USB的应用中HID类是比较常见的方式。通过修改STM32 USB固件库V4.0的JOYSTICK应用,我们实现一个双向USB通信。
一、移植
使用STM32源程序为点亮LED灯程序。
首先将USB固件库中有用的函数复制到源函数中,建立LIB文件夹其中放入USB2.0协议函数
建立CFG文件夹放入USB应用函数
将两个文件夹都放到源工程目录下将文件添加进来,设置好,配置好KEIL软件设置。
二、修改文件
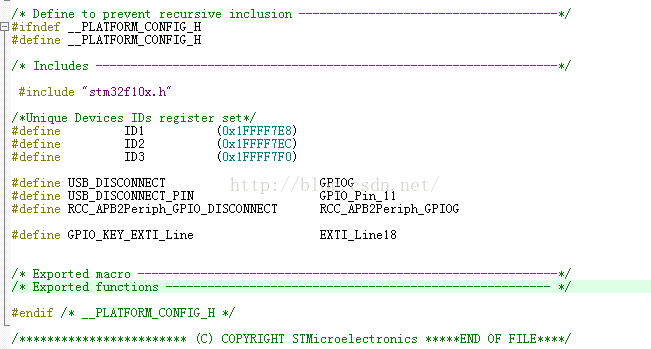
1、首先修改platform_config.h函数。
该文件是对于多种芯片对于USB库的支持。我们使用STM32F103ZET6芯片,所以只保留与之相关的ID项,与USB_DISCONNECT线(PG11)的配置。修改之后的头文件如下所示
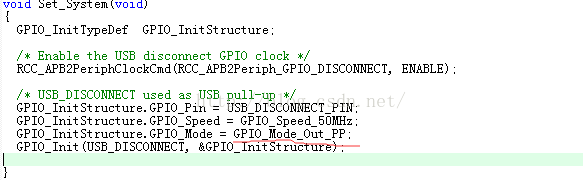
2、然后修改hw_config.c中Set_System函数
实际上STM32F103zet6不需要对USB端口进行单独的配置,删掉Set_System函数中没用的部分,只对USB_DISCONNECT线(PG11)进行初始化。修改后的函数如下图所示。
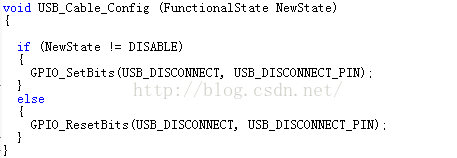
3、接下来修改hw_config.c文件中USB_Cable_Config函数因为我使用的是比较老的神舟III开发板,当PG11为高电平时实现上拉,所以修改后的函数为
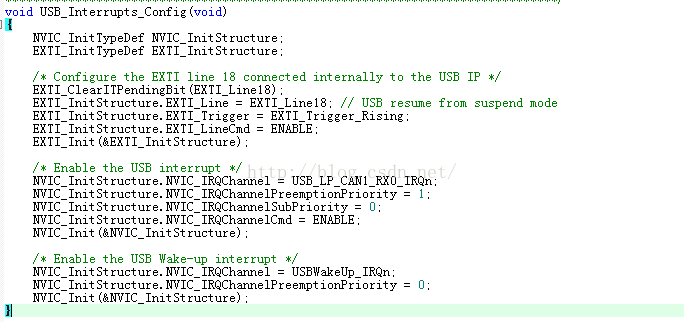
4、修改USB_Interrupt_Config函数,配置USB_LP_CAN1_RX0_IRQn和USBWakeUp_IRQn中断修改后的函数如下图所示。
5、接下来删掉hw_config.c文件中GPIO_AINConfig函数,没有什么用,只会报错
6、删掉与按键相关的设置,因为我们并没有用到,主要是先清除JoyState和Joystick_Send函数中内容,不用管。
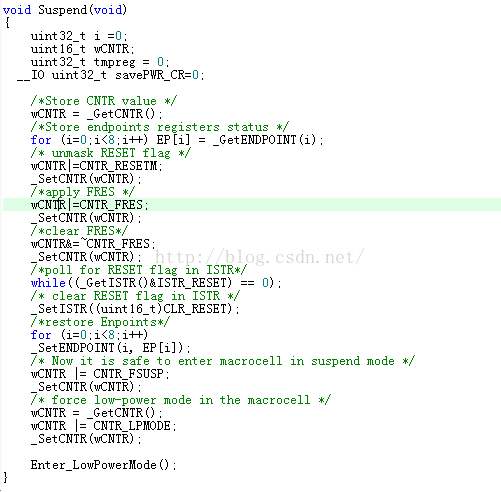
7、最后我们处理USB挂起相关的问题。在USB固件库中提供挂起相关的处理函数,主要有2个函数需要修改。它们是Suspend函数和Enter_LowPowerMode函数。其中,在Suspend函数中注释掉PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);语句。修改Suspend函数,如下图所示
OK接下来应该就没有什么需要修改的地方了(如果有的话请酌情修改)
三、描述符修改
使用USB HID类进行通信调试。所以要对USB的描述符要做部分修改(usb_desc.c)。下面我们贴程序说明(只对重要修改做说明)
设备描述符
修改idVendor和idProduct的值,为任意其他值,我里我用给的是0x0413和0x5724,修改的时候注意大小端
配置描述符集合
const uint8_t Joystick_ConfigDescriptor[JOYSTICK_SIZ_CONFIG_DESC] =
{
0x09, /* bLength: Configuration Descriptor size */
USB_CONFIGURATION_DESCRIPTOR_TYPE, /* bDescriptorType: Configuration */
JOYSTICK_SIZ_CONFIG_DESC,
/* wTotalLength: Bytes returned */
0x00,
0x01, /*bNumInterfaces: 1 interface*/
0x01, /*bConfigurationValue: Configuration value*/
0x00, /*iConfiguration: Index of string descriptor describing
the configuration*/
