接触嵌入式以来,汇编来来回回学了好几遍,感觉还是有几个地方不清楚,所以在这里做一下总结,基本的非常简单的指令就不多余介绍了,主要分享一些个人觉得虽然微不足道,但是对于理解ARM汇编有帮助的一些知识
在这里一定要说一下,刚开始学的时候步入了一个大坑,我以为我学的是ARM汇编,后来了解到了,原来是GNU汇编,怪不得我有些问题去网上找的时候迷迷糊糊的,直到最近才纠正过来
所以首先就是介绍一下这两种汇编有什么区别
ARM汇编与GNU汇编区别
ARM汇编开发,有两种开发方式,一种是使用ARM汇编,一种是使用ARM GNU汇编。
两种汇编开发,使用的汇编指令是完全一样的。
区别是宏指令,伪指令,伪操作不一样。
有上述区别的原因就是 两种开发方式所使用的编译工具不一样。
在指令表示方面: ARM汇编指令都是大写 GNU汇编指令都是小写
两种常用的ARM的编译开发环境 :
DS5、MDK、keil:ARM提供的集成开发软件。使用的是ARM提供的工具链进行程序编译。
GNU开发环境: 由GNU的汇编器as,交叉编译器gcc,和链接器ld等组成。
因为我们使用的是GNU的交叉编译工具链,所以我们使用GNU汇编。
虽说我们使用GNU汇编,但我开始学错了,记了好多ARM汇编的笔记,在这里也分享出来(主要是不能浪费了),然后会将ARM汇编与GNU汇编的异同列举出来,大家对照着看完的话会有不一样的收获
完整汇编语句(适用于ARM汇编与GNU汇编)
汇编语言局限于硬件平台 以下面不同平台举例(68k为摩托罗拉的一个架构)
# 向一个寄存器中的一个值加100
x86: add eax, #100
68k: ADD #100,d0
ARM: add r0, r0, 100
ARM汇编指令格式
Operation{cond}{s} Rd, Rn, Operand2
# 一条汇编指令可分为6个部分,存在2个可选项
#1. Operation 表示操作指令
#2. {cond} 可选项,表示条件,例如 eq(相等)
#3. {s} 可选项,表示状态,例如 n z 也就是上文提到的CPSR寄存器的标志位
#4. Rd 英文rigister direction 即 目标寄存器
#5. Rn 即 源寄存器
#6. 后续附加操作
接下来将上面的完整的汇编指令引申到32位的二进制指令
所以汇编与二进制指令是一一对应的关系
# 可能有错误,但意思是这么个意思
[7:0]表示 Operand2
[11:8] 表示 Rn
[15:12] 表示 Rd
[19:16] 表示 s
[24:20] 表示 cond
[27:25] 为保留
[31:28] 表示 Operation
汇编入口(只适用于ARM汇编)
# 下面一行表示 名字叫做 (Example) 的 (只读 READONLY) (代码 CODE) (区域 AREA)
AREA Example, CODE, REANONLY
# 下面一行ENTRY 表示入口
ENTYR
# 下面一行 表示32位编码,与16位的Thumb编码对应
CODE32
# 下面一行表示 固有label标号,表示代码在这里开始执行
START
汇编指令
# 下面一行 表示代码结束
END
状态码status
这里也需要结合上文ARM体系结构提到的CPSR寄存器
status码也紧跟在操作码以后
例如 MOVC 表示 先进位再操作
寻址方式
单寄存器访问
立即数寻址
ADD R0,R0,#0X3F
立即数即代表一个数字, 立即数寻址表示在寄存器与一个数字之间操作
寄存器寻址
ADD R0,R1,R2 只在寄存器之间操作,不涉及内存。
内存靠地址寻找,寄存器靠名字寻找
寄存器间接寻址
ADD与MOV指令只能操作寄存器,不能操作内存。
操作内存使用LDR与STR指令 MOV指令 可以在寄存器之间传输数据,也可以将立即数传输到寄存器
使用如下指令使数据在内存与寄存器之间传递
LDR R0,[R1] 表示将R1对应内存的数据放到R0
STR R0,[R1] 表示将R0里面的数据放到R1对应的内存
c语言中指针的解引用也使用这种方式
寄存器移位寻址
ADD R3,R2,R1,LSL#2 表示R1左移两位加上R2再赋值给R3,LSL表示左移
基址地址寻址
LDR R0,[R1,#4] 表示R1地址加4的地址处的值放到R0
LDR R0,[R1],#4 表示R1地址处的值取出再加4放到R0
LDR R0,[R1,R2] 表示R1加R2对应的内存地址的值放到R0
相对寻址
BL NEXT 表示跳转到NEXT,并且保存跳转前的地址到LR寄存器
相当于计算pc指针的偏移量来进行跳转
多寄存器内存访问
原型: STM LDM
变种:
STMIA xx {xx} 表示将后面连续寄存器地址的值写入前面所指的内存中去
LDMIA xx {xx} 表示读取前面所指内存的值放到后面连续的寄存器中
这里一定要注意单寄存器与多寄存器的存取方向是正好相反的
数据块模式:
A 表示 after 传送前
B 表示 before 传送后
I 表示 increase 自增4字节
D 表示 decrease 递减4字节
IA 表示传送前地址加4
IB 表示传送后地址加4
DA 表示传输前地址减4
DB 表示传输后地址减4
默认情况下:
STM = STMIA
LDM = LDRIA
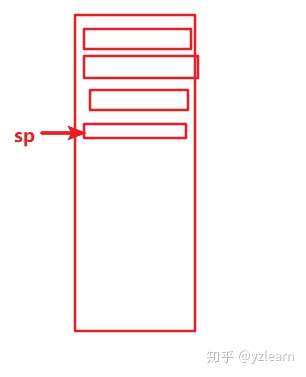
堆栈模式: 也是多寄存器寻址的方式
但是多寄存器寻址的位置是任意的
ldria sp! {xxx} 表示在堆栈上连续读取多个数据到寄存器
是一种压栈和出栈的实现方式
跳转指令
长指令跳转,直接操作pc寄存器
短指令跳转,使用bl 或者 b 进行跳转
b与bl与bx
b相当于c语言中的goto语句,不回到原来地方
bl相当于将当前地址放入lr寄存器,执行完以后最后一句为mov pc, lr跳回原来的地址继续执行
bx表示带模式跳转,返回原有的模式(例如超级模式)
MRS 与 MSR 记忆方法
这是操作CPSR寄存器的两个命令,具体使用方法不做过多介绍
MRS 表示 Move to Register from Status register英文的其中几个简写
MSR 表示 Move to Status register from Register 英文的其中几个简写
arm汇编伪指令
虽然汇编指令可以实现循环以及跳转等各种工作,但比较繁琐 所以使用带参数宏的方法来实现一些伪指令
伪指令只在汇编器之前作用,汇编之后会翻译成标准的汇编指令集
伪指令分为arm汇编伪指令与GNU汇编伪指令
下面均为 ARM汇编 伪指令
两种伪指令对应关系在后面表格列举出来


