步进电机是一种完全数字化的电动执行机构,从原理上说,其角位移与驱动脉冲的个数成正比,在正常情况下,步进电机具有使用简单、运动精确、连续运行无累积误差等特点,因而被广泛应用于各种位置控制系统中。当前由于仪器内部的机械系统日益复杂,其运动往往是多自由度的,因而通常需要利用多个步进电机的运动合成来实现系统的各种动作。例如,对图1所示的半自动生化分析仪的取样针移位系统,该系统的动作执行就是由两部分组成的:一是固定基座上的步进电机控制取样横臂进行垂直方向上的升降运动;二是滑块上的步进电机控制取样横臂进行水平方向上的旋转运动。这两个运动的合成实现了取样横臂的位置变换。

传统的步进电机多轴控制器是以微控制器(MCU)/微处理器(MPU)/专用集成电路(ASIC)/数字信号处理器(DSP)为核心,再辅以其他外围分立器件构成的。这种结构的步进电机多轴控制器的优点在于其硬件结构清晰,易于复制再现,对于类似的应用只需要修改其应用软件即可。然而对于多数实际应用来说,单纯依靠软件的修改通常不足以使其达到其他应用场合所需的要求,并且当系统升级时,通常需要对整个电路重新进行设计,这样既延长了升级的周期,又增加了升级成本。因而在实际应用中受到了一定的限制。由于可编程逻辑器件(PLD)技术的飞速发展,使得单一FPGA/CPLD芯片内部可以集成多个分立元件的功能,因此在对传统控制器的改进中,通常使用一个FPGA/CPLD芯片将传统控制器中的数字电路部分集成到一起,从而形成具有处理器一FPCA/CPLD-模拟电路结构形式的控制器。这类控制器比起传统控制器而言,其硬件结构的可扩展性得到了很大的提高。这是因为FPGA/CPLD芯片具有在不改变其引脚定义的情况下可对其内部逻辑关系进行重构的特性,因而对于不同的应用,可以通过改变FPGA/CPLD芯片的内部结构来满足某些特殊的应用需求,从而在一定程度上使得系统的开发升级更为简便,而且成本也更为低廉。因此,这种改进型的多步进电机控制器的应用范围也得到了很大的扩展。但是,这种结构的控制器也存在着这样的问题:在FPGA外部仍然存在一个处理器。这样不仅增加了控制器的尺寸,而且在升级处理器时,硬件电路需要重新设计,使升级成本仍然相对较高。
近年来,由于IP资源复用理念得到了普遍的认同并成为主要设计方式,MCU、DSP、MPU等嵌入式处理器IP成为了FPGA应用的核心。随着处理器内核以IP的形式嵌入到FPGA中,未来的电路板上可能只有两部分电路:模拟部分(包括电源)以及FPGA芯片和一些大容量存储器。这一切都表明可编程片上系统(SOPC)正在成为FPGA最重要的发展方向。与传统多轴控制器相比。这种基于SOPC的步进电机多轴控制器具有体积小、集成度高、硬件结构稳定、易于开发升级且成本低廉等特点,尤其适用于仪器仪表内部控制系统的设计。本文所论述的步进电机多轴控制器就是基于SOPC方式的步进电机多轴控制器。
1 基于SOPC的步进电机多轴控制器的硬件结构
基于SOPC的步进电机多轴控制器的结构框图如图2所示。其外部电路的构成包含模拟电路和数宇电路两部分。模拟电路包括供电电源及功率驱动。数字电路主要为FPGA芯片及其相关电路。

