proteus中的步进电机有两种,
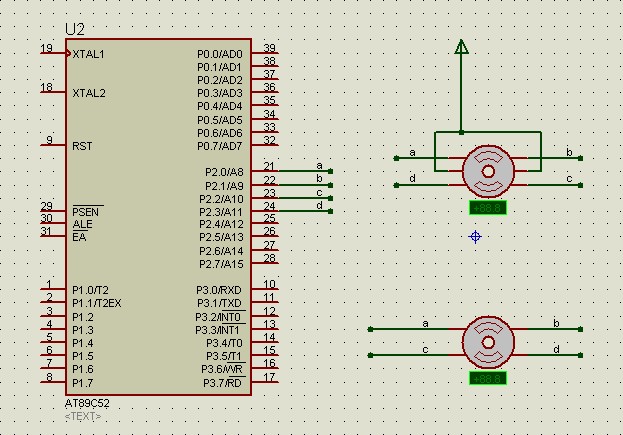
六线制(MOTOR-STEPPER)和四线制(MOTOR-BISTEPPER),六线制的左右中间两根线接电源,任然剩下四根,但是,这四根的顺序和四线制的不同,见下图。
注意a,b,c,d的顺序
在实际情况中,单片机是不能直接拖动步进电机的,需用ULN2003这样的器件
两个步进电机都是四相电机。
如果用四拍:
那么P2输出的(顺时针)顺序就是:0x03,0x06,0x0c,0x09
a 1 0 0 1
b 1 1 0 0
c 0 1 1 0
d 0 0 1 1
如果用八拍:
那么P2输出的(顺时针)顺序就是:0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09
a 1 1 0 0 0 0 0 1
b 0 1 1 1 0 0 0 0
c 0 0 0 1 1 1 0 0
d 0 0 0 0 0 1 1 1
给一个测试八拍的仿真程序:
#include
main(){
while(1){
unsigned int i,j,k;
for(k=0;k<255;k++){
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x01;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x03;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x02;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x06;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x04;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x0c;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x08;
for(i=0;i<75;i++)
for(j=0;j<255;j++);
P2=0x09;
}
}
}
关键字:proteus 步进电机 接法与时序
引用地址:
51proteus仿真:proteus中的步进电机的接法与时序
推荐阅读最新更新时间:2024-03-16 15:30
基于PIC单片机步进电机自适应控制技术的应用研究
摘要 :步进电机作为一个驱动执行单元,广泛地使用于工业领域和民用领域。本文对将自适应控制技术应用于步进电机的驱动控制进行了讨论和研究,构建了以PIC16F877单片机为核心的微机控制系统,并对步进电机控制的不同的技术方案进行了分析、比较和讨论。 关键词 :步进电机;PIC单片机;自适应控制技术;位置控制 中图分类号:TD679;TP273;TP368.1 文献标识码:A Application Study of Adaptive Control of Stepping Motor Based on PIC MCU HU Jun-da HU Hui HUANG Wang-jun (Hunan Institute of Engine
[单片机]

