主要性能:
与MCS-51单片机产品兼容 、8K字节在系统可编程Flash存储器、 1000次擦写周期、全静态操作:0Hz~33Hz 、三级加密程序存储器 、 32个可编程I/O口线、三个16位定时器/计数器八个中断源、全双工UART串行通道、 低功耗空闲和掉电模式 、掉电后中断可唤醒 、看门狗定时器 、双数据指针、掉电标识符 。
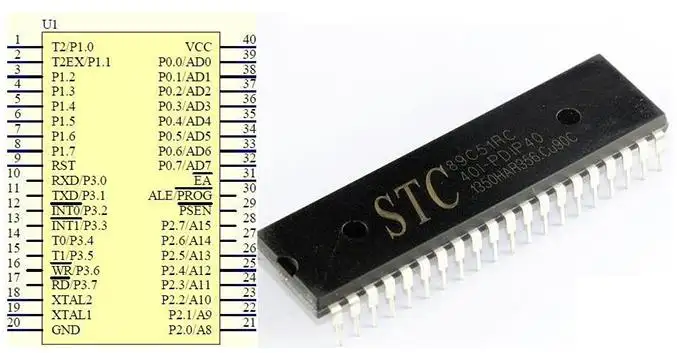
一、STC89C51单片机外部引脚简介
电源及时钟引脚:Vcc(40脚)、GND(20脚)、XTAL1(19脚)、XTAL2(18脚)。
Vcc、GND——单片机电源引脚,不同的型号单片机接入对应电压电源,常压为+5V,低压为
+3.3V。
XTAL1、XTAL2——外接时钟引脚。XTAL1为片内震荡电路的输入端,XTAL2为片内震荡电路的输出端。8051的时钟有两种方式,一种是片内时钟震荡方式,需要在这两个脚外接石英晶体和震荡电容,震荡电容的值一般取10p~30p;另一种是外部时钟方式,将XTAL1接地,外部时钟信号从XTAL2脚输入。
编程控制引脚。如RST(复位)、PSEN(29脚)、ALE/PROG(30脚)、EA/Vpp(31脚)。
RST(9脚)——单片机复位引脚。当输入连续两个机器周期以上高点平时有效,用来完成单片机的复位初始化操作,复位后程序计数器PC=0000H,单片机从程序储存器的0000H单元读取第一条指令码。即单片机从头开始执行程序。
PSEN(29脚)—— 程序存储器允许输出控制端。读取外部程序存储器时PSEN低电平有效,以实现外部程序存储器单元的读操作(了解即可)。
ALE/PROG(30脚)—— 在单片机扩展外部RAM时,ALE用于控制把P0口的输出低8位地址送锁存器锁存器来,以实现地位地址和数据的隔离。(了解即可)。
EA/Vpp(31脚)—— EA接高电平时,单片机读取内部程序存储器。当扩展有外部ROM时,当读取完内部ROM后自动读取外部ROM。EA接低电平时,单片机直接读取外部ROM。
I/O口引脚 —— P0口、P1口、P2口、P3口。
P0口(39-32脚)——双向8位I/O口,每个口可独立控制,没有上拉电阻,为高阻态,所以不能正常的输出高低电平,因此该组IO口在使用时务必要接上拉电阻,一般选10千欧。
P1口(1-8脚)——准双向8位IO口,每个口可独立控制,内带上拉电阻,这种接口输出没有高阻状态,输入也不能锁存,故不是真正的双向IO口。之所以称它为准双向,是因为该口在作为输入使用前,要先向该口进行写1操作,然后单片机内部才可正确的读出外部信号,也就是要使其先有个“准”备的过程,所以说才是准双向接口。
P2口(21-28脚)—— 准双向8位I/O口,每个口可独立控制,内带上拉电阻,与P1口相似。
P3口(10-17脚)——准双向8位IO口,每个口可独立控制,内带上拉电阻。作为第一功能可以当做普通I/O口,与P1口相似。P3口可做第二功能使用。参照下表:

