XC编译器下中断的写法: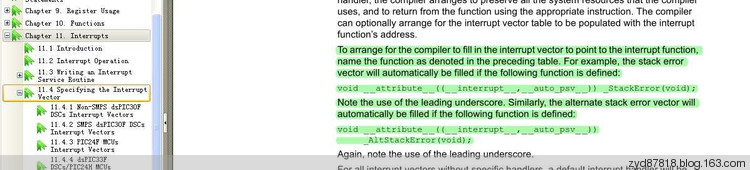
 比如写定时器1中断服务函数就是void __attribute__((__interrupt__,__auto_psv__))_T1Interrupt(void);
比如写定时器1中断服务函数就是void __attribute__((__interrupt__,__auto_psv__))_T1Interrupt(void);
关键字:PIC 中断写法
引用地址:PIC中断写法(MPLAB X集成开发环境,XC编译器 )
根据XC编译器的用户指南:里面是举例了堆栈错的的中断写法。

void __attribute__((__interrupt__,__auto_psv__)) _StackError(void);
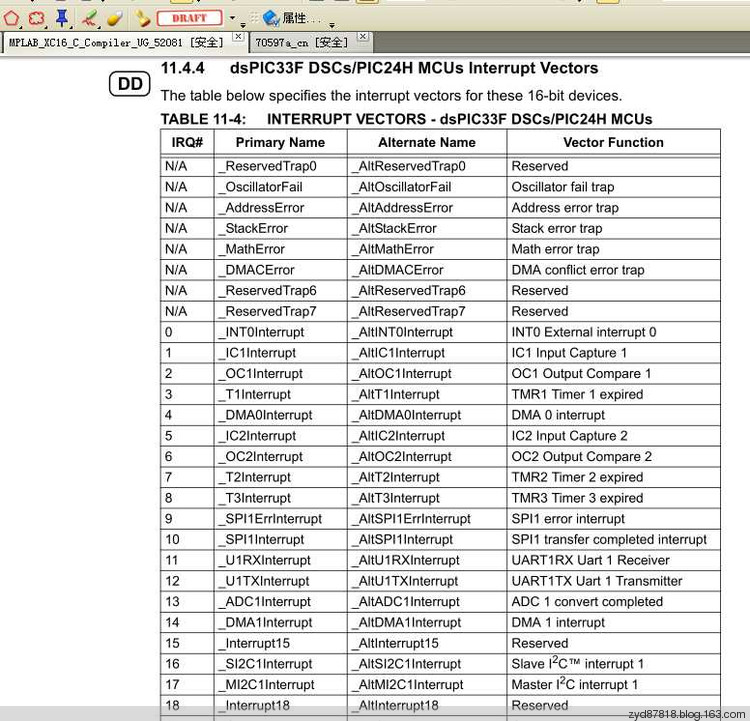
如果我们写自己的终端服务程序,那么将void __attribute__((__interrupt__,__auto_psv__)) 不改动 只修改后面的即可,根据XC编译器的中断向量表来修改:

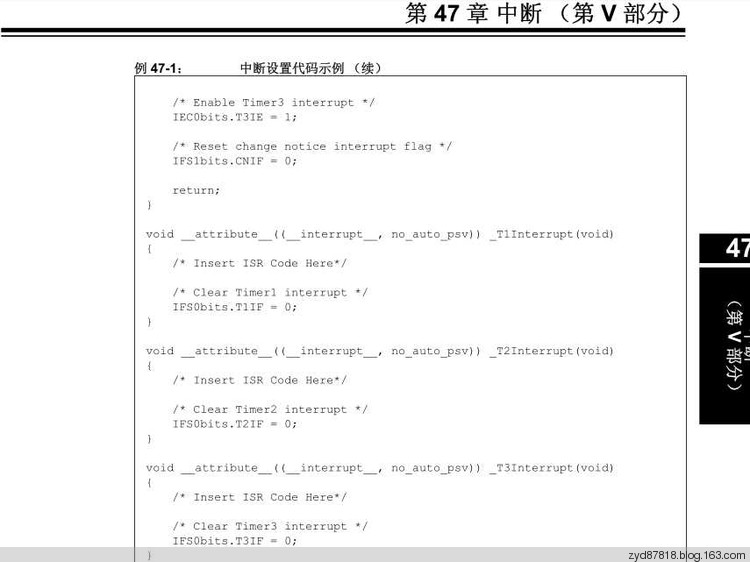
另一个可以参考芯片数据手册中关于中断的讲解,里面一般有例程,如

上一篇:PIC 喂狗,空语句等的写法
下一篇:PIC单片机的 程序存储器,数据存储器,EEPROM区别
推荐阅读最新更新时间:2024-03-16 15:07
可控数字语音延迟器的PIC设计
摘要: 详细阐述一种采用PIC16C55单片机实现可控数字语音延迟器的设计方案,同时提供控制电路图及软件算法流程图。
关键词: 延迟器 语音信号 PIC单片机
延迟器在音频信号处理中有着重要而特殊的用途,是制造混响器、回声信号的重要部件,在无线通信同步控制中也起着重要作用。延迟器大致可分为BBD(Bucket Brigade Device)式延迟器和数字式延迟器两类。数字式延迟器与BBD式延迟器相比,具有延时时间范围宽,工作频带宽,动态范围大等特点;而可控式延迟器可以灵活产生多种时延,以便应用于不同的场合。本文介绍一种基于PIC系列单片机的可控数字语音延迟器的设计方案。
本系统采用性
[应用]
PIC单片机ADC的编程设计