用MSP430F149单片机实现步进电机通用控制器
1.前言 基于步进电机的控制系统,除了步进电机一般还需要专门的驱动电源,驱动电源仅仅完成功率驱动部分,用户并不能使整个控制系统按预定的、期望的工作状态运行,必须对它的驱动电源予以控制,用户需要再次开发。 鉴于此,设计了基于MSP430F149单片机实现的步进电机通用控制器,可以满足大多数控制场合下的要求。控制器的主要功能为: ① 可控制多套步进电机驱动系统;目前可同时控制3套系统。 ② 工作方式灵活,可按设定的曲线运行,曲线最多达8段;可按外部检测到的控制信号运行;可按模拟调节测试功能运行; 2.系统的设计 2.1系统的结构 本控制器主要实现了多台步进电机在多段曲线上的运行控制。系统结构如图1所示。
[单片机]
基于XC2267M的仪表盘步进电机控制
随着现代电子技术的发展,中高档汽车上的组合数字仪表越来越多地采用“机电一体化”的步进电机。步进电机又称脉冲电动机,它能将输入的脉冲信号变成不连续的机械动作,是一种将电脉冲转化为角位移的执行机构。对步进电机的每一相来讲,输入的是一个脉冲列,只要控制好电脉冲,就能精确控制步进电机的角位移量,转速和转矩。从这个意义上来说,步进电机控制的核心是PWM(脉冲宽度调制)细分控制技术。 用单片机来控制步进电机已有近15年的发展历史。出于降低总体成本的考虑,长期以来所采用的芯片都是8位单片机。由于单片机自身性能的局限性,对于步进电机的控制常常采用不彻底的细分控制或带外设的细分控制。不彻底的细分控制一般是将步进电动机的控制位置数(以两相步进电机为
[工业控制]
一种带有限位功能的步进电机控制器
步进电机是一种将电脉冲转换为角位移或直线运动的执行设备。在非超载的情况下,电机转速和停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,因此步进电机广泛应用于精密控制场合 。 在基于图像处理评价函数的调焦系统中,常用的调焦策略包括斐波那契搜索法和爬山搜索法,其中又以爬山搜索法应用最为广泛 。根据爬山搜索的原理,在开始搜索时,先复位调焦镜头到起始搜索位置,在搜索焦点的过程中,要防止由于图像噪声等干扰造成程序判断错误,导致调焦镜头越出调焦范围边界。 为了适应这种控制需求,对通用步进电机控制器进行了改进,使其在具有自动和手动控制功能的同时,引入限位信号反馈控制。电机控制器使用硬件描述语言(HDL)编写,而限位信号则由位
[工业控制]
实用的 28BYJ-48 步进电机控制程序
上面我们虽然完成了用中断控制电机转动的程序,但实际上这个程序还是没多少实用价值的,我们不能每次想让它转动的时候都上下电啊,是吧。还有就是它不但能正转还得能反转啊,也就是说不但能转过去,还得能转回来呀。好吧,我们就来做一个实例程序吧,结合第8章的按键程序,我们设计这样一个功能程序:按数字键1~9,控制电机转过1~9圈;配合上下键改变转动方向,按向上键后正向转1~9圈,向下键则反向转1~9圈;左键固定正转90度,右键固定反转90;Esc 键终止转动。通过这个程序,我们也可以进一步体会到如何用按键来控制程序完成复杂的功能,以及控制和执行模块之间如何协调工作,而你的编程水平也可以在这样的实践练习中得到锻炼和提升。 #include reg
[单片机]
STM32 TIM1 CH1 出波动态改变PWM频率 控制步进电机的方法
void TIM1_PWM_Init(u16 arr,u16 psc) { GPIO_InitTypeDef GPIO_InitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
[单片机]
AT24C1024 proteus 2-wire Serial EEPROM 1
第i地址写入i 注意,读数据时候 if((TWSR & 0xF8) != 0x10)//0x10 重复START 已发。。。不是0x08.还有2次读写之间稍微延时一会。否则不出结果 avr的数据手册写得很好,好多程序源码都有,怪不得这么流行 1 #include iom16v.h #include 1602.c #define uint unsigned int #define uchar unsigned char #define START TWCR=(1 TWINT)|(1 TWSTA)|(1 TWEN) #define STOP TWCR=(1 TWINT)|(1 TWSTO)|(1 TWEN)
[单片机]
精密控制系统中步进电机的电细分技术研究
摘要:采用具有电细分的步时电机驱动技术可实现精密控制系统中高精度的位移。基于单片机的直流电压控制的电细分驱动技术,避免了绕组互感带来的误差,提高了细分精度。实验表明,当采用精密丝杆机构、螺距为1mm、步进电机步距离为1.8%26;#176;、实现128细分时,可调整组件每步位置移动为0.04μm,最大误差为15%,均方误差为3.9%。
关键词:步进电机 直流电压控制 细分
在许多精密控制系统中需要有较高的位移精度。为实现高精度的位移与调整,常采用具有电细分的步进电机驱动技术。步进电机具有控制简单、无积累误差等优点。通常步进电机的电细分驱动有斩波恒流驱动与脉冲宽度调制驱动等方法。而采用单片机直流电压控制的电细分驱动方式,则具有线
[传感技术]


 步进电机驱动控制技术及其应用设计研究
步进电机驱动控制技术及其应用设计研究 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南












 京公网安备 11010802033920号
京公网安备 11010802033920号