1. 配置内核
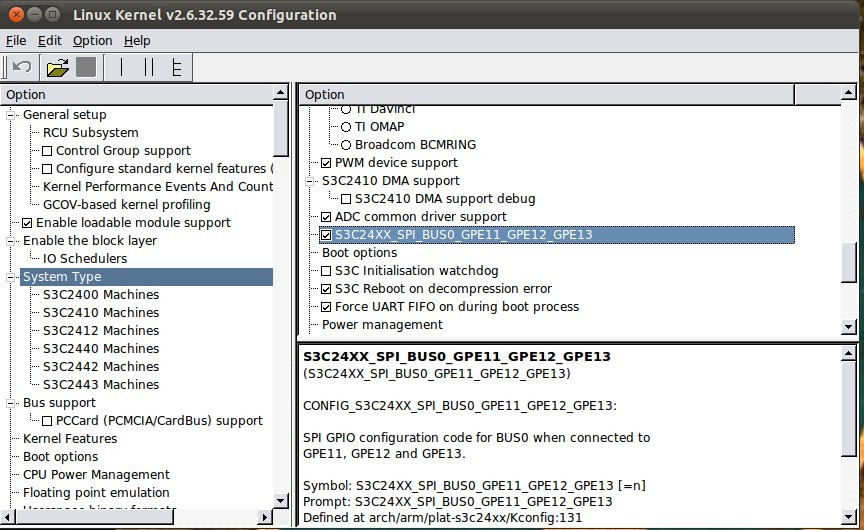
首先,修改arch/arm/plat-s3c24xx/Kconfig,这一步的目的是为了可以在内核中使能SPI0的配置函数。
修改后的内容如下:
config S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13
bool " S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13"
help
SPI GPIO configuration code for BUS0 when connected to
GPE11, GPE12 and GPE13.
接着配置内核,首先打开S3C24XX_SPI_BUS0_GPE11_GPE12_GPE13选项,这样编译的时候会将
arch/arm/plat-s3c24xx/spi-bus0-gpe11_12_13.c一起进行编译。
该源文件中的函数void s3c24xx_spi_gpiocfg_bus0_gpe11_12_13(struct s3c2410_spi_info *spi, int enable)将用于配置spi控制器0的管脚。
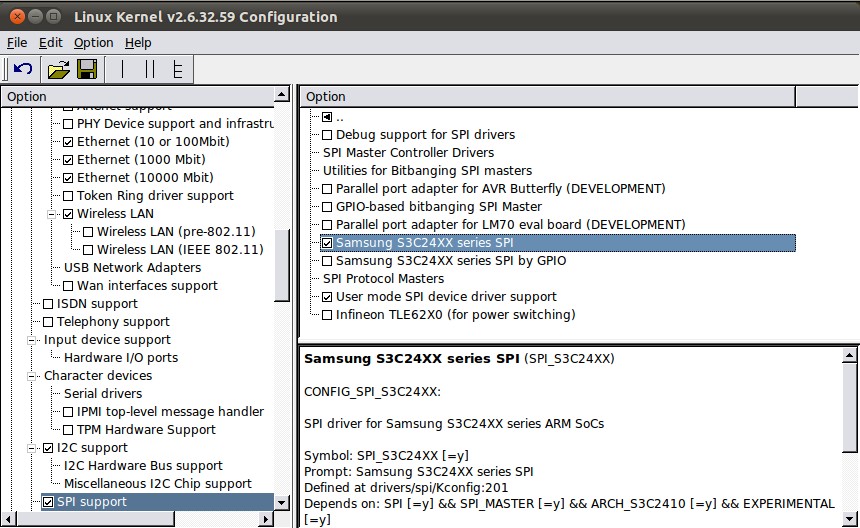
接着,使能SPI功能,这里打开2440的SPI控制器驱动和通用的protocol驱动spidev。
2. 修改源码
修改arch/arm/mach-s3c2440/mach-smdk2440.c
增加内容:
#include
#include
static struct s3c2410_spi_info s3c2410_spi0_platdata={
.pin_cs = S3C2410_GPG(2),
.num_cs = 1,
.bus_num = 0,
.gpio_setup = s3c24xx_spi_gpiocfg_bus0_gpe11_12_13,
};
static struct spi_board_info s3c2410_spi0_board[]={
[0] = {
.modalias = “spidev”,
.bus_num = 0,
.chip_select = 0,
.max_speed_hz = 500 * 1000,
},
};
在smdk2440_devices[]中增加
&s3c_device_spi0,
在smdk2440_mach_init函数中增加
s3c_device_spi0.dev.platform_data = &s3c2410_spi0_platdata;
spi_register_board_info(s3c2410_spi0_board,ARRAY_SIZE(s3c2410_spi0_board));
修改完毕以后,重新编译内核,并下载内核。查看下设备节点:
[root@yj423 /dev]#ls /dev/spidev0.0
/dev/spidev0.0
3.测试
用杜邦线将MOSI和MISO管脚相连。
在内核源码中提供了SPI测试程序。源码位于Documentation/spi/spidev_test.c,编译之后,下到开发板并执行。
[root@yj423 yj423]#./spidev_test -D /dev/spidev0.0
spi mode: 0
bits per word: 8
max speed: 500000 Hz (500 KHz)
FF FF FF FF FF FF
40 00 00 00 00 95
FF FF FF FF FF FF
FF FF FF FF FF FF
FF FF FF FF FF FF
DE AD BE EF BA AD
F0 0D
NOTE:如果你只是为了移植而移植,那么后面的内容就不要看了。想知道WHY,那请继续往下看。
4.原理
首先,在第二小结中我们看到定义了两个数据结构,之所以要定义那是因为驱动程序需要用到,详见
基于S3C2440的嵌入式Linux驱动——SPI子系统解读(二)
需要这两个数据结构的地方,均用红色字体说明了。
数据s3c2410_spi0_platdata是作为平台的私有数据,因此使用了s3c_device_spi0.dev.platform_data = &s3c2410_spi0_platdata来添加该数据。
而s3c2410_spi0_board必须通过函数spi_register_board_info添加到内核中,
最重要的一个问题,这些数据结构的值是怎么给出的?
先来看看这两个数据结构:
struct spi_board_info {
/* the device name and module name are coupled, like platform_bus;
* "modalias" is normally the driver name.
*
* platform_data goes to spi_device.dev.platform_data,
