1 前言
机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术。一些发达国家已把机器人制作比赛作为创新教育的战略性手段。如日本每年都要举行诸如“NHK杯大学生机器人大赛”、“全日本机器人相扑大会”、“机器人足球赛”等各种类型的机器人制作比赛,参加者多为学生,旨在通过大赛全面培养学生的动手能力、创造能力、合作能力和进取精神,同时也普及智能机器人的知识.[1]
开展机器人的制作活动,是培养大学生的创新精神和实践能力的最佳实践活动之一,特别是机电专业学生开展综合知识训练的最佳平台。本文针对具有引导线环境下的路径跟踪这一热点问题,基于单片机控制及传感器原理,通过硬件电路制作和软件编程,制作了一个机器人,实现了机器人的路径跟踪和自动纠偏的功能,并能探测金属,实时显示距离。
2 机器人要完成的功能
选取一块光滑地板或木板,上面铺设白纸,白纸上画任意黑色线条(线条不要交叉),作为机器人行走的轨迹,引导机器人自主行走。纸下沿黑线轨迹随机埋藏几片薄铁片,铁片厚度为0.5~1.0mm。机器人沿轨迹行走一周,探测出埋藏在纸下铁片,发出声光报警,并显示铁片距离起点的位置。
3 硬件设计方案
机器人总体构成

图1机器人总体构成
如图1所示,以微处理器为核心,接受传感器传来外部信息,进行处理,控制机器人的运行。
系统电源供电部分
由于机器人电机,传感器及系统CPU等部分均采用+5V供电,考虑电动车功率和车载质量及摩擦阻力问题,电源我们采用电动车自带干电池组,功耗小、体积小和质量轻,安装较为方便。
电机驱动及PWM调速部分
机器人需控制在一个合适的速度行驶,速度太快,因单片机对各传感器传来的信号有一个响应、处理时间,小车极易偏离轨道。小车的速度是由后轮直流电机转速控制,改变直流电机转速通常采用调压、调磁等方式来实现。其中,调压方式原理简单,易与实现。
采用由晶体管组成的H型PWM调制电路。通过图2所示PWM调制电路,用单片机控制晶体管使之工作在占空比可调状态,实现调速。

图2 电机驱动电路
令单片机P1.7口为低电平,P1.6口为高电平,此时Q1、Q4导通,Q2、Q3截止,电动机正常工作。改变P1.6口高电平周期,即改变PWM调制脉冲占空比,可以实现精确调速。脉冲频率对电机转速有影响,脉冲频率高连续性好,但带负载能力差;脉冲频率低则反之[2]。经实验发现,脉冲频率在30Hz 以上,电机转动平稳,但小车行驶时,由于摩擦力使电机转速降低很快,甚至停转;脉冲频率在10Hz以下,电机转动有跳跃现象,实验证明脉冲频率在 25~35Hz效果最佳。我们选取脉冲频率为30Hz。
引导线检测模块
根据白纸和黑线反射系数不同,通过以光电传感器为核心的光电检测电路将路面两种颜色进行区分,转化为不同电平信号,将此电平信号送单片机,由单片机控制转向电机作相应的转向,保证小车沿引导线行驶。考虑到小车与路面的相对位置,采用反射式光电检测电路。
红外光电传感器TCRT1000,它是一种光电子扫描,光电二极管发射,三极管接收并输出的装置 .它的特点是尺寸小、使用方便、信号高输出、工作状态受温度影响小。它的外围电路简单,(如图3所示)。二极管的C端和三极管的E端接地,二极管的A端通过一电阻和电源相接,组成偏置电流电路;三极管的C端也通过一电阻和电源相接,组成输出电路。当检测器检测到白色时,其输出低电平;当检测到黑色时,则输出高电平。
为提高检测精度,采用了多传感器信息融合技术。设计中,在车头均匀布置三个光电传感器,其中,中间一个(Q1)安装在小车正中央。Q1的输出经一级比较器和非门,接单片