如图2,基于SOPC的步进电机多轴控制器包含两部分:FPGA芯片及其配置芯片的数字部分和电机控制及位置反馈部分。其中,虚线框内部表示FPGA芯片的内部结构,空心箭头表示FPGA芯片内部的数据连线,实心箭头表示外部连线。FPGA芯片内部由MPU模块、通讯模块、RAM模块、ROM模块、计数器模块、电机控制模块等构成。当控制器失电时,这些模块信息存储在配置芯片中,等到系统重新上电时,FPGA芯片再从配置芯片中读取其配置信息,重构内部模块结构。MPU模块是整个控制器的核心,它的功能等同于事实的微处理器。它通过通讯模块与外部主机进行数据的交换,并将数据存储在RAM模块中。RAM模块同时还用于暂存MPU模块执行ROM模块所存储的程序段时的某些中间过程值,而MPU则根据ROM模块中程序执行的结果输出相应的控制信号给电机控制模块。电机控制模块的输出连接到实际的芯片引脚上,以驱动相应的功率驱动电路工作,从而实现步进电机的运转。在闭环控制时,步进电机轴端的编码器模块输出编码信号。该信号经编码器反馈电路进行隔离等处理之后,由FPGA芯片内部的计数器模块进行计数,并将结果传输给MPU模块进行处理,从而形成位置/速度的闭环控制。图2只表示了单个步进电机闭环控制的结构框图,对于多轴步进电机而言,FPGA芯片只需要增加相应的功率驱动电路及编码器反馈电路即可。电机控制模块和计数器模块都在FPGA内部集成,因而硬件电路的结构较为稳定。
由于IP技术的飞速发展,在图2中的FPGA芯片内部模块中,MPU、ROM、RAM、计数模块等的IP核都可以很方便地获得,而电机控制模块由于与具体的功率放大电路实际相关,因而通常需要用户自行设计。下面介绍这一模块的设计。
2 二相步进电机控制模块结构
以小惯量的二相步进电机为例阐述步进电机控制模块的结构。该步进电机由两片PBL3717a芯片所驱动。其驱动时序及其控制模块如图3、图4所示。


在控制模块中,mtr_cp为步进电机的脉冲输入端,每个脉冲驱动步进电机前进,后退一步,脉冲频率即为步进电机运行的速度,因此这个脉冲信号由MPU模块根据ROM内部程序的执行结果输出。mtr_dir为步进电机的正/反转切换信号,mtr_mode为步进电机全/半步运行方式选择,mtr_on_off是电机的启停位,该位置l时,mtr_cp能够驱动步进电机工作;为O时,mtr_cp脉冲被封锁。设置该位的目的是为了在多个步进电机工作时分别控制各个电机的启停而不影响到其他电机的运行状态。mtr_reset是控制模块复位信号,A_out为图3中下标为A的驱动芯片控制信号,B_out为图3中下标为B的驱动芯片的控制信号。步进电机的控制模块的仿真波形图如图5所示。从图5可以看出,仿真波形完全符合图2中步进电机的驱动时序,即控制模块的设计满足预定的设计需求。
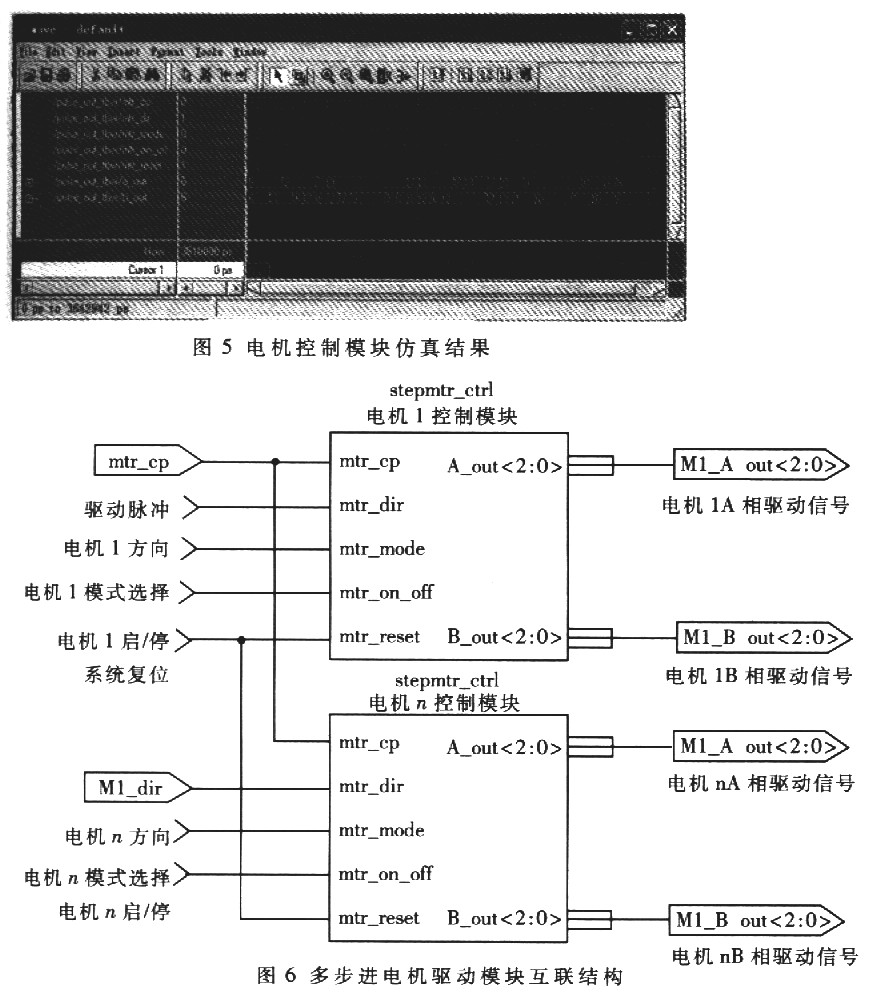
由上分析,利用上述多个步进电机控制模块以图6所示的方式进行适当的连接,就能够构成本文所论述的基于SOPC的步进电机多轴控制器。由于MPU、ROM、RAM、电机控制模块等都是以功能模块的形式集成在FPGA芯片内部,因此大大缩小了基于SOPC的步进电机多轴控制器的尺寸。这些功能模块可以根据实际的应用进行添加或删除(即对FPGA芯片的内部逻辑结构进行重构),因此极大地增强了系统设计的灵活性,能更好地满足不同应用领域的需求。
IP技术的飞速发展使得开发人员很容易获得多数通用模块的可复用IP核,从而减轻了开发人员的负担,缩短了开发周期。当系统需要升级时,也不需要对硬件电路重新设计,只需通过修改FPGA中相应模块的配置文件,因此节约了控制器的升级成本。同时,由于MPU模块的功能与实际的微处理器相同,因而在微处理器上可运行的控制程序也可以很容易移植到MPU模块中运行。为了便于阐述基于SOPC的步进电机多轴控制器,本文侧重于阐述多个步进电机同速恒速运行的情况。对于变速运行的情况,可通过在MPU的脉冲输出端和各电机控制模块的脉冲输入端之间插入MPU可控的分频模块来获得。同时增加插补模块以实现不同电机之间的联动功能。
