鉴于目前单一的普通类型的火灾探测报警器已不能满足需求,采用多个传感器全面采集火灾发生前的各种异常信息,并用多传感器信息融合技术处理传感器提供的火灾信息,可以大大地提高整个报警监测系统的可靠性。
1系统硬件设计
本方案硬件系统的核心控制器是采用三星的具有ARM920T核的16/32位多功能、低功耗的嵌入式处理器S3C2440。S3C2440是韩国三星公司推出的一款高档的,可用于工业控制、智能家电等便携产品开发的嵌入式微处理器,其主频处理速度达到400MHz,完全可以满足火灾监控报警的实时性处理要求。其主控制芯片及丰富的外围接口电路可用于连接各类数字设备从而实现数据交换。基于多传感器数据融合的火灾预警系统采用模块化结构,主要由传感器模块、A/D转换模块、S3C2440控制器、报警模块、执行模块和控制器必需的电源模块和存储器模块组成,图1为系统结构图。

多传感器模块由多组传感器组成,每组传感器由温度传感器,可燃气体探测器和烟雾探测器组成,在该系统中温度传感器采用法国HuMIREL公司的HM500,它们具有成本低、体积小、寿命长、选择性和稳定性好等特性;可燃气体探测器选用了深圳市吉安达科技公司最新开发的红外气体传感器,探测器安装于被测气体容易泄露的室内、外危险场所,它们能够灵敏地感知空气中的低浓度污染气体,分别对空气中的异味、CO、H、O有较高的敏感度,甚至能检测到几个ppm级污染气体含量;烟雾探测器采用美国通用GE烟雾探测器514C,具有自诊断功能,漂移补偿抗灰尘引起的干扰的能力。以上传感器完成对火灾过程的多参数进行监测,通过A/D转换模块将检测的数据传送给S3C2440控制器并配以智能判别技术,可以达到提前预警、减少漏报误报、提高可靠性的目的。本设计中采用的A/D转换模块是TI公司的12位高速并行转换器ADS805,具有采样速度高,稳定性好的特点。
S3C2440控制器的核采用一款16/32-bitRISC微处理器,采用6层板工艺,具有低功耗,高速的处理计算能力的特点,简单稳定的设计非常适合对电源要求较高的产品上。采用了新的总线构架(AMBA),其内核为32bit的先进处理器。其主频最高可达到533MHz,在处理大量传感器数据情况下,完全可以保证实时性的要求。其电源管理模块能够提供系统多种电压供电,包括芯片内核电压采用1.8V供电,芯片的I/O部分采用3.3V供电。而片外的一些常规集成电路又采用5V供电。智能电源管理模块很好地解决了对系统各个部分供电要求的不同,降低了功耗,减少了不同电源之间的干扰噪声,提高了系统的集成度。它的存储器模块包括两片SDRAM共64MB和一片64MNandflash(K9F1208)并且可根据存储容量要求选配其他容量Nandflash存储器,存储器模块用来存储系统运行程序和传感器采集的火灾监控过程的数据。
报警模块主要当判断有火险发生时,启动声光报警信号来通知值班人员,从而采取相应的措施;执行模块完成火险发生时启动附近的灭火装置,使火灾的危害降低到最小的程度。
2系统软件设计
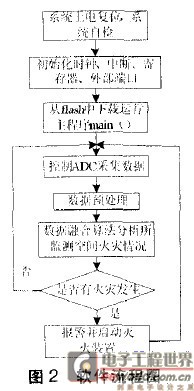
该系统的软件部分主要包括系统的上电初始化、系统自检、初始化时钟、中断设置、外设初始化,然后运行主程序main()函数,建立任务后,扩展口对ADC进行控制切换通道采集数据。对数据进行平滑滤波、标定补偿等预处理后,来通过数据融合算法分析火灾发生情况,判断是否报警并循环检测。系统软件流程如图2所示。
与一般的数据采集处理系统不同。本系统的数据采集软件和数据处理软件均在处理器上运行,系统软件除了要不断采集最新的火灾现场数据外,还要进行实时地数据处理。以8/16位单片机为核心的测控系统。程序一般采用前后台方式编写。后台运行一个大的无限循环。前台为多个中断。这种方式在程序规模增大、系统功能较复杂,尤其是系统中的并发模块较多的情况下,主显得力不从心,很难保证测量、控制的实时性。而且编程困难、不便于增加功能。综合考虑软件复杂度、运算量、实时性要求,系统采用μCOS-II操作系统。
本系统中大部分任务通过调用OSTimeDly()实现定时运行,每个任务都可通过系统函数赋予不同的定时时间间隔。ADC数据采集程序,数据处理程序和数据融合算法程序主要由嵌入式C语言来编写。
3数据融合算法
将多传感器信息融合技术应用于工业过程监测系统中,已经取得了一些工程应用。在这类系统中,传感器从对象和环境中采集到数据后,先进行数据融合处理,然后再参与控制策略运算。目前,常用的信息融合方法大致分为以下几类:一是基于估计和统计的经典方法,包括加权平均法、最小二乘法和D-S证据理论等;二是信息论的融合,包括模板法、聚类分析的熵理论等;三是人工智能的融合方法,包括模糊逻辑、产生式规则、神经网络、遗传算法和模糊积分理论以及专家系统等。
在应用于多传感器信息融合时,我们将A看作系统可能决策的集合,B看作传感器的集合,A和B的关系矩阵RA+B中的元素μi表示由传感器i推断决策为i的可能性,X表示各传感器判断的可信度,经过模糊变换得到的Y就是各决策的可能性。
具体的,我们假设有m个传感器对系统进行观测,而系统的决策可能有n个,则:
A:{y1/决策、y2/决策、…、yn/决策n}
B:{x1/传感器、x2/传感器、…、xn/传感器m}
传感器对各个决策的判断用定义在A上的隶属函数表示,设传感器i对系统的判断结果是:
μi1/决策,μi2/决策,…,μin/决策n,0≤μy≤1
即认为结果为决策j的可能性为μij,记作向量μi1,μi2,μi3,…μin,则m个传感器构成A×B的关系矩阵为:

