数据采集系统中由于单片机侧重于控制,数据处理能力较弱,对采集的数据进行运算处理比较繁琐,如果通过串口与上位机通信,利用上位机强大的数据处理能力和友好的控制界面对数据进行处理和显示则可以提高设计效率。串口通信以其简单的硬件连接,成熟的通信协议,成为上下位机之间通信的首选。移植了Linux 操作系统的s3c2440 可以在Linux 环境下操作串口,降低了串口操作的难度,可以使开发者集中精力开发大规模的应用程序,而不必在操作底层设计上耗费时间。
1 硬件连接
s3c2440 是三星公司生产的基于ARM9 核的处理器,采用3.3 V 电压供电; C8051Fxxx 系列单片机是美国CYGNAL 公司推出的与8051 兼容的高性能高速单片机,采用3.3 V 电压供电。两者供电电压相同,所以进行串行口通信时不需要进行电平转换。硬件连接采用最常用的TXD,RXD,GND 三线连接方式。注意采用交叉连接方式,即TXDRXD,RXDTXD.
2 Linux 下串口通信
2.1 Linux 下串口设备描述
s3c2440 上移植了Linux 2.6.32 操作系统,加载了s3c2440 的串口驱动程序,通过Linux 提供的串口操作函数和文件操作函数把对串口的操作等同于文件操作,降低了串口的操作难度,提高了效率。在程序中设备和文件都是通过文件描述符来操作的,文件描述符在Linux 内核中是一个非负整数。Linux 设备文件都存放在“/dev”目录下,串口也不例外,在/dev 中可以找到串口对应的设备文件,本文对应的串口1 的设备文件路径是“/dev /ttySAC1”.
2.2 Linux 下串口通信程序设计
串口通信需要设置一些参数,如波特率、数据位、停止位,输入输出方式等。这些参数都存在于Linux提供的termios 结构中,该结构是Linux 系统用于查询和操作各个终端的一个标准接口,定义在头文件< ter-mios. h > 中,如下所示:
STruct termios{tcflag_t c_iflag; /* 输入标志* /tcflag_t c_oflag; /* 输出标志* /tcflag_t c_cflag /* 控制标志* /tcflag_t c_lflag /* 本地标志* /cc_t c_cc[NCCS]; /* 控制特性* /} ;Linux 串口通信步骤可分为以下三步,操作流程如图1 所示。
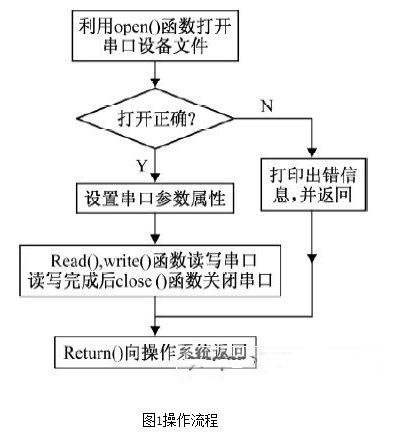
第一步: 打开串口调用open( ) 函数打开串口设备文件,若出错则返回- 1,成功则返回文件句柄。
#define UART1 /dev /ttySAC1int fd;fd = open( “UART1”,O_RDWR) /* 以可读可写方式打开串口设备* /
第二步: 设置串口属性函数tcsetattr ( ) 可以设置串口的结构属性,tcgetatt( ) 可以得到串口的结构属性。在termios 结构中,? &=s ?最重要的是c_cflag,用户通过对其进行赋值可以实现串口波特率、数据位、停止位、奇偶校验位等参数的设置。c_cc 数组中的两个变量VMIN 和VTIME 判断是否返回输入,c _cc[VTIME]设定字节输入时间计时器,c _cc[VMIN]设定满足读取功能的最低接收字节数。这两个变量的值要设定合理,才能保证串口的通信成功率。
int set_attr( int fd){struct termios newtio,oldtio;tcgetattr( fd,&oldtio) ;cfsetispeed( &newtio,B9600) ; /* 设置读波特率为9600* /cfsetospeed( &newtio,B9600) ; /* 设置写波特率为9600* /memset( &newtio,0, sizeof( newtio) );newtio. c_cflag = CS8 | CREAD; /* 设置数据位为8 位并且使能接收* /newtio. c_cflag & = ~ PARENB; /* 不进行奇偶校验* /newtio. c_cflag & = ~ CSTOPB; /* 1 位停止位* /newtio. c_cc[VMIN]= 1; /* 当接收到一个字节数据就读取* /newtio. c_cc[VTIME]= 0; /* 不使用计时器* /tcflush( fd,TCIOFLUSH) ; /* 刷清输入输出缓冲区* /tcsetattr( fd,TCSANOW,&newtio) /* 使设置的终端属性立即生效* /}
