笔者曾经使用STM32F103做过些小东西,想着迁移到F407应该很容易,未曾想事情并不简单,有很多坑被我踩到了。本文主要讲述利用建立STM32F407的USART2与HC06蓝牙模块进行通信。本文写的尽量详细简单,让初学ARM的新手也能看懂,同时也涉及到一些容易出错的细节,供大家参考和指正。
本文主要分下面几块来写:
串口通信原理
想必玩过一点单片机的人都懂一点串口通信,而恐怕我们印象中的串口通信不过如此,两个芯片通过串口通信,需要共地、Tx(发送)和Rx(接收)相互连接即可: 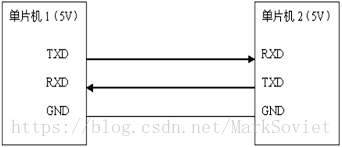
而实际上,串口通讯种类繁多,即使是通用异步收发器UART也有RS-232和RS-485等不同接口,有兴趣可以深入学习。
首先串口通信指的是一种设备通信的协议而不是指接口。串口通信的概念非常简单,串口按位(bit)发送和接收字节。而我们所使用的USART和UART的区别是可以同步,你在STM32的datasheet里可以看到USART2_CK,而实际上我们很少使用,我们完全可以把USART当UART来用。
HC06蓝牙模块
无线蓝牙透传模块。
默认名字HC06、波特率9600bps、配对密码00000。
—— [ HC06的datasheet ]

用Arduino的时候想必是很傻瓜式的,如果用STM32来做还是要了解一番的。
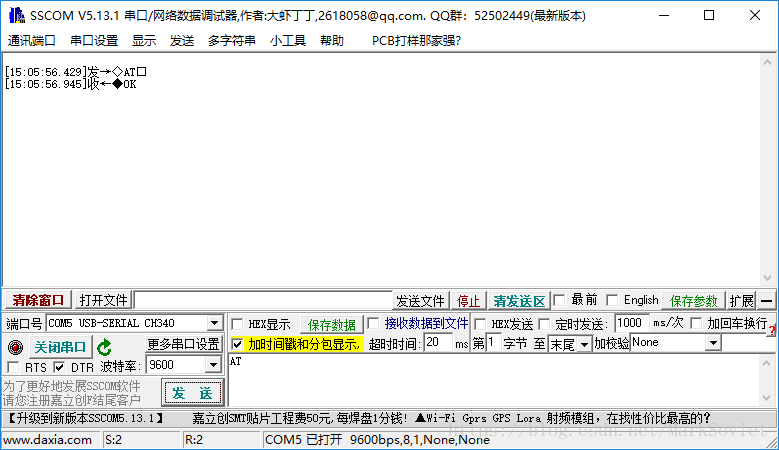
首先好好看一下datasheet,看一下AT指令集,然后用一个USB转TTL的模块(这里用的是CH340)和电脑连接:
可以看到HC06的指示灯一直在闪,说明蓝牙未连接。打开串口助手,试一试AT指令是否有效,然后你就可以设置波特率(建议就选默认的9600,据说快了会降低通信的稳定性),改名字和密码,详见datasheet。