0xE0, /*bmAttributes: Self powered */
0x32, /*MaxPower 100 mA: this current is used for detecting Vbus*/
/************** Descriptor of Joystick Mouse interface ****************/
/* 09 */
0x09, /*bLength: Interface Descriptor size*/
USB_INTERFACE_DESCRIPTOR_TYPE,/*bDescriptorType: Interface descriptor type*/
0x00, /*bInterfaceNumber: Number of Interface*/
0x00, /*bAlternateSetting: Alternate setting*/
0x02, /*bNumEndpoints除端点0外,需要1输入1输出*/
0x03, /*bInterfaceClass: HID*/
0x00, /*bInterfaceSubClass : 1=BOOT, 0=no boot选择no boot*/
0x00, /*nInterfaceProtocol : 0=none, 1=keyboard, 2=mouse选择none*/
0, /*iInterface: Index of string descriptor*/
/******************** Descriptor of Joystick Mouse HID ********************/
/* 18 */
0x09, /*bLength: HID Descriptor size*/
HID_DESCRIPTOR_TYPE, /*bDescriptorType: HID*/
0x00, /*bcdHID: HID Class Spec release number*/
0x01,
0x00, /*bCountryCode: Hardware target country*/
0x01, /*bNumDescriptors: Number of HID class descriptors to follow*/
0x22, /*bDescriptorType*/
JOYSTICK_SIZ_REPORT_DESC,/*wItemLength: Total length of Report descriptor*/
0x00,
/******************** Descriptor of Joystick Mouse endpoint ********************/
/* 27 */
0x07, /*bLength: Endpoint Descriptor size*/
USB_ENDPOINT_DESCRIPTOR_TYPE, /*bDescriptorType:*/
0x81, /*bEndpointAddress: Endpoint Address (IN)*/
0x03, /*bmAttributes: Interrupt endpoint*/
0x40, /*wMaxPacketSize: 64 Byte max修改最大包大小为64字节 */
0x00,
0x0A, /*bInterval: Polling Interval (10 ms)修改轮询间隔为10ms*/
/******************** Descriptor of Joystick Mouse endpoint ********************/
/* 34 */
0x07, /*bLength: Endpoint Descriptor size*/
USB_ENDPOINT_DESCRIPTOR_TYPE, /*bDescriptorType:*/
0x01, /*bEndpointAddress: Endpoint Address (OUT)*/
