现代交流伺服系统,经历了从模拟到数字化的转变,数字控制环已经无处不在,比如换相、电流、速度和位置控制;采用新型功率半导体器件、高性能DSP加FPGA、以及伺服专用模块(比如IR推出的伺服控制专用引擎)也不足为奇。本文主要介绍了现代交流伺服系统原理及控制方法,具体的跟随小编一起来了解一下。
现代交流伺服系统原理
交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。
目前主流的伺服驱动器均采用数字信号处理器(dsp)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(ipm)为核心设计的驱动电路,ipm内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
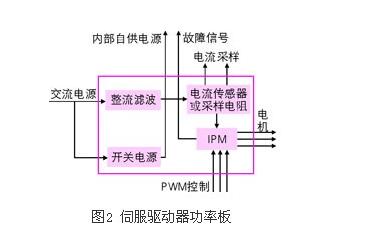
伺服驱动器大体可以划分为功能比较独立的功率板和控制板两个模块。如图2所示功率板(驱动板)是强电部,分其中包括两个单元,一是功率驱动单元ipm用于电机的驱动,二是开关电源单元为整个系统提供数字和模拟电源。
控制板是弱电部分,是电机的控制核心也是伺服驱动器技术核心控制算法的运行载体。控制板通过相应的算法输出pwm信号,作为驱动电路的驱动信号,来改逆变器的输出功率,以达到控制三相永磁式同步交流伺服电机的目的。
功率驱动单元
功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦pwm电压型变频器来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是ac-dc-ac的过程。整流单元(ac-dc)主要的拓扑电路是三相全桥不控整流电路。
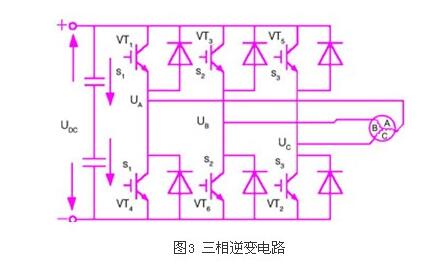
逆变部分(dc-ac)采用采用的功率器件集驱动电路,保护电路和功率开关于一体的智能功率模块(ipm),主要拓扑结构是采用了三相逆变电路原理图见图3,利用了脉宽调制技术即pwm(pulse width modulaTIon)通过改变功率晶体管交替导通的时间来改变逆变器输出波形的频率,改变每半周期内晶体管的通断时间比,也就是说通过改变脉冲宽度来改变逆变器输出电压副值的大小以达到调节功率的目的。
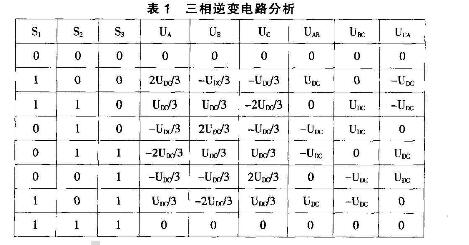
图3中vt1~vt6是六个功率开关管,s1、s2、s3分别代表3个桥臂。对各桥臂的开关状态做以下规定:当上桥臂开关管“开”状态时(此时下桥臂开关管必然是“关”状态),开关状态为1;当下桥臂开关管“开”状态时(此时下桥臂开关管必然是“关”状态),开关状态为0。三个桥臂只有“0”和“1”两种状态,因此s1、s2、s3形成000、001、010、011、100、101、111共八种开关管模式,其中000和111开关模式使逆变输出电压为零,所以称这种开关模式为零状态。输出的线电压为uab、ubc、uca,相电压为ua、ub、uc,其中udc为直流电源电压,根据以上可得到附表分析。
控制单元
控制单元是整个交流伺服系统的核心,实现系统位置控制、速度控制、转矩和电流控制器。所采用的数字信号处理器(dsp)除具有快速的数据处理能力外,还集成了丰富的用于电机控制的专用集成电路,如a/d转换器、pwm发生器、定时计数器电路、异步通讯电路、can总线收发器以及高速的可编程静态ram和大容量的程序存储器等。伺服驱动器通过采用磁场定向的控制原理(foc) 和坐标变换,实现矢量控制(vc),同时结合正弦波脉宽调制(spwm)控制模式对电机进行控制。永磁同步电动机的矢量控制一般通过检测或估计电机转子磁通的位置及幅值来控制定子电流或电压,这样,电机的转矩便只和磁通、电流有关,与直流电机的控制方法相似,可以得到很高的控制性能。对于永磁同步电机,转子磁通位置与转子机械位置相同,这样通过检测转子的实际位置就可以得知电机转子的磁通位置,从而使永磁同步电机的矢量控制比起异步电机的矢量控制有所简化。