本文所述的基于SOPC的步进电机多轴控制器应用于半自动生化分析仪的取样针移位系统中,能够实现传统步进电机多轴控制器的所有控制功能,控制器的尺寸小于传统控制器;当控制器的数字电路部分需要修改时,无需更换控制器的实际硬件电路,大大方便了控制器的研究设计工作并节约了相应的开发成本。
引用地址:
基于SoPC的步进电机多轴控制器
推荐阅读最新更新时间:2024-03-30 21:23
STM32F407-用TB6600驱动器驱动57步进电机
一、硬件 1.硬件准备 57步进电机(型号57CM18),驱动器TB6600,开发板STM32F407ZGT6 2.电气特性 3.连线 驱动器右边分有两个区域 Signal:用于驱动器与开发板连接,进行电机的控制驱动。 ENA接口:当此信号有效时,驱动器将自动切断电机绕组电流,使电机处于自由状态(无保持转矩)。当此信号不连接时默认为无效状态,这时电机绕组通以电流,可正常工作。 DIR接口:控制电机旋转方向,信号有效时电机顺时针旋转,无效时逆时针旋转。 PUL接口:步进电机驱动器把控制器发出的脉冲信号转化为步进电机的角位移,驱动器每接受一个脉冲信号 PUL,就驱动步进电机旋转一个步距角,PUL 的频率和步进电机的转速
[单片机]

STM32 SST25VF016B驱动程序
///** // ****************************************************************************** // * @file stm32f10x_SST25VF016B.c // * @brief SST25VF10B驱动程序 // ****************************************************************************** // * @ // * 接口定义(STM32 SPI1) // * CE--PA4 SO--PA6 SCK--PA5 SI--PA7 // * // *
[单片机]
精准电压基准驱动高达200mA,实现0.1ppm/mA负载调整率和10ppm/ºC
加利福尼亚州米尔皮塔斯 (MILPITAS, CA) 2016 年 11 月 3 日 凌力尔特公司 (Linear Technology Corporation) 推出包含两个大电流输出缓冲器的精准电压基准 LT6658。基于一个 2.5V 带隙电压基准,每路输出可单独地配置为 2.5V 至 6V 之间的任何电压。两路输出都提供 0.05% 的初始准确度、10ppm/ C 温度漂移和仅为 1.5ppm 的低频噪声。这些输出可分别驱动高达 50mA 和 150mA,以及吸收高达 20mA。在负载电流高达 150mA 时,典型负载调整率仅为 0.1ppm/mA。在并联时,缓冲器输出可结合以提供甚至更大的电流。 LT6658 非常适合
[模拟电子]
伺服驱动器基本介绍
伺服驱动器(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分, 主要应用于高精度的定位系统。 一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 基本介绍 伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起