图3 光电检测转换电路
机的P1.3脚.Q1左右两端分别布置一个传感器,经与图3相同的电路后也连接到单片机P1口。若两侧某一传感器检测到黑线,表明小车正脱离轨道,将3个检测点的结果融合后作为单片机的输入,机器人按照单片机P1口信息进行判断调整,实现路径跟踪和自动纠偏[3]。
金属探测部分
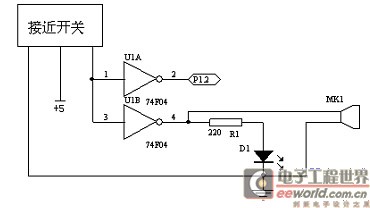
图4 金属探测电路
如图4所示,金属探测器使用一接近开关,探测有效距离约为4mm,将它固定在机器人上,当探测到金属片时,探测器输出端输出低电平,经反向器后接一发光二极管和一蜂鸣器,发出声光指示信号。同时输出反向后接单片机,对探测到的金属片个数进行计数。
霍尔元件测距设计
霍尔集成片内部由三片霍尔金属板组成,当磁铁正对金属板时,根据霍尔效应,金属板发生横向导通[4],因此可以在车轮上安装磁片,而将霍尔集成片安装在固定轴上,通过对脉冲计数进行距离测量。小车后轮每转一圈,霍尔元件产生的脉冲送入单片机的T0口进行计数,单片机完成脉冲数到距离的转换。在后轮安装一个磁极,测量误差是一个车轮的周长,可在软件中给予补偿。
LCD显示
液晶显示器以其微功耗、体积小、显示内容丰富、超薄轻巧的诸多优点,在袖珍式仪表和低功耗应用系统中得到越来越广泛的应用。 这里采用2行16个字的DM-162液晶模块,通过与单片机连接,编程,完成显示功能。
4 系统软件流程
系统软件流程如图5所示。

图5 系统软件流程图
5 结论
本文基于单片机及传感器原理,以单片机为控制器的核心,小型直流电机作为驱动元件,配置不同类型的传感器,通过软件编程,制作出了一个价格低廉、模块化结构的小型机器人。大量的行走实验证明,该机器人能够顺利路径跟踪和自动纠偏自主行走,并完成探测、显示等功能。
本文作者创新点:本文针对具有引导线环境下的路径跟踪这一热点问题,采用多传感器信息融合技术,通过单片机控制,实现了机器人的路径跟踪和自动纠偏的功能,方法简单,易于实现,造价低廉,效果较好。
上一篇:基于μPD7单片机的LED智能照明控制系统的设计
下一篇:基于STC单片机的经济型步进电机控制系统
推荐阅读最新更新时间:2024-03-16 12:26

 汽车用传感器(董辉 编)
汽车用传感器(董辉 编) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1416 借助 DMA 将内存图像旋转 90 度
- 【下载】LAT1426 IAR flashloader 下载算法制作介绍
- 【下载】LAT1431 STM32 AI Model Zoo 的安装及实例介绍
- 【下载】LAT1435 使用 GPDMA 进行 SPI LCD 整屏传输
- 【下载】LAT1438 AFCI 上位机用户手册
- 【下载】LAT1440 如何在特定串口工具上以不同颜色显示信息








- Microchip推出新款交钥匙电容式触摸控制器产品 MTCH2120
- Matter对AIoT的意义:连接AIoT设备开发人员指南
- 我国科学家建立生成式模型为医学AI训练提供技术支持
- Diodes 推出符合车用标准的电流分流监测器,通过高精度电压感测快速检测系统故障
- Power Integrations面向800V汽车应用推出新型宽爬电距离开关IC
- 打破台积电垄断!联电夺下高通先进封装订单
- Ampere 年度展望:2025年重塑IT格局的四大关键趋势
- 存储巨头铠侠正式挂牌上市:首日股价上涨超10%
- Vishay 推出新款精密薄膜MELF电阻,可减少系统元器件数量,节省空间,简化设计并降低成本
- 芯原推出新一代高性能Vitality架构GPU IP系列 支持DirectX 12和先进的计算能力
- TI 嵌入式处理主题直播月|报名观看直播赢好礼【低功耗WiFi MCU、Sitara AM57X平台、机器学习】
- 意法半导体工业峰会2019( 深圳 )
- 【XILINX 主题分享月】 低功耗资料大搜集!
- 是德科技——从容应对医疗电子设备设计和测试的挑战! 答题有好礼
- 新年新挑战:ST蓝牙开发板免费申请评测+挑战赛(littleshrimp带队)
- 发原创书评 赢MSP430开发板
- 【社区大讲堂】揭秘ADI实验室电路!
- 有奖直播【Keysight World Tech Day 2023分论坛——汽车自动驾驶与新能源】
- DIY电子钟套件,有兴趣来做啊
- 了解并观看是德科技汽车电子、物联网(IOT)精彩专题,下载技术文章送好礼!




 京公网安备 11010802033920号
京公网安备 11010802033920号