 4,39.641 1,65.386 5;
土壤路面:-0.792 8,63,147,113,143,6.533 9,14.418 0,32.086 8,31.915 5,64.111 2,41.127 8,65.093 5;
草地路面:-0.822 4,138,60,106,75,6.510 7,14.377 1,26.706 9,29.822 3,59.502 0,38.214 6,58.168 3;
砖地路面:-0.375 7,-48,149,137,143,6.567 5,14.485 3,30.016 5,30.394 0,61.165 5,41.055 4,60.736 7。
3 神经网络模式识别模块
应用Matlab中BP神经网络模块进行分类与识别。人工神经网络简称为神经网络。人工神经元k表示为:

式中:xi为输入信号;wik为神经元k的突触权值;m为输入信号数目;uk为线性组合器的输出;bk为神经元单元的阈值;f(·)为激活函数;yk为输出信号。神经元的输入/输出状态表示为:
式中:τij为突触时延;Tj为j的阈值;wij为i到j的突触连接系数;f(·)为变换函数。
该设计在分析多种数据分类方法和理论之后,以石子路面、水泥路面、土壤路面、草地路面、砖地路面5种常见行车路面为研究对象,采集了6组路面图像特征信息作为备选库,其中以质量最优的一组路面图像特征信息作为训练样本,把其他5组路面图像特征信息作为测试样本进行BP神经网络的建立、训练、测试。
3.1 BP神经网络的建立
该设计在BP神经网络的建立过程中应用newff()函数对各个参数进行了相关设置。其训练样本、目标样本如下所示:

3.2 BP神经网络的训练
该设计在BP神经网络的训练过程中应用train()函数对各个参数进行了相关设置,其显示周期、学习速度、最大训练轮回数、目标函数误差如下所示:

3.3 BP神经网络的测试
该设计在BP神经网络的测试过程中应用sire()函数对各个参数进行了相关设置,其测试样本如下所示:

该设计中5种路面图像的BP神经网络模式识别训练目标函数误差为20%,实现了方便快捷的模式识别分类功能,结果如图8所示。

4 结语
文中研究的自主车辆地面自动辨识技术基于视觉传感器的地面图像信息自主识别技术,在诸多领域具有广泛的应用前景。通过对模式识别结果分析可知,训练目标函数误差为20%,该系统路面识别率达到预定要求,可以在智能车辆或移动机器人等相关领域普及使用。
 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南 TC52N3728ECTRT
TC52N3728ECTRT
小广播
热门活动
换一批
更多

最新工业控制文章
更多精选电路图






更多热门文章
更多每日新闻
- 大联大品佳集团推出以复旦微和ams OSRAM产品为主的汽车氛围灯方案
- 为啥车载操作系统(Vehicle OS)越来越重要了呢?
- 车载传感器 — 一文详解激光雷达
- 汽车(超声波、毫米波、激光)雷达之间的简单区别
- 汽车电路相关知识大全
- Bourns 推出两款厚膜电阻系列,具备高功率耗散能力, 采用紧凑型 TO-220 和 DPAK 封装设计
- SABIC进一步深化与博鳌亚洲论坛的战略合作伙伴关系
- 使用 3.3V CAN 收发器在工业系统中实现可靠的数据传输
- 凌华智能推出AmITX Mini-ITX 主板,助力边缘人工智能和物联网创新
- 英飞凌携手马瑞利采用AURIX™ TC4x MCU系列推动区域控制单元创新
更多往期活动
11月21日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号