.global 是GNU伪指令,表示全局的标签,对外导出
_start 是GNU伪指令,表示起始地址,类似于我们之前提到的ENTYR
指令后缀
ldrb r0, [r1] 指令意思不变,操作数变为一个字节(byte)(8位)
ldrh r0, [r1] 指令意思不变,操作数变为一个半字(half word)16位
ldrs r0, [r1] 指令意思不变,操作数变为有符号数(signed)
movs r0, #0 默认结果为零但不影响CPSR的Z位,加上s以后会影响CPSR标志位
但是以下指令一定会影响标志位
cmp r0, r1 等价于sub r0, r1, 比较结果是否为零,将CPSR中的 Z 标志位置位
cmn r0, r1 等价于add r0, r1 判断两个数是否互补,比较结果是否为零,将CPSR中的 Z 标志位置位
tst r0, #01 等价于 add r0, #01 用于测试某些位是否为1 ,将CPSR中的 Z 标志位置位
teq r0, r1等价于 eor r0, r1 使用异或判断两个寄存器是否相等,将CPSR中的 Z 标志位置位
条件执行后缀
beq 如果条件成立再进行跳转,条件后缀成立取决于之前代码的运行结果。
上一句代码执行结果影响CPSR的标志位
CPSR标志位决定条件后缀是否成立
具体如下表格