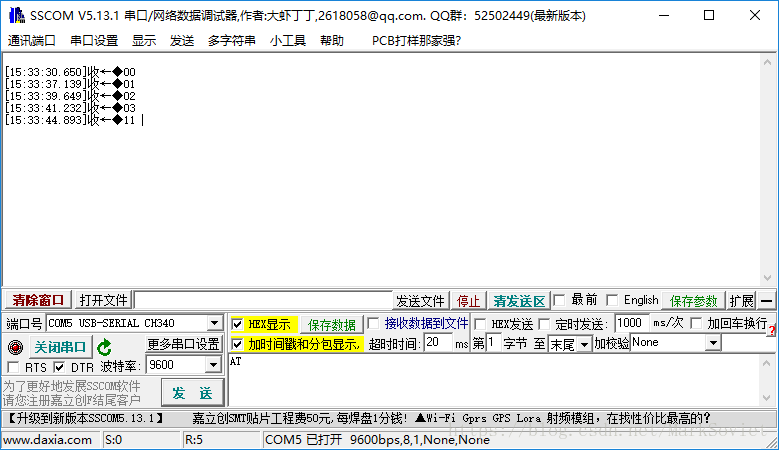
打开蓝牙串口APP,会自动连接,连接以后指示灯就从闪烁变成常亮了。在串口助手里把HEX显示给勾上,然后用APP发几条指令,会发现收到这样:
那就说明蓝牙这边不会出问题了,专心调试STM32吧 - -‘
STM32F407的USART2配置
相信自学STM32的同学入门都是看原子哥的教程,通俗易懂,还给源码,我也不例外。不过我之前比较熟悉的是F103,是Cortex-M3架构,而F407是M4架构,有些许不同,正是这点不同坑了我很久, 我应该直接抄原子哥的代码的 - -
首先查datasheet表,找USART2对应的是哪个GPIO:
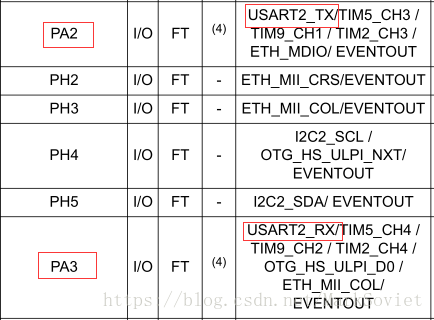
千万不要忘记查看总线! 
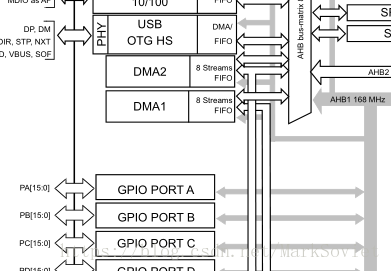
看了系统架构就会知道,F103和407的GPIO挂在不同的总线上。103挂在APB2上,而407挂在AHB1上,所以初始化时钟的时候千万要注意~
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
另外在配置GPIO时的参数也有不同:
我们查看GPIO_InitTypeDef的定义:
//STM32F103中的定义:
typedef struct
{
uint16_t GPIO_Pin;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOMode_TypeDef GPIO_Mode;
}GPIO_InitTypeDef;
//STM32F407中的定义:
typedef struct
{
uint32_t GPIO_Pin;
GPIOMode_TypeDef GPIO_Mode;
GPIOSpeed_TypeDef GPIO_Speed;
GPIOOType_TypeDef GPIO_OType;
GPIOPuPd_TypeDef GPIO_PuPd;
}GPIO_InitTypeDef;
可以看到F407多出了两个参数,即GPIO_OType和GPIO_PuPd。
在F103需要分别设置两个引脚的Mode为复用推挽输出(GPIO_Mode_AF_PP)和浮空输入(GPIO_Mode_IN_FLOATING);但是在F407,两个引脚可以一起设置为GPIO_Mode_AF,并且都设置为推挽输出即可(这个我研究了好半天,据说是因为F1和F4的GPIO复用功能不同,F4复用功能不是在配置IO口模式这儿去配置,而是需要单独配置复用模式,然后再映射,总之就是F407配置串口复用的时候不管Rx还是Tx统统设置为复用推挽输出就好了。)
剩下的USART2初始化、中断初始化等都和F1一样。
最后详细代码如下:
bluetooth.h:
#ifndef __USART2_H
#define __USART2_H
#include "stdio.h"
#include "stm32f4xx_conf.h"
#include "sys.h"
#define USART2_REC_LEN 200
#define EN_USART2_RX 1
extern u8 USART2_RX_BUF[USART2_REC_LEN];
extern u16 USART2_RX_STA;
void bluetooth_init(u32 bound);
#endif
bluetooth.c:
#include "sys.h"
#include "bluetooth.h"
//这个是一个舵机控制板的驱动,感兴趣的可以看我下一篇博客
#include "pcf8574.h"
#if SYSTEM_SUPPORT_OS
#include "includes.h"
#endif
#if EN_USART2_RX
u8 USART2_RX_BUF[USART2_REC_LEN];
u16 USART2_RX_STA=0;
void bluetooth_init(u32 bound){
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource2,GPIO_AF_USART2);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource3,GPIO_AF_USART2);
//GPIOA2,3->USART2RxTx
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//USART2 init
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2, &USART_InitStructure);
USART_Cmd(USART2, ENABLE);
//USART2_ClearFlag(USART2, USART2_FLAG_TC);
#if EN_USART2_RX
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//interrupt
//USART2 NVIC
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//USART2 interrupt channel
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IQR enable
NVIC_Init(&NVIC_InitStructure);
#endif
}
void USART2_IRQHandler(void)
{
u8 Res;
#if SYSTEM_SUPPORT_OS
OSIntEnter();
#endif
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
Res =USART_ReceiveData(USART2);//(USART2->DR)
// USART_SendData(USART2,Res);
if(Res == 0x00)
down();
if(Res == 0x01)
up();
}
#if SYSTEM_SUPPORT_OS
OSIntExit();
#endif
}
#endif
上一篇:STM32F4之USART【库函数操作】
下一篇:STM32F4 开发笔记4: UART的使用方法
推荐阅读最新更新时间:2024-03-16 16:10

 DMF407电机控制专题教程_V1.1
DMF407电机控制专题教程_V1.1 OSEK NM网络管理开发示例
OSEK NM网络管理开发示例 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- 【颁奖礼】摸黑抢楼赢大礼!
- 看是德科技资料填调查问卷赢好礼
- 观展有礼 | 到 e 络盟展台,领星巴克咖啡券(上海慕尼黑电子展)
- 了解ADI电网管理、能源计量方案,答题赢Kindle、《新概念模拟电路》【世健的ADI之路主题游 能源站】
- 送个“车”,抽Keysight牌汽车碎片兑好礼
- 如何在FPGA设计环境中加时序约束
- TE户外照明互连解决方案样片来袭 免费申领进行中!
- 3小时实战+剖析:TI工程师手把手带你全面入门MSP430(限量售$4.3开发套件,助你参与动手实验)
- ST传感器闯天下之驱动移植大赛+骨振动传感器评测,分高者胜
- Keysight示波器主题月有奖系列活动之 注册大奖天天抽 抢楼踩中亦有奖




 京公网安备 11010802033920号
京公网安备 11010802033920号