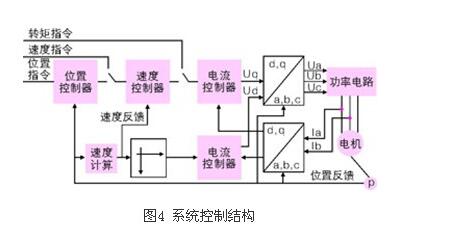
伺服驱动器控制交流永磁伺服电机(pmsm)伺服驱动器在控制交流永磁伺服电机时,可分别工作在电流(转矩)、速度、位置控制方式下。系统的控制结构框图如图4所示由于交流永磁伺服电机(pmsm)采用的是永久磁铁励磁,其磁场可以视为是恒定;同时交流永磁伺服电机的电机转速就是同步转速,即其转差为零。这些条件使得交流伺服驱动器在驱动交流永磁伺服电机时的数学模型的复杂程度得以大大的降低。从图4可以看出,系统是基于测量电机的两相电流反馈(ia、ib)和电机位置。将测得的相电流(ia、ib)结合位置信息,经坐标变化(从a,b,c坐标系转换到转子d,q坐标系),得到id、iq分量,分别进入各自得电流调节器。电流调节器的输出经过反向坐标变化(从d,q坐标系转换到a,b,c坐标系),得到三相电压指令。控制芯片通过这三相电压指令,经过反向、延时后,得到6路pwm波输出到功率器件,控制电机运行。系统在不同指令输入方式下,指令和反馈通过相应的控制调节器,得到下一级的参考指令。在电流环中,d,q轴的转矩电流分量(iq)是速度控制调节器的输出或外部给定。而一般情况下,磁通分量为零(id=0),但是当速度大于限定值时,可以通过弱磁(id《0),得到更高的速度值。
从a,b,c坐标系转换到d,q坐标系有克拉克(clarke)和帕克(park)变换来是实现;从d,q坐标系转换到a,b,c坐标系是有克拉克和帕克的逆变换来是实现的。
现代交流伺服系统的控制方法
1、转矩控制
转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小。
2、位置控制
位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
3、速度模式
通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
现代交流伺服系统的应用
现代交流伺服系统最早被应用到宇航和军事领域,比如火炮、雷达控制。逐渐进入到工业领域和民用领域。工业应用主要包括高精度数控机床、机器人和其他广义的数控机械,比如纺织机械、印刷机械、包装机械、医疗设备、半导体设备、邮政机械、冶金机械、自动化流水线、各种专用设备等。其中伺服用量最大的行业依次是:机床、食品包装、纺织、电子半导体、塑料、印刷和橡胶机械,合计超过75%。
上一篇:打印机以及工装夹具制作软件和生产级设备
下一篇:一文解析交流永磁同步伺服系统的现状与发展
推荐阅读最新更新时间:2024-03-30 22:02

- 热门资源推荐
- 热门放大器推荐
 华中数控系统装调与实训
华中数控系统装调与实训- 企业文化分享 如何培养稀缺的硅IP专业人员?SmartDV开启的个人成长与团队协作之旅
- 新帅上任:杜德森博士(Dr. Torsten Derr)将于2025年1月1日出任肖特集团首席执行官
- 英飞凌推出简化电机控制开发的ModusToolbox™电机套件
- 意法半导体IO-Link执行器电路板为工业监控和设备厂商带来一站式参考设计
- SABIC进一步深化与博鳌亚洲论坛的战略合作伙伴关系
- 使用 3.3V CAN 收发器在工业系统中实现可靠的数据传输
- 尼得科精密检测科技将亮相SEMICON Japan 2024
- 浩亭和美德电子(TTI)宣布战略合作伙伴关系现已扩展至亚洲
- Samtec连接器科普 | 链接智能工厂中的人工智能




 京公网安备 11010802033920号
京公网安备 11010802033920号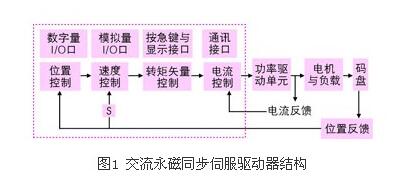{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}