中断优先级由高到低
51单片机:INT0(P3.2)、TIMER0、INT1(P3.3)、TIMER1、串口中断(P3.0、P3.1)
52单片机:TIMER2
外部中断下降沿触发
内部定时器:TMOD寄存器(M1M0)
M1 M0 方式
0 0 0 13位
0 1 1 16位
1 0 2 8 auto
1 1 3 两个8位
串口{RI->while(RI!)
TI->while(TI!)}
执行指令时中断来了,先执行完这条指令再处理中断.
单片机与外部进行信息交换的方式:轮询方式、中断方式、DMA
2451 53个中断源
程序初始地址:0x30000000
中断向量地址:0x00000000
中断模式:
IRQ:正常触发中断模式
FIQ:快速中断模式(紧急状况使用,优先级高)
寄存器:
SRCPND1 首标识寄存器,32位,对应中断被请求该位置为1,默认值为0
INTMSK 屏蔽寄存器,32位,对应中断被屏蔽该位置为1,默认为1
INTPND 尾标识寄存器,32位,和首标识寄存器内容一样
SUBSRCPND 子标识寄存器,32位,
INTSUBMSK 子屏蔽寄存器,32位,
PRIORITY 优先级寄存器,28位,
INTMOD 模式寄存器,32位,默认都置位0,0代表IRQ模式,1代表FIQ

(没有被屏蔽)->INTMODE(IRQ)->PRIORITY(10、12、28)->INTPND(10位置1)->INTOFFSET(置为10)->TIMR0 中断服务函数(ISR)->INTPND、SRCPND、SUBSRCPN
清第10 位的中断标识位
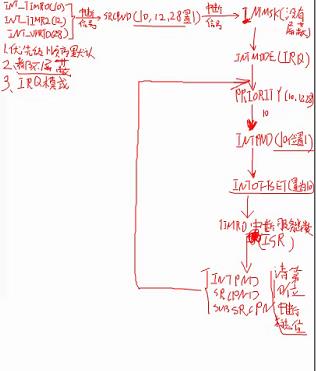
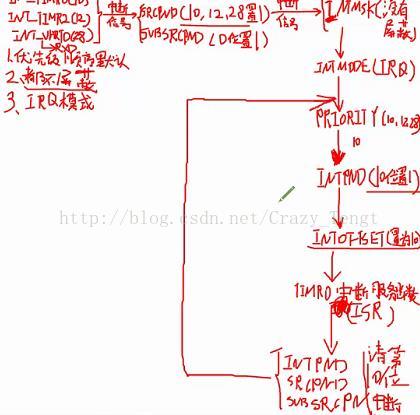
1.优先级顺序默认
2.都不屏蔽
3.IRQ模式
定时器中断:
51单片机:
时钟周期: 1/110592M = 1.09us, 1/12M
机械周期: 12*1.09us,
2个机械周期 = 1个节拍
指令周期 = 若干机械周期(>=1)
T0、 1、 16位 TH0(高8位); 加计数->65535 溢出
2^16 - 1 = 65535
12M 机械周期 1us
65.535ms
定时50ms
TH0 = (65535-50000)/256; //高8位
TL0 = (65535-50000)%256; //低8位
2451:
PWM:占空比 高电平所占时间
寄存器:
TCFG: 预分频寄存器,32位
TCON:定时器控制寄存器,22位
TCNTB: 计数寄存器
TCMPB: 比较寄存器
TCNTO: 观测TCNTB
简单定时器初始化步骤:
1、配置预分频系数(199)
2、配置分频系数(8)
3、配置计数初始值(41250)
4、配置为自动重载功能(TCON)
5、Update初值(TCON)
6、开启定时器(TCON)
7、清除bit(Update初值控制位)(TCON)
关键字:ARM 中断
引用地址:
ARM学习笔记---中断
推荐阅读最新更新时间:2024-03-16 15:45
ARM寄存器的总结
1) 31个通用寄存器,包括程序计数器(PC)。这些寄存器都是32位的; 2)6个状态寄存器。这些寄存器也是32位的,但是只使用了其中的12位。 ARM通用寄存器 通用寄存器(R0-R15)可分为三类:不分组寄存器R0~R7;分组寄存器R8~R14;程序计数器PC。 1)不分组寄存器R0~R7 不分组寄存器R0~R7在所有处理器模式下,它们每一个都访问一样的32位寄存器。它们是真正的通用寄存器,没有体系结构所隐含的特殊用途。 2)分组寄存器R8~R14 分组寄存器R8~R14对应的物理寄存器取决于当前的处理器模式。若要访问特定的物理寄存器而不依赖当前的处理器模式,则要使用规定的名字。 寄存器R8~R
[单片机]
微软宣布下一代Windows支持ARM处理器(图)
微软Windows和Windows Live部门总裁斯蒂芬·斯诺夫斯基(Steven Sinofsky) 微软刚刚在国际电子消费展CES 2011上宣布,下一个版本的Windows将同时支持ARM架构和X86架构低功耗SoC(System on a Chip)处理器。 微软还在CES 2011展示了运行于新Soc平台,包括英特尔X86架构和英伟达、高通和德州仪器等支持的ARM架构上的下一版本Windows。 微软称,英特尔和AMD将继续改进和提升x86架构,包括更加节能的系统、最近刚刚公布的第二代酷睿家族和AMD的Fusion融合APU。而英伟达、高通和德州仪器则将与微软合作,第一次在Windows上支持AR
[手机便携]

