










1.1. 单片机代码处理
// 定义定时器预分频,定时器实际时钟频率为:72MHz/(STEPMOTOR_TIMx_PRESCALER+1)
#define STEPMOTOR_TIM_PRESCALER 3 // 步进电机驱动器细分设置为: 32 细
// 定义定时器周期,输出比较模式周期设置为0xFFFF
#define STEPMOTOR_TIM_PERIOD 0xFFFF
#define FALSE 0
#define TRUE 1
#define CW 0 // 顺时针
#define CCW 1 // 逆时针
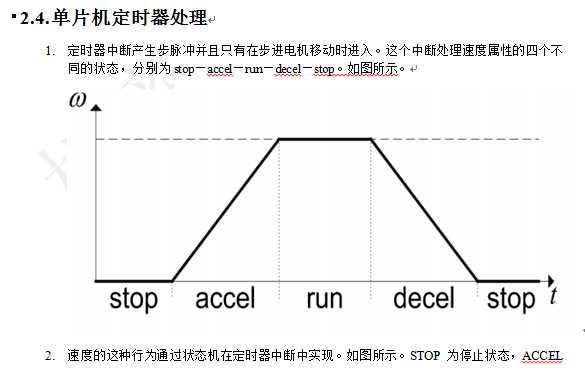
#define STOP 0 // 加减速曲线状态:停止
#define ACCEL 1 // 加减速曲线状态:加速阶段
#define DECEL 2 // 加减速曲线状态:减速阶段
#define RUN 3 // 加减速曲线状态:匀速阶段
#define T1_FREQ (SystemCoreClock/(STEPMOTOR_TIM_PRESCALER+1)) // 频率ft值
#define FSPR 200 //步进电机单圈步数
#define MICRO_STEP 32 // 步进电机驱动器细分数
#define SPR (FSPR*MICRO_STEP) // 旋转一圈需要的脉冲数
// 数学常数
#define ALPHA ((float)(2*3.14159/SPR)) // α= 2*pi/spr//
#define A_T_x10 ((float)(10*ALPHA*T1_FREQ))
#define T1_FREQ_148 ((float)((T1_FREQ*0.676)/10)) // 0.676为误差修正值
#define A_SQ ((float)(2*100000*ALPHA))
#define A_x200 ((float)(200*ALPHA))
/**
* 函数功能: 相对位置运动:运动给定的步数
* 输入参数: step:移动的步数 (正数为顺时针,负数为逆时针).
accel 加速度,实际值为accel*0.1*rad/sec^2
decel 减速度,实际值为decel*0.1*rad/sec^2
speed 最大速度,实际值为speed*0.1*rad/sec
* 返 回 值: 无
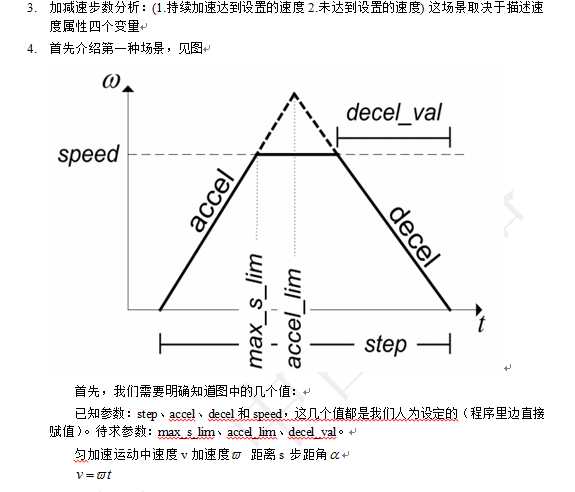
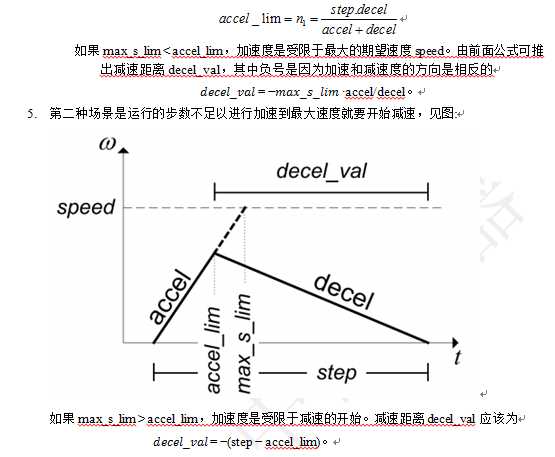
* 说 明: 以给定的步数移动步进电机,先加速到最大速度,然后在合适位置开始
* 减速至停止,使得整个运动距离为指定的步数。如果加减速阶段很短并且
* 速度很慢,那还没达到最大速度就要开始减速
*/
void STEPMOTOR_AxisMoveRel(__IO int32_t step, __IO uint32_t accel, __IO uint32_t decel, __IO uint32_t speed)
{
__IO uint16_t tim_count;
// 达到最大速度时的步数
__IO uint32_t max_s_lim;
// 必须要开始减速的步数(如果加速没有达到最大速度)
__IO uint32_t accel_lim;
if(step < 0) // 步数为负数
{
srd.dir = CCW; // 逆时针方向旋转
STEPMOTOR_DIR_REVERSAL();
step =-step; // 获取步数绝对值
}
else
{
srd.dir = CW; // 顺时针方向旋转
STEPMOTOR_DIR_FORWARD();
}
if(step == 1) // 步数为1
{
srd.accel_count = -1; // 只移动一步
srd.run_state = DECEL; // 减速状态.
srd.step_delay = 1000; // 短延时
}
else if(step != 0) // 如果目标运动步数不为0
{
// 我们的驱动器用户手册有详细的计算及推导过程
// 设置最大速度极限, 计算得到min_delay用于定时器的计数器的值。
// min_delay = (alpha / tt)/ w
srd.min_delay = (int32_t)(A_T_x10/speed);
// 通过计算第一个(c0) 的步进延时来设定加速度,其中accel单位为0.1rad/sec^2
// step_delay = 1/tt * sqrt(2*alpha/accel)
// step_delay = ( tfreq*0.676/10 )*10 * sqrt( (2*alpha*100000) / (accel*10) )/100
srd.step_delay = (int32_t)((T1_FREQ_148 * sqrt(A_SQ / accel))/10);
// 计算多少步之后达到最大速度的限制
// max_s_lim = speed^2 / (2*alpha*accel)
max_s_lim = (uint32_t)(speed*speed/(A_x200*accel/10));
// 如果达到最大速度小于0.5步,我们将四舍五入为0
// 但实际我们必须移动至少一步才能达到想要的速度
if(max_s_lim == 0){