GT表示 greater than
LT表示 lower than
E表示 equal
N表示 not
条件码会紧跟在指令的后面,例如 BEQ表示相等再跳转
GNU汇编中 !
! 表示寄存器自增/自减
因为栈是向下增长的。
STMDB SP! {R0-R3} 表示传输完一个数据以后,SP指针也会自减,相当于 PUSH {R0-R3}
同理 LDMIA SP! {R0-R3} 相当于 POP {R0-R3}
加上感叹号以后相当于sp的值会进行实时更新,不然只是一个临时变量在自加,不会改变sp指针的值。
换句话说,加上感叹号代表sp实时指向栈顶,但是不加的话,数据虽然保存到栈里,但指针还是指向原来的位置。
pc指针
由于三级流水线的关系
pc指向正在被取指的指令
真正被执行的指令为pc - 8
arm伪指令与GNU伪指令的区别

swi
软中断指令,软件模拟中断用来实现操作系统中的系统调用
中断向量表有一个软中断入口 编写操作系统的人才会用到,普通驱动开发基本用不到

mcr 与 mrc 记忆方法
协处理器操作指令
mrc 是 move to register from cp15 从cp15读取数据
mcr 是 move to cp15 from register 向cp15写入数据
这样记忆起来就特别容易,不至于弄乱顺序
协处理器
coperation processor或者写成 coprocessor
soC内部另一个处理核心(不需要CPU参与),协助CPU完成某些功能
ARM设计上可以支持16个协处理器,但是我们常用的一般soC只实现其中的cp15(只实现了这一个)
协处理器和MMU、cache、TLB(这三个概念可以查看之前的文章-ARM体系架构)等处理有关
伪指令
伪指令编译以后不生成机器码
伪指令与编译器有关,因为我们使用的是GNU工具链,所以我们使用GNU伪指令
符号:
@用在行后注释
以 : 结尾的是标号
.点号在GNU汇编中表示当前指令地址
# 下面表示一个死循环
flag:
b flag
# 下面也表示一个死循环
b .
立即数之前要加上#
GNU汇编伪指令
# 声明 _start为外部链接属性
.global _start
# 指定当前段为代码段
.section .text
# 数据类型
.ascii 定义字符
.byte 定义字节
.short 定义两个字节类型数据,相当于c语言中的unsigned short
.word 定义四个字节类型数据 相当于c语言中的unsigned int
.quad 定义八个字节类型数据
.float 定义四个字节类型的数据 相当于c语言中的float
# 以 2的n次方 进行字节对齐
.align n
下面表示定义一个unsigned int 类型变量 变量名为 a 变量值为123
a:
.word 123
ldr指令 与 ldr伪指令
ldr指令需要考虑合法立即数与非法立即数 ldr伪指令不需要考虑立即数是否合法
ARM指令只有32位,包括指令标记等,所以32位不能全部用来放数字
所以就有了合法立即数与非法立即数的区别
经过任意位数移位后非零部分可以用8位表示的称为合法立即数
但我们使用的ldr 伪指令,他会自动判断是合法还是非法立即数,如果非法,它会自动转成合法立即数
伪指令与指令的区别在于立即数之前是=还是#
为 = 表示ldr伪指令
为 # 表示ldr指令
所以 99% 的情况下都会使用伪指令
寄存器改名
汇编语言的时候直接写这些寄存器的名字就可以
但是芯片厂商也可以自己改变寄存器的名字
方便厂商更加方便的定制
cotex A 系列引入的机制
四种栈
空栈表示栈顶指针指向最后一个数据的下一个内存位置,相当于栈顶指针指向一个空元素