二、电平特性
单片机的输入输出电平为TTL电平,其中高电平为+5V,低电平为0V。计算机串口为RS-232电平,其中高电平为-12V,低电平为+12V。注意,RS-232为负逻辑电平。
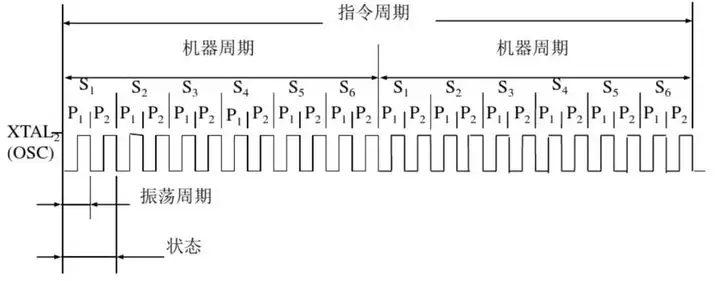
三、单片机的几个周期介绍
(1)时钟周期。也称为震荡周期,定义为时钟频率的倒数(可以这样来理解,时钟周期就是单片机外接晶振的倒数,
如12MHz的晶振,它的时钟周期就是1/12us)它是单片机中最基本的、最小的时间单位;在一个时钟周期内,CPU
仅完成一个最基本的动作。对于某个单片机来讲,若采用了1MHz的时钟频率,则时钟周期就是1us;若采用4MHz
的时钟频率,则时钟周期就是250us。由于时钟脉冲是CPU的基本脉冲,它控制着CPU的工作节奏(使CPU的每一步
都统一到它的步调上来)。显然,对同一种单片机,时钟频率越高,单片机的工作速度就越快。但是,由于不同的
单片机内部硬件电路和电气结构不完全相同,所以其所需的时钟频率范围也不一定相同。我们使用的STC89C系列的
时钟范围约在1MHz~40MHz。
(2)状态周期。它是时钟周期的两倍。
(3)机器周期。单片机的基本操作周期,在一个操作周期内,单片机完成一项基本操作,如取指令、存储器读/写等。它由12个时钟周期(6个状态周期)组成。
(4)指令周期。它是指CPU执行一条指令所需要的时间。一般一个指令周期含有1~4个机器周期。
四、移位操作
左移。C51操作符为“<<”,最低位补零
右移。同上
循环左移,最高位移入最低位,其他依次向左移一位。
五、数码管显示原理
电路方面有共阴极和共阳极之分,让数码管显示不同的数字就是先定义一个保存16进制数的数组,然后在程序中把这个16进制数赋值给相应的引脚。
六、中断概念
51单片机一共有6个中断源
INT0——外部中断0
INT1——外部中断1
T0/1/2——计时器/定时器中断,由计数器满回零引起。
T1/R1——串行口中断,串行端完成一帧字符发送/接收后引起。
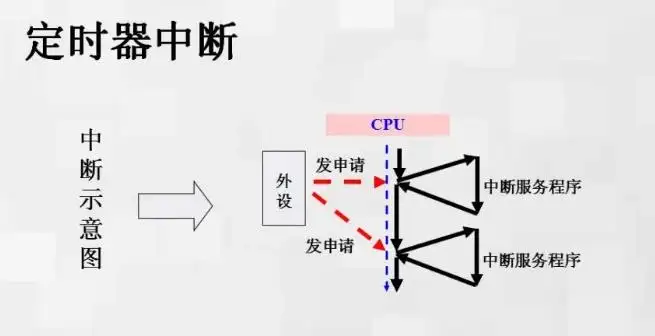
七、单片机的定时器中断
51单片机内部共有两个16位可编程的定时器/计数器,即定时器T0和定时器T1。它们既有定时功能又有计数功能。定时器/计数器的实质是加1计数器(16位),由高8位和底8位两个寄存器组成,TMOD寄存器是定时器/计数器的工作方式寄存器,确定工作方式和功能;TCON是控制寄存器,控制T0,T1的启动和停止以及设置溢出标志。
加一计数器的输入计数脉冲有两个来源,一个是由系统的时钟振荡器输出脉冲经12分频后送来;另一个是T0或T1引脚输入的外部脉冲源。如果定时器/计数器工作在定时模式,则表示时间已到;如果工作在计数模式,则表示计数值已经满了。
定时器初始化过程如下:
①对TMOD赋值,以确定T0和T1的工作方式
②计算初值,并将初值写入TH0、TL0或TH1、TL1中。
③中断方式时,则对IE赋值,开放中断。
④使TR0或TR1置位,启动定时器/计数器定时或计数

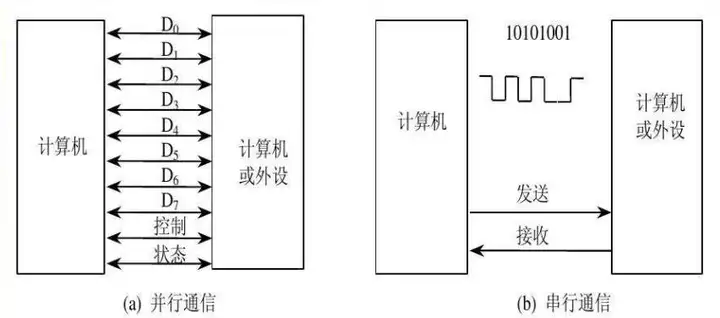
八、并行与串行基本通信方式
1、并行通信方式:将数据字节的各位用多条数据线同时进行传输,每位数据都需要一条传输线。
2、串行通信方式:串行通信是将数据字节分成一位一位的形式在一条传输线上逐个的传输,此时只需要一条数据线
3、异步串行通信方式:指通信的接收与发送设备使用各自的时钟控制数据的发送和接收过程。其特点是:不要求发送双方时钟严格一致,容易实现,设备开销小,但每个字符要附加2~3位,用于起始位、校验位、停止位,各帧之间还有间隔,因此传输效率不高。在单片机与单片机之间,单片机与计算机之间通信时,通常采用异步串行通信方式。
4、同步串行通信方式:同步通信时要建立发送方时钟对接收方时钟的直接控制,使双方完全达到同步。
上一篇:单片机led灯闪烁实验总结_玩转51单片机(1):点亮led灯
下一篇:51单片机的内部结构及其功能作用
推荐阅读最新更新时间:2024-11-11 10:36

 传感器原理及应用电路设计 (陈书旺,宋立军,许云峰主编)
传感器原理及应用电路设计 (陈书旺,宋立军,许云峰主编) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题














 京公网安备 11010802033920号
京公网安备 11010802033920号