将各传感器判断的可信度用B上的隶属度:X={x1/传感器1×x2/传感器2…、xn/传感器n}表示,那么,根据Y=X*RA*B进行模糊变换,就可得出:y=(y1,y2,y3,…,yn)
即综合判断后的各决策的可能性为y,最后,对各可能判决按照一定的准则(比如最大隶属度方法、中心法等)进行选择,得出最优结果。根据运算的y值,采用以下规则进行判决应注意:①判决结果应有最大的隶属度。②判决结果的隶属度与必须大于某一阀值(一般情况取0.5)。③判决结果的隶属度与其它判决的隶属度值的差必须大于某一阀值(比如0.1)。
4火灾监测的数据融合试验
本设计对火灾监测使用了温度传感器,可燃气体探测器的烟雾探测器,数据融合的方法如图3。
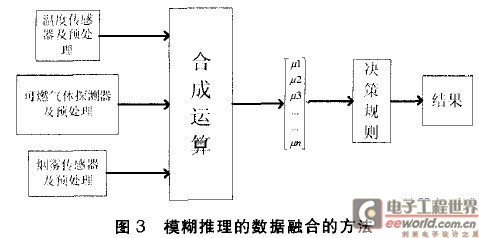
图3基于模糊推理的数据融合的一般方法是在火灾故障监测系统中,首先确定各个传感器的权重,在设计中我们设定温度传感器,可燃气体探测器的权重分别为W1=0.5,W2=0.3,W3=0.2;将最后的判决结果分为两种:有火灾Y1和无火灾Y2;根据当前的工作状态,确定每个传感器X对于每一判决Y的隶属函数;再进行线性变换运算,即可确定最后的结果。
比如,在某时刻,根据温度传感器的数据确定有无火灾的隶属度分别为μ11=0.45,μ12=0.55,根据烟雾传感器的数据确定有无火灾的隶属度分别为μ31=0.9,μ32=0.1,采用线性变换运算得Y,

根据结果得有火灾隐患,应该启动气溶灭火器。表1是模糊融合在火灾故障监测系统中的试验数据。

5结束语
将模糊推理数据融合方法应用到多传感器的电缆火灾故障监测系统,与单一的传感器相比,具有更高的准确性的可信度。运行结果表明,这种方法对提高火灾故障检测的可靠性是实用和有效的,可降低火灾报警的误报率。但是,这种方法也有一些缺点,比如传感器的权重和每一传感器对判决的隶属度值的分配方面,没有形成统一的理论,需要依靠经验进行设置。
上一篇:在微控制器市场危机中收获成功
下一篇:基于嵌入式微处理器S3C44B0X音频文件播放
推荐阅读最新更新时间:2024-03-16 12:26

 嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版
嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- 【STM32H7教程】第13章 STM32H7启动过程详解
- 【STM32H7教程】第14章 STM32H7的电源,复位和时钟系统
- 【STM32H7教程】第15章 STM32H7的GPIO基础知识(重要)
- 【STM32H7教程】第16章 STM32H7必备的HAL库API(重要)
- 【STM32H7教程】第17章 STM32H7之GPIO的HAL库API
- 【STM32H7教程】第18章 STM32H7的GPIO应用之跑马灯
- 【STM32H7教程】第19章 STM32H7的GPIO应用之按键FIFO
- 【STM32H7教程】第20章 STM32H7的GPIO应用之无源蜂鸣器
- 【STM32H7教程】第21章 STM32H7的NVIC中断分组和配置(重要)
- 碳化硅(SiC)在五大领域正引领着高科技发展




 京公网安备 11010802033920号
京公网安备 11010802033920号