满栈表示栈顶指针指向栈顶的最后一个数据,相当于指向一个元素
增栈 表示栈的增长是向内存地址高的位置进行增长
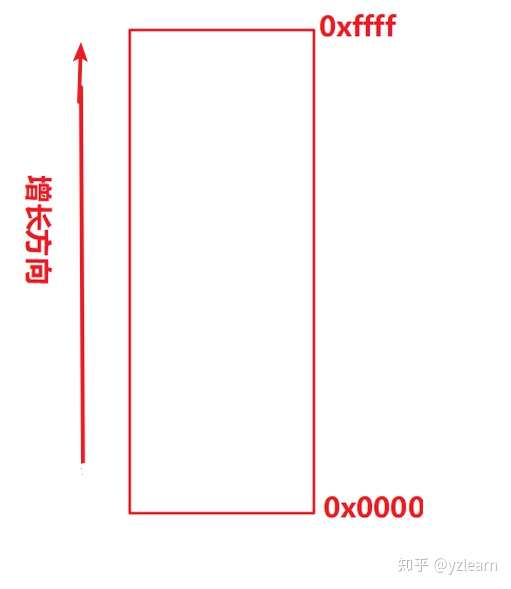
减栈 表示栈的增长是向内存低的位置进行增长
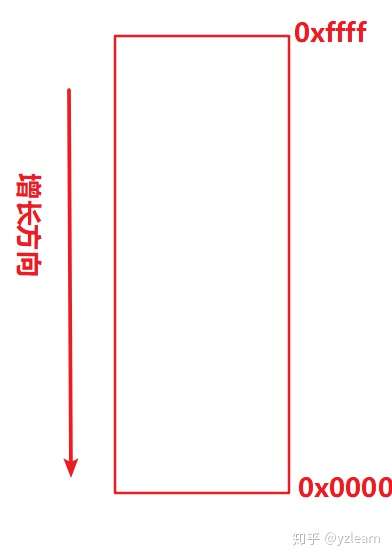
ARM体系结构正常情况下都是满减栈
c/c++程序中嵌入汇编
格式: __asm [volatile] {instruction} 限制条件:
不能直接向pc赋值,程序跳转使用b或者bl指令
在使用物理寄存器的时候,不能使用过于复杂的c表达式,比买你屋里寄存器中途
尽量使用R0-R7通用寄存器
C语言调用汇编(不常用)
汇编export
c语言定义 extern function
c语言使用
c语言和汇编语言之间传递参数是通过对应的R0-R3来传递的,即R0第一个参数,以此类推,多于4个参数是借助栈完成,函数返回值通过R0来传递,这个规定叫做ATPCS(ARM Thumb Procedure Call Standard),具体见ATPCS规范
汇编调用c语言
c语言实现函数
汇编import导入函数名
bl 函数名
上一篇:一文看懂arm架构和x86架构有什么区别
下一篇:ARM汇编语言 - 简介 [一]
推荐阅读最新更新时间:2024-11-02 16:39

 usb_host_device_code
usb_host_device_code 嵌入式实时操作系统的多线程计算-基于ThreadX和ARM
嵌入式实时操作系统的多线程计算-基于ThreadX和ARM 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- EVAL-AD5932EB,用于 AD5932 可编程单扫描波形发生器的评估板
- 户外便携式小火炉
- 使用 ColdFire MCF5208 拆分总线架构的系统设计,适用于 3.3V、32 位 SDR SDRAM 系统
- L7808C 0.5 至 10 V 输出稳压器的典型应用
- 使用具有 B 类 EMI 滤波(单输出)的 RP10-2412DA DC/DC 转换器的典型应用
- UC2844B 高性能电流模式 PWM 控制器的典型应用
- STC15W408AS单片机时钟
- 土豆远控4G远程遥控车ppm发射端带屏幕V3.0|4G遥控车
- LTC3853 的典型应用 - 三路输出、多相同步降压型控制器
- MAXREFDES1132:使用MAX17596的2W DC-DC反激转换器






- 泰克技术摩天轮——技术资料与活动的大融合!
- 【EEWORLD第八届社区明星人物】10月明星人物
- 免费体验业界最快编译速度&最好性能 Quartus II v15.0网页版下载有礼!
- Digi-key干货视频教程来袭,意见领袖讲解疑难设计问题,带你突破成长瓶颈~
- 有奖电源小课堂 | PI 1250V高压氮化镓芯片
- 英飞凌家用暖通空调解决方案邀你拆盲盒
- 基于PolarFire® SoC FPGA的Microchip非对称多处理(AMP)解决方案
- 【在线研讨会】ADI RadioVerse™技术与集成DPD算法的RF收发器AD9375
- 阅读并了解 TE Connectivity 无创想,不奇迹 精彩专题,答题有礼!
- #Micropython大作战#第三弹:抢楼!大家一起来整理micropython资料






 京公网安备 11010802033920号
京公网安备 11010802033920号