* controller_data goes to spi_device.controller_data,
* irq is copied too
*/
char modalias[32];
const void *platform_data;
void *controller_data;
int irq;
/* slower signaling on noisy or low voltage boards */
u32 max_speed_hz;
/* bus_num is board specific and matches the bus_num of some
* spi_master that will probably be registered later.
*
* chip_select reflects how this chip is wired to that master;
* it's less than num_chipselect.
*/
u16 bus_num;
u16 chip_select;
/* mode becomes spi_device.mode, and is essential for chips
* where the default of SPI_CS_HIGH = 0 is wrong.
*/
u8 mode;
/* ... may need additional spi_device chip config data here.
* avoid stuff protocol drivers can set; but include stuff
* needed to behave without being bound to a driver:
* - quirks like clock rate mattering when not selected
*/
};
struct s3c2410_spi_info {
int pin_cs; /* simple gpio cs */
unsigned int num_cs; /* total chipselects */
int bus_num; /* bus number to use. */
void (*gpio_setup)(struct s3c2410_spi_info *spi, int enable);
void (*set_cs)(struct s3c2410_spi_info *spi, int cs, int pol);
};
4.1 s3c2410_spi_info
pin_cs:表示哪个管脚用输出片选信号,这里使用GPG2管脚,具体的管脚请参看你的datasheet。
bus_num:表示总线接口。这里使用0,表示使用SPI0控制器。S3C2440有两个SPI控制器,分别为SPI0和SPI1。
num_cs:表示该SPI控制器控制几个SPI从设备,这里为1,仅有一个设备。
s3c2410_spi_info作为平台数据,在s3c24xx_spi_probe函数中,bus_cs和bus_num将被复制给master中的相应字段。也就是说,该master为SPI0控制器,有1个从设备。
而pin_cs将由函数s3c24xx_spi_gpiocs使用,该函数使能片选信号。
static void s3c24xx_spi_gpiocs(struct s3c2410_spi_info *spi, int cs, int pol)
{
gpio_set_value(spi->pin_cs, pol);
}
gpio_setup: 这里设置为函数s3c24xx_spi_gpiocfg_bus0_gpe11_12_13, 该函数用于初始化SPI控制器的管脚。
该函数将在主控制驱动的s3c24xx_spi_initialsetup函数中被调用:
4.2 spi_board_info
首先,我们知道spi_board_info作为SPI设备的板级信息,在spi_new_device函数中将该板级信息全部复制给spi_device。
modalias:将用于绑定驱动和设备。我们看下match方法:
static int spi_match_device(struct device *dev, struct device_driver *drv)
{
const struct spi_device *spi = to_spi_device(dev);
return strcmp(spi->modalias, drv->name) == 0;
}
而drv->name为在spi_driver中定义,如下
static struct spi_driver spidev_spi = {
.driver = {
.name = "spidev",
.owner = THIS_MODULE,
},
.probe = spidev_probe,
.remove = __devexit_p(spidev_remove),
/* NOTE: suspend/resume methods are not necessary here.
