步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。那么你知道步进电机有哪些型号吗?又是如何定义的呢?本文主要介绍步进电机型号定义及选择,首先介绍的是步进电机的特点及分类,其次阐述了步进电机的型号定义及说明,最后介绍了步进电机的选择及注意事项。
步进电机简介
步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
步进电机的特点
1、一般步进电机的精度为步进角的3-5%,且不累积。
2、步进电机外表允许的最高温度。步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3、步进电机的力矩会随转速的升高而下降。当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4、步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
步进电机的分类
1、反应式
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
2、永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
3、混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
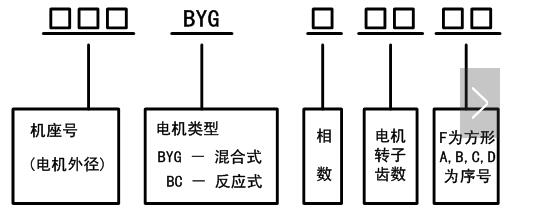
步进电机型号定义
1、步进电机到底有多少型号?
答:28.42.57.86.110.130.
2、这些数字是代表电机尺寸大小吗?
答:这些型号根据电机的底座的直径来命名的。
3、除了BYG还有哪些英文型号,分别代表什么意思?
答:现在用的比较多的都是混合式步进电机了。而且现在这种东西已经国产化了。各个厂家的命名又有所不同。所以不能给你提供更好的解释。
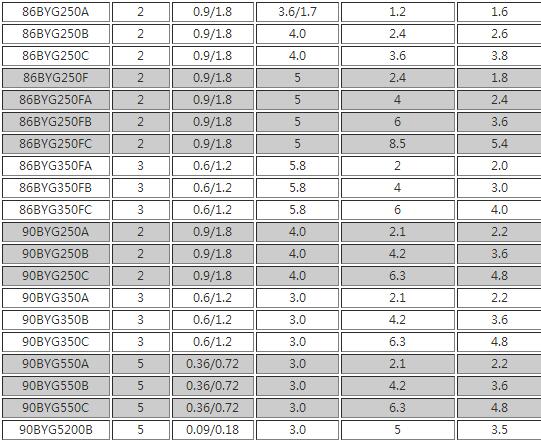
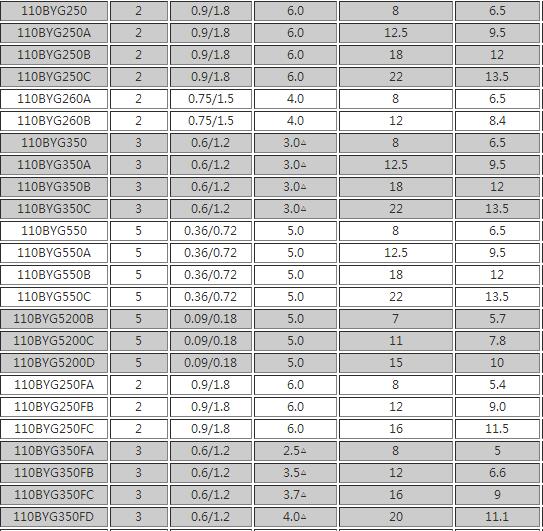
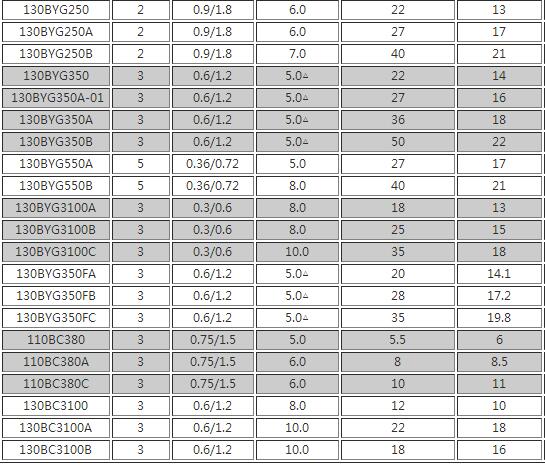
步进电机型号说明
步进电机的选择方法
1、判断需多大力矩:静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。
2、判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。
3、选择电机的安装规格:如57、86、110等,主要与力矩要求有关。
4、确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。
5、根据电机的电流、细分和供电电压选择驱动器。
选用步进电机的注意事项
1、一般应选用力矩比实际需要大百分之五十到百分之百的步进电机,因为步进电机不能过负载运行,即便是瞬间过载都可能造成失步、停转或不规则原地来回作动。
2、上位控制器输入的脉冲电流必须够大(一般要》;10ma),以确保光电耦合器稳定导通,否则会导致步进电机失步;如果输入脉冲频率过高,会因个别脉冲接收不到,导致步进电机失步。
3、启动频率不应太高,应在启动程序中设置加速过程,即从规定的启动频率开始,加速到设定频率,否则就可能不稳定,甚至处于惰态。
4、电机如果未固定好,造成强烈共振,也会导致步进电机失步。
5、应了解步进电机的固有弱点:输入脉冲频率过高,易导致丢步;输入脉冲频率过低,易出现共振;转速偏高时扭矩降低明显。
6、应了解最新型步进电机的性能,必要时选用采用了最新控制技术的高级步进电机系统,高级系统既可以使步进电机在高速状态下减少共振,还能运用减少步进电机反电动势的技术,增加电机在高速状态下的扭矩。
上一篇:步进电机选型原则你都知道吗_步进电机选型误区盘点
下一篇:伺服电机选型计算最简单方式_伺服电机的工作原理
推荐阅读最新更新时间:2024-03-30 22:01

 步进电机驱动控制技术及其应用设计研究
步进电机驱动控制技术及其应用设计研究 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}