[嵌入式]
汽车零件供应商麦格纳展示e4电驱动系统,可使纯电续航提升120km
麦格纳是最大的汽车零件供应商之一,近日在瑞典北部的冬季试驾活动中,麦格纳展示了搭载其最新技术e4电驱动系统的演示车。e4电驱动系统基于捷豹I-PACE打造,但这款车的目的是展示麦格纳可扩展和模块化的电动汽车驱动系统。 该系统在电动汽车效率、驾驶动力和续驶里程方面都有了很大的提升,搭载了这种系统的车型在WLTP工况下纯电续航里程提升高达120km。以捷豹I-Pace为例,现款车型WLTP工况下纯电续航里程为470km,而在使用新系统以后该车的纯电续航里程可增至590km,提升了约25.5%的续航。 e4电驱动系统在前后轴各搭载了一台电动机,组成双电动机全轮驱动系统,前部单元配备有机械差速器,而后部单元则配有双离合
[汽车电子]
基于max7219芯片的大尺寸led数码显示驱动电路设计
Maxim公司的MAX7219芯片用于动态扫描显示驱动,芯片内有可存储显示信息的8x8静态RAM、动态扫描电路以及段、位驱动器。它与通用微处理器有3根串行线相连,最多可驱动8个共阴数码管或64个发光二极管。采用MAX7219芯片实现LED数码显示,具有电路紧凑、可节省CPU的I/O接口、芯片功能强大、编程简单等优点,得到了广大电路设计者认可。然而MAX7219的工作电压为5V,共阴极LED显示驱动,只适用于3.5V以下电压驱动的LED数码管,限制了其使用范围。 本文提出一种基于MAX7219芯片,具有扩展驱动能力的LED数码显示电路。主要应用在大尺寸、高亮度LED数码管的显示电路。 1 电路器件功能简介 1.
[电源管理]
基于PCE061A驱动以太控制芯片RTL8019AS的嵌入式
0 引言
所谓嵌入式设备一般是由嵌入式微处理器、外围设备、特定的网络协议以及应用程序等各部分组成,用于实现对信息家电的远程控制、监视和管理功能,它代替了传统的PC机或网关设备,在数据量不大的情况下能够符合要求,具有可靠灵活、成本低等优点。
1 方案的提出
从信息家电远程在线访问的角度考虑,对信息家电监测和控制时存在两种情况:(1)远程访问时,信息家电的通信数据量不大,56Kbps的通信速率即可满足要求;(2)信息家电对实时性的要求不高,其时延可以在1秒以上。基于以上两个条件在选择嵌入式设备时,选择了单片机SPCE061A作为信息家电接入internet的微处理器,同时采用RTL8019AS作为以
[单片机]
安森美推出带集成升压转换器LED驱动器
高性能、高能效硅解决方案供应商安森美半导体(ON Semiconductor,美国纳斯达克上市代号:ONNN)推出新的6瓦(W)发光二极管(LED)驱动器——CAT4106,该器件具有集成的大功率直流-直流(DC-DC)升压转换器,以及片上诊断功能,能提升能效至最高,应用于较大尺寸的通用液晶显示(LCD)面板背光。
CAT4106是多通道升压型LED驱动器,能够驱动多达40个白光LED——或共4串,每串各10个LED及电压达36伏(V),提供总计达6 W的LED输出功率。该器件还内置诊断功能,自动调节输出电压,以最低的余量(head room)电压驱动最高的正向电压(Vf)串,帮助设计人员提升背光能效至最高,并
[电源管理]
 功率变换器和电气传动的预测控制
功率变换器和电气传动的预测控制 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号