max_s_lim = 1;
}
// 计算多少步之后我们必须开始减速
// n1 = (n1+n2)decel / (accel + decel)
accel_lim = (uint32_t)(step*decel/(accel+decel));
// 我们必须加速至少1步才能才能开始减速.
if(accel_lim == 0){
accel_lim = 1;
}
// 使用限制条件我们可以计算出减速阶段步数
if(accel_lim <= max_s_lim){
srd.decel_val = accel_lim - step;
}
else{
srd.decel_val = -(max_s_lim*accel/decel);
}
// 当只剩下一步我们必须减速
if(srd.decel_val == 0){
srd.decel_val = -1;
}
// 计算开始减速时的步数
srd.decel_start = step + srd.decel_val;
// 如果最大速度很慢,我们就不需要进行加速运动
if(srd.step_delay <= srd.min_delay){
srd.step_delay = srd.min_delay;
srd.run_state = RUN;
}
else{
srd.run_state = ACCEL;
}
// 复位加速度计数值
srd.accel_count = 0;
}
MotionStatus = 1; // 电机为运动状态
tim_count=__HAL_TIM_GET_COUNTER(&htimx_STEPMOTOR); __HAL_TIM_SET_COMPARE(&htimx_STEPMOTOR,STEPMOTOR_TIM_CHANNEL_x,tim_count+srd.step_delay); // 设置定时器比较值
TIM_CCxChannelCmd(STEPMOTOR_TIMx, STEPMOTOR_TIM_CHANNEL_x, TIM_CCx_ENABLE);// 使能定时器通道
STEPMOTOR_OUTPUT_ENABLE();
}
1.2. VS2008仿真曲线()
假设运动无限远距离,速度一般,计算达到最大速度的理论步数与实际步数
其中速度 加速度 减速度 都是放大10倍的
问题点: max_s_lim为理论加速步数,accel为实际加速步数,
/* 类型定义------------------------------------------------------------------*/
typedef struct {
uint8 run_state ; // 电机旋转状态
uint8 dir ; // 电机旋转方向
int32 step_delay; // 下个脉冲周期(时间间隔),启动时为加速度
uint32 decel_start; // 启动减速位置
int32 decel_val; // 减速阶段步数
int32 min_delay; // 最小脉冲周期(最大速度,即匀速段速度)
int32 accel_count; // 加减速阶段计数值
}speedRampData;
// 定义定时器预分频,定时器实际时钟频率为:MHz/(STEPMOTOR_TIMx_PRESCALER+1)
#define STEPMOTOR_TIM_PRESCALER 3 // 步进电机驱动器细分设置为: 32 细分
//#define STEPMOTOR_TIM_PRESCALER 7 // 步进电机驱动器细分设置为: 16 细分
//#define STEPMOTOR_TIM_PRESCALER 15 // 步进电机驱动器细分设置为: 8 细分
//#define STEPMOTOR_TIM_PRESCALER 31 // 步进电机驱动器细分设置为: 4 细分
//#define STEPMOTOR_TIM_PRESCALER 63 // 步进电机驱动器细分设置为: 2 细分


上一篇:LCD1602液晶显示模块深入详解之软件篇(AVR)
下一篇:解决“检测到 #include 错误
- 热门资源推荐
- 热门放大器推荐
 AD8031BN
AD8031BN
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- AD8315ACP-EVAL,AD8315 评估板,50dB GSM PA 控制器
- LTC3456 的典型应用 - 具有 USB 电源管理器的 2 节、多输出 DC/DC 转换器
- Si826xSDIP6-KIT、Si826x SDIP6 评估板基于 Si826x 系列基于 CMOS 的 LED 仿真器输入 ISOdrivers
- L78L09AB可调输出稳压器的典型应用
- [实测通过]AC6905AMP3集成应急移动电源升压
- AM1/4S-1203SZ 3.3V 0.25 瓦 DC/DC 转换器的典型应用
- 使用 Analog Devices 的 ADG508A 的参考设计
- TS9010DCX5 RF 150mA, 1.8V CMOS LDO with Enable 典型应用电路
- 使用 2.5V 外部基准的 AD5307 4 缓冲、8 位 DAC 的典型应用
- 使用 Analog Devices 的 AD9640 的参考设计












 京公网安备 11010802033920号
京公网安备 11010802033920号