* We don't do anything except pass the requests to/from
* the underlying controller. The refrigerator handles
* most issues; the controller driver handles the rest.
*/
};
可见,drv->name为spidev,因此spi-device的modalias字段也必须为spidev,而该字段是由板级信息的spi_board_info的modaias复制得来。这就是为什么modalias必须为spidev。
bus_num:用来匹配主控制器和属于该主控制器的SPI设备。
static void scan_boardinfo(struct spi_master *master)
{
struct boardinfo *bi;
mutex_lock(&board_lock);
/*以board_list为链表头,遍历所有的boardinfo结构,链表由spi_register_board_info添加*/
list_for_each_entry(bi, &board_list, list) {
struct spi_board_info *chip = bi->board_info;
unsigned n;
/*遍历该boardinfo指向的spi_board_info数组*/
for (n = bi->n_board_info; n > 0; n--, chip++) {
if (chip->bus_num != master->bus_num) /*通过bus_num对spi设备和master进行匹配*/
continue;
/* NOTE: this relies on spi_new_device to
* issue diagnostics when given bogus inputs
*/
/*执行到此,表示匹配完成,SPI设备由该SPI接口来控制,开始创建spi_device*/
(void) spi_new_device(master, chip);
}
}
mutex_unlock(&board_lock);
}
可见,master的bus_num和spi_board_info的bus_num必须相同,从上面我们又知道master的bus_num是由s3c2410_spi_info的bus_num复制而来,因此spi_board_info的bus_num的值必须和s3c2410_spi_info的bus_num相等。
chip_selest:该值表示这是该SPI接口上的第几个设备,这里是0,其实就是第一个设备。该值用于区分不同的设备。注意,该值必须小于s3c2410_spi_info的num_cs字段。
max_speed_hz:表示传输速率,这里设置的速度为500kHz。
其余的字段可以不设置。
5. 结束语
本文给出了SPI驱动移植的步骤,并使用测试程序测试了该SPI驱动。最后,对移植的原理进行了讲解。
上一篇:基于S3C2440的嵌入式Linux驱动——SPI子系统解读(一)
下一篇:S3C2440 Linux驱动移植——LCD
推荐阅读最新更新时间:2024-03-16 15:38

 控制系统设计指南 (埃利斯)
控制系统设计指南 (埃利斯) 【得捷Follow me第4期】+小白手把手带你学习rp2040+w5500(所有任务)
【得捷Follow me第4期】+小白手把手带你学习rp2040+w5500(所有任务) 模拟集成电路设计与仿真
模拟集成电路设计与仿真
设计资源 培训 开发板 精华推荐
- 【下载】LAT1416 借助 DMA 将内存图像旋转 90 度
- 【下载】LAT1426 IAR flashloader 下载算法制作介绍
- 【下载】LAT1431 STM32 AI Model Zoo 的安装及实例介绍
- 【下载】LAT1435 使用 GPDMA 进行 SPI LCD 整屏传输
- 【下载】LAT1438 AFCI 上位机用户手册
- 【下载】LAT1440 如何在特定串口工具上以不同颜色显示信息








- 最后一天!Beetle ESP32-C3免费测评,赶紧上车
- ST工业峰会巡演2023 已开启,北京、上海 报名进行中!
- 听技术大咖侃谈Type-C 测量那些事儿—— 即刻获取能量,轻松闯关赢礼品!
- 劳动节归来,EEWORLD社区4月明星人物出台喽!
- 【投票瓜分2500元红包】2022得捷电子创新设计大赛优秀作品人气奖由你来定!
- 直播已结束【使用 TI 低成本 MSPM0 MCU 快速开发 – 生态详解系列之二】(9:45开始入场)
- EEWorld有奖主题征文来了~现金奖励等你来拿!
- TI 嵌入式处理主题直播月|报名观看直播赢好礼【低功耗WiFi MCU、Sitara AM57X平台、机器学习】
- 有奖问答|ADI技术直通车——电化学传感测量与气体检测
- TI带你一起解剖共享单车智能锁!看视频涨知识赢好礼喽!




 京公网安备 11010802033920号
京公网安备 11010802033920号