0x03, /*bmAttributes: Interrupt endpoint*/
0x40, /*wMaxPacketSize: 64 Byte max修改最大包大小为64字节 */
0x00,
0x20, /*bInterval: Polling Interval (10 ms) 修改轮询间隔为10ms */
/*41 */
} ;
报告描述符
const uint8_t Joystick_ReportDescriptor[JOYSTICK_SIZ_REPORT_DESC] =
{
0x05, 0xFF, /*Usage Page(User Define)*/
0x09, 0xFF, /*Usage(User Define)*/
0xA1, 0x01, /*Collection(application)*/
0x05, 0x01, /*Usage Page(1)*/
0x19, 0x00, /*Usage Minimum(0)*/
0x29, 0xFF, /*Usage Maximum(255)*/
0x15, 0x00, /*Logical Minimum(0)*/
0x25, 0xFF, /*Logical Maximum(255)*/
0x95, 0x40, /*Report Count(3)*/
0x75, 0x08, /*Report Size(1)*/
0x81, 0x02, /*Input(Data,Var,Abs)*/
0x05, 0x02 /*Usage Page(2)*/
0x19, 0x00, /*Usage Minimum(0)*/
0x29, 0xFF, /*Usage Maximum(255)*/
0x15, 0x00, /*Logical Minimum(0)*/
0x25, 0xFF, /*Logical Maximum(255)*/
0x95, 0x40, /*Report Count(64)*/
0x75, 0x08, /*Report Size(8)*/
0x91, 0x02, /*Input(Data,Var,Abs)*/
0xc0 /*关集合*/
}; /* Joystick_ReportDescriptor */
上面我们修改了数组内容,导致数组大小发生变化,所以根据变化做响应修改,在usb_desc.c中
#define JOYSTICK_SIZ_CONFIG_DESC 41
#define JOYSTICK_SIZ_REPORT_DESC 39
四、修改函数
修改设备RESET函数Joystick_Reset,这个函数是在RESET中断中被调用,用于端口的初始化。因为我们增加了端点1的输出,修改了包大小,所以要做响应的修改。这个函数位于usb_prop.c中,修改后的函数为
void Joystick_Reset(void)
{
/* Set Joystick_DEVICE as not configured */
pInformation->Current_Configuration = 0;
pInformation->Current_Interface = 0;/*the default Interface*/
/* Current Feature initialization */
pInformation->Current_Feature = Joystick_ConfigDescriptor[7];
SetBTABLE(BTABLE_ADDRESS);
/* Initialize Endpoint 0 */
SetEPType(ENDP0, EP_CONTROL);
SetEPTxStatus(ENDP0, EP_TX_STALL);
SetEPRxAddr(ENDP0, ENDP0_RXADDR);
SetEPTxAddr(ENDP0, ENDP0_TXADDR);
Clear_Status_Out(ENDP0);
SetEPRxCount(ENDP0, Device_Property.MaxPacketSize);