#include __CONFIG(0X1F71); #define uchar unsigned char #define uint unsigned int const uchar Tab[]= {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; const uchar Tab1[]= {0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};//带小数点的代码 void DisPlay(uchar date1,uchar date2,uchar date3,uchar date4); void DelayMS(uint
[单片机]

如何设置PIC单片机的端口
在学习这个部门的时候,曾经碰到过一些题目.PIC单片机的引脚未几,大多都是复用引脚,例如AD、IO、比较器、外接晶振等等,所以在配置端口的时候,一定要知道每个功能怎样设置才能实现的,在这一小节中,我要讲的是通用IO口的设置题目。 PIC16F616有12个IO口,但是有一个引脚(RA3)只能作为输入引脚用,不能用作输出,另外,A口具有电平变化间断的功能,而C口没有,在设计的时候要留意。 在设置的时候,一般要进行以下几项设置: (1)设置端口是模拟端口仍是数字端口,可以通过寄存器ANSEL来设置。例如你想用AD,就要将相应的引脚设置为模拟输入端口。 (2)假如你选择的是数字端口,接下来就要设置端口的方向,是输入仍是输出(RA
[单片机]
PIC16F87x单片机I/O口
单片机的I/O口(以16f87x为例) 1、默认情况下A口跟E口是模拟信号输入口,若要做数字输入输出口必须设置ADCON1寄存器(地址为9FH)的值为06H或者07H,之所以默认情况下以上端口会处于这些状态,是因为上电复位后ADCON1的值为0,而此种组合下,正好A口跟E口的每一位都做模拟输入口使用。 2、RA4由于在结构上是开漏极,所以使用时必须外接上拉电阻,否则得到不到想的高电平。 Mplab相关知识: 一、项目的建立和保存:在mplab里建立的项目文件名不能用中文(据说5.x版本的可以)且必须为西文半角格式;保存时路径不能太深,以
[单片机]
PIC单片机音乐播放程序
以下程序要用二个定时器资源,凡是有二个定时器的PIC 单片机 均可实现,该范例需要的MCU是MICROChip PIC16C62 INCLUDE D:\PIC\P16XX.EQU ;该文件在MICROCHIP光盘中可找到 ;************************************************** #define BeepOut RC,4 ;************************************************** W_TEMP EQU 0X20 ;(0XA0) STATUS_TEMP EQU 0X21 BeepCnt equ 30h TmrBak equ 31h
[单片机]
你不知道的PIC单片机中断程序的设计技巧
所有的中档系列PIC单片机,PORTB端口最高的4个引脚(RB7~RB4)在设为输入模式时,当输入电平由高到低或由低到高发生变化时,可以让单片机产生中断。这就是通常所说的引脚状态变化中断。 在设计引脚中断程序时,有三个需要特别注意的地方。一是,在清除P0RTB中断标志位RBIF之前,必须安排一条必不可少的,以PORTB端口数据寄存器PORTB为源寄存器的读操作指令。放置这一指令的目的有时并不只是为了读取有用的数据,而是为了取消状态变化的硬件信号,以便顺利清除RBIF标志位,为下一次中断做好准备。二是,由于端口PORTB是引脚电子变化中断,即无论引脚出现上升沿还是下降沿都会产生中断请求,所以必须处理好不需要的虚假中断。三是,
[单片机]
8位MCU将消失?你想错了
8位微控制器能否再经历一场复兴?
随着ARM处理器架构的兴起和32位微控制器的广泛应用,人们很容易假设,随着32位处理器芯片的价格和功耗的下降,采用8位MCU进行设计已经变得越来越没有竞争力了。
但现实情况并非如此。Microchip、Atmel和意法半导体等芯片供应商比以往任何时候更致力于完善和升级自己的8位微控制器,并正为其添加高性能外设和扩展开发工具。
微芯科技(Microchip)的Lucio Di Jasio提到:“我们不会将8位微控制器做低价化处理,相反,我们正在加大对8位PIC系列单片机的投资,以把它应用在新的更高性能的应用中”。
对于高端电机控制是否真的需要一个32位ARM微控制器或一个基于M
[单片机]
基于nRF24L01和PIC16F877无线数据传输系统设计
引言 在工业控制现场, 常常需要采集大量的现场数据, 如温度、湿度、气压等, 并将这些数据传输到主机进行处理,由主机根据处理的结果, 将控制信号传输给现场执行模块进行各种操作。可以看出数据从采集设备到处理终端,监测控制指令从处理终端到采集设备,均需经过传输过程这一重要环节。当数据采集点处于运动状态,或者所处的环境不允许铺设电缆,采集设备必须与终端设备分离,此时只能通过无线方式进行数据传输。基于此,本文设计了一个无线数据传输系统,它应用Microchip公司的PIC16F877单片机控制Nordic公司的无线数字传输芯片nRF24L01 ,通过无线方式进行数据双向传输。实验结果证明:该系统使用灵活、成本低廉,可方便地嵌入到无
[工业控制]
 嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版
嵌入式C语言自我修养——从芯片、编译器到操作系统 带目录 文字版 电池管理系统DIY设计(原理图+PCB+BOM+部分源码)
电池管理系统DIY设计(原理图+PCB+BOM+部分源码) 电池管理系统DIY设计(原理图+PCB+BOM+部分源码)
电池管理系统DIY设计(原理图+PCB+BOM+部分源码) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月24日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号