ATmega32 中断向量
本节描述ATmega32的中断处理。更一般的AVR中断处理请参见P11“复位与中断处理” 。 (点击图片放大) Notes: 1. 熔丝位BOOTRST被编程时,MCU复位后程序跳转到Boot Loader。请参见 P228 “支 持引导装入程序 – 在写的同时可以读(RWW, Read-While-Write)的自我编程能力 ” 。 2. 当寄存器GICR的IVSEL置位时,中断向量转移到Boot区的起始地址。此时各个中断向 量的实际地址为表中地址与Boot 区起始地址之和。 Table 19给出了不同的BOOTRST/IVSEL设置下的复位和中断向量的位置。如果程序永远不使能中断,中断向量就没有意义。用户可以在此直接写
[单片机]
德州仪器推出采用ARM Cortex-A8 的微处理器单元
日前,德州仪器 (TI) 宣布推出两款采用 1GHz ARM Cortex-A8 的 Sitara 微处理器单元 (MPU) AM3715 与 AM3703,其更快的系统响应时间与启动时间以及更长的电池使用寿命可为开发人员提供极大的便利。这些 MPU 可满足各种应用需求,如便携式数据终端、便携式医疗设备、家庭与楼宇自动化、导航系统、智能显示屏以及人机接口 (HMI) 工业应用等。AM3703 适用于不需要图形功能的应用。AM3715 可提供比前代 Sitara 器件高 2 倍的图形性能,支持流畅复杂的 3D 渲染、完美的视觉效果以及增强型图形用户界面 (GUI) 等功能。AM3715 与 AM3703 均可将 ARM 性能提
[嵌入式]
ARM9嵌入式处理器S3C2440实现了远程图像光线监控系统
对图像监控系统,用户常常提出这样的功能需求:希望能够监控距离较远的对象 这些对象有可能分布在郊区、深山,荒原或者其他无人值守的场合;另外,希望能够获取比较清晰的监控图像,但对图像传输的实时性要求并不高 很明显,用传统的PC机加图像采集卡的方式很难满足这样的需求。 在嵌入式领域,ARM9系列微处理器在高性能和低功耗方面提供了最佳的性能,因此选用ARM9嵌入式处理器S3C2440设计实现了一个远程图像光线监控系统通过这个系统,可以远在千里之外控制一个摄像机进行图像采集并回传。如果这个摄像机有一个485接口的云台,还可以通过互联网远程控制摄像机的取景角度、镜头拉伸、聚焦等功能 除了获取图像数据.系统还提供了多路开关控制和数据
[单片机]
认识ARM体系结构的发展
处理器的体系结构定义了指令集(ISA)和基于这一体系结构下处理器的程序员模型。尽管每个处理器性能不同,所面向的应用不同,每个处理器的实现都要遵循这一体系结构。arm体系结构为嵌入系统发展商提供很高的系统性能,同时保持优异的功耗和面积效率。 arm体系结构的发展 ARM体系结构为满足ARM合作者以及设计领域的一般需求正稳步发展。每一次arm体系结构的重大修改,都会添加极为关键的技术。在体系结构作重大修改的期间,会添加新的性能作为体系结构的变体。下面的名字表明了系统结构上的提升,后面附加的关键字表明了体系结构的变体。 V3结构 32位地址。 Thumb状态:16位指令。 长乘法支持(32*32= 64或者32*32+64=
[单片机]
常用ARM指令集及汇编
一、ARM处理器的寻址方式 二、指令集学习 (一) ARM指令集 1. 指令格式 2. 条件码 3. ARM存储器访问指令 1) LDR/ STR-加载/ 存储指令 2) LDM/ STM-多寄存器加载/ 存储指令 3) SWP-寄存器和存储器交换指令 4. ARM数据处理指令 1) 数据传送指令 a) MOV-数据传送指令 b) MVN-数据非传送指令 2) 算术逻辑运算指令 a) ADD-加法运算指令 b) SUB-减法运算指令 c) RSB-逆向减法指令 d) ADC-带进位加法指令 e) SBC-带进位减法指令 f) RSC-带进位逆向减法指令 g) AND-逻辑 与 h) ORR-逻
[单片机]
c51单片机定时中断的精确定时编程方法大全
引 言 MCS-51单片机的中断响应延迟时间,取决于其它中断服务程序是否在进行,或取决于正在执行的是什么样的指 令。单中断系统中的中断响应时间为3~8个机器周期 。无论是哪一种原因引起的误差,在精确定时的应用场合, 必须考虑它们的影响,以确保精确的定时控制。根据定时中断的不同应用情况,应选择不同的精确定时编程方法。 文中以定时器T1工作在定时方式1为例,晶振频率为12MHz 。 1 方法1 在定时器溢出中断得到响应时,停止定时器计数,读出计数值(反映了中断响应的延迟时间),根据此计数值算 出到下一次中断时,需多长时间,由此来重装载和启动定时器。例如定时周期为1ms,则通常定时器重装载值为- 1000(0FC18H)。下
[单片机]




 ARM Cortex-M0权威指南(中文)
ARM Cortex-M0权威指南(中文) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用











 京公网安备 11010802033920号
京公网安备 11010802033920号