SetEPRxValid(ENDP0);
/* Initialize Endpoint 1 */
SetEPType(ENDP1, EP_INTERRUPT);
SetEPTxAddr(ENDP1, ENDP1_TXADDR);
SetEPTxCount(ENDP1, 64);//修改大小为64
SetEPTxStatus(ENDP1, EP_TX_NAK);
/* Initialize Endpoint 1 */
//SetEPType(ENDP1, EP_INTERRUPT);
SetEPTxAddr(ENDP1, ENDP1_RXADDR);
SetEPTxCount(ENDP1, 64); //修改大小为64
SetEPRxStatus(ENDP1, EP_RX_VALID);
/* Set this device to response on default address */
SetDeviceAddress(0);
bDeviceState = ATTACHED;
}
在上面中ENDP1_RXADDR是我们新加的,需要我们在usb_conf.h中添加对于它的定义
/* EP1 */
/* tx buffer base address */
#define ENDP1_TXADDR (0x100)
#define ENDP1_RXADDR (0x140)
最后我们编写对于USB输出数据的处理函数,即
void EP1_OUT_Callback(void)
{
DataLen = USB_SIL_Read(ENDP1,kk);//kk是个64字节的数组
if(kk[0]&&0x01 == 0x01)
LED(LED1,1);
else
LED(LED1,0);
if(kk[0]&&0x02 == 0x02)
LED(LED2,1);
else
LED(LED2,0);
if(kk[0]&&0x04 == 0x04)
LED(LED3,1);
else
LED(LED3,0);
if(kk[0]&&0x08 == 0x08)
LED(LED4,1);
else
LED(LED4,0);
SetEPRxValid(ENDP1);
}
在主函数中我们添加USB IN的相关操作,因为设置的是interrupt端点,所以每过10ms主机就是问询设备是否有数据要发送,我们只需要在stm32的主函数中填装数据即可。具体的while循环中代码是
if(GetEPTxStatus(ENDP1)==EP_TX_NAK)
{
if(DataLen !=0)
{
USB_SIL_Write(ENDP1,kk,DataLen);
SetEPTxValid(ENDP1);
DataLen=0;
}
}
最后的最后不要忘了在stm32f10x_it.c中添加中断处理
void USB_LP_CAN1_RX0_IRQHandler(void)
{
USB_Istr();
}
void USBWakeUp_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line18);
}
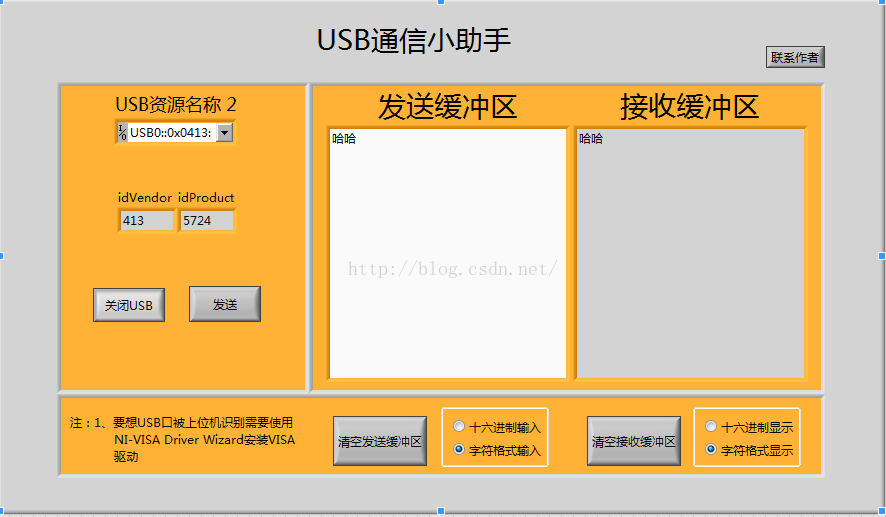
至此整个移植过程就完成了,程序实现的功能是,通过电脑给USB设备发送数据,USB设备收到数据,然后再把数据发送回电脑,为了检验USB的发送与接收,使用Labview编写了一个简单的上位机。大概就是这个样子,发送哈哈,收到哈哈。
上一篇:STM32F10X的USB固件库说明
下一篇:STM32 USB 之从0开始移植笔记
推荐阅读最新更新时间:2024-03-16 16:14

 控制系统设计指南 (埃利斯)
控制系统设计指南 (埃利斯)设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题






 京公网安备 11010802033920号
京公网安备 11010802033920号