第三步: 串口读写,串口关闭设置完通信参数后,就可以用标准的文件读写命令read( ) 和write( ) 操作串口了。最后在退出之前,用close( ) 函数关闭串口。
void rd_wr( ){write( fd,wbuf,10) ;usleep( 500000) ; /* 延时50 ms 等待下位机发送数据* /read( fd, rbuf,10) ;printf( “read string is %s ”, rbuf) ;}
3 通信程序设计ARM 与单片机的串口通信程序包括两方面: 一方面是作为上位机的ARM 的串口通信程序,另一方面是作为下位机的单片机的串口通信程序。在通信之前必须制定合理的通信协议以保证通信的可靠性和成功率。现约定双方通信协议如下:
( 1) 波特率为9600 bit /s,帧格式为1 - 8 - N - 1( 1 位起始位,8位数据位,无奇偶校验,1位停止位) ;( 2) 由于上位机ARM 的速度远远高于下位机单片机的速度,所以采用上位机主动联络,下位机等待的方式。在数据传送前ARM 先发送联络信号/0xaa,单片机收到后回答一个/0xbb,表示可以发送,否则继续联络;( 3) 单片机端可以有中断和查询方式收发串口数据。本文采用中断方式;( 4) ARM 处理器s3c2440 采用UART1 和单片机通信,UART0 则作为s3c2440 终端控制台。
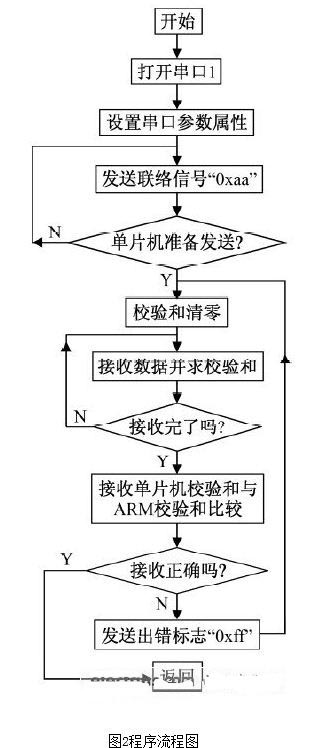
3.1 上位机ARM 的通信程序设计
由于s3c2440 移植了定制和裁剪后的Linux2.6.32内核的操作系统,对串口的操作采用上述的Linux 下串口操作方法,程序流程图如图2 所示。[page]
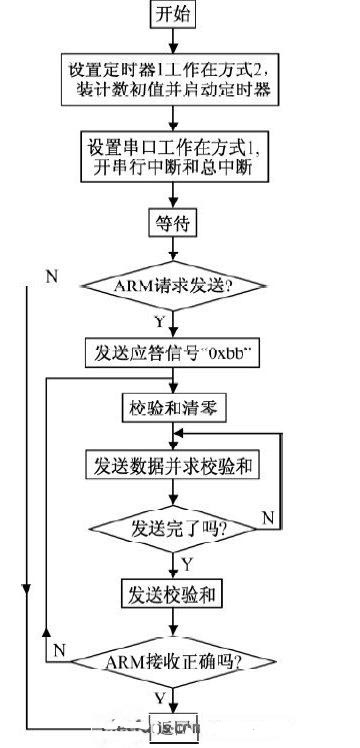
3.2 下位机单片机的通信程序设计
选用C8051F021 的定时器T1 作为波特率发生器,晶振采用11.0592 MHz,定时器工作在方式2,计数初值为0xfd,串口工作在串行方式1( 1 - 8 - N - 1) ,采用中断方式收发数据。
4 结束语
随着近年来嵌入式Linux 在国内的应用范围日益壮大,基于ARM 平台的嵌入式Linux 设备也将会越来越多地用在数据采集中作为上位机对数据进行处理、显示、存储、发送。本文所介绍方案适用于大多数场合Linux 下ARM 和单片机的串口通信设计,设计人员只需根据自己的实际需要修改或重新制定通信协议即可。另外需要注意的是由于上位机ARM 的速度比单片机快很多,所以一次不能发送过多的数据,否则极有可能使发送缓冲区溢出而出现数据丢失的现象,开发人员要根据通信双方设备的状况选择合适的帧长度,以达到最佳的传输状态。
上一篇:基于ARM的低功耗语音去噪系统设计
下一篇:基于ARM7的图像数据采集系统的研究与应用
推荐阅读最新更新时间:2024-03-16 13:15

 单片机创新实践应用.
单片机创新实践应用. 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- 分享赢开发板:告诉小伙伴,2018年ST全国巡回研讨会开始啦
- 下载《TI MCU与无线连接技术研讨会讲座实录》抽奖赢好礼!
- 英飞凌考考你关于AI芯片的冷知识
- 开启Altera SoC体验之旅,玩转Altera Cyclone V系列SoC
- 免费申请 | Nordic Semiconductor nPM1300-EK PMIC 评估套件
- phyBOARD-i.MX 8M Plus 开发板来袭 免费申请进行时!
- 剁手不如玩板,这个双11免费好板等你来玩!
- ADI有奖下载活动之16 太阳能光伏逆变器解决方案
- 瑞萨电子 RL78/G11 目标板免费申请中,参与申请也能赢好礼
- 关注 PI 最新 SCALE-iDriver IC产品系列 答题有好礼!




 京公网安备 11010802033920号
京公网安备 11010802033920号