今天来跟大家普及一下stm32f103单片机的最小系统组成和各部分功能。
一、 什么叫最小系统
最小系统就像我们人,我们活着每天都要吃饭,喝水。
饭和水就是我们的”燃料”,离开它们我们就挂逼了。
其实在芯片的世界也一样,单片机想要正常运行,它也需要”燃料”,这些燃料的组成就是最小系统。
二、 “燃料”都由什么组成?
1. 电源

拿STM32F103C8T6这个型号来说,总共有5个接电源正极和4个接地引脚,分别给内部不用的模块供电。
VDD:就是单片机的供电电压。
VDDA:VDD后面有个A,A=Analog,表示模拟的意思,就是芯片内部模拟器件的工作电压。
VSSA:表示模拟器件的公共端地。
VBAT:给后备区域供电,维持RTC/BKP寄存器这些数据掉电保存,一般是接纽扣电池,如果不需要可以直接接电源。

根据数据手册的说明,这几个引脚的供电电压最大不能超过3.6V。
说到数据手册,作为一个英语渣,这里多说一句,不要怕全是英文,不用全看懂,抓关键的地方看,其实来来去去就那几个英文。
2. 复位电路

复位电路的作用就是,板子上电的瞬间给单片机复位引脚(NRST)一个短暂的低电平,让单片机程序复位,把除了备份区域寄存器以外所有寄存器状态恢复原始状态。
简单来说就是让程序重头开始跑。
复位电路的原理是利用RC电路的充放电原理,在上电瞬间为NRST引脚产生一个短暂的低电平。
刚上电的时候电流会通过R19和C20到地,为C20充电,此时NRST的引脚为低电平。
当C20充满电以后,C20就处于”断路”的状态,此时NRST由低变高电平。
3. 外部晶振电路
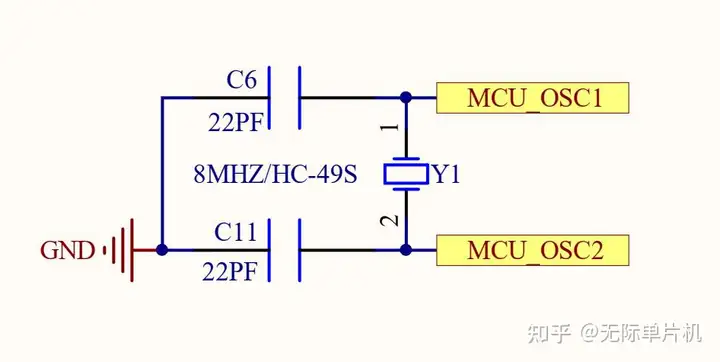

系统时钟一般是加外部晶振电路,相当于给单片机一个心跳。
就跟人的心跳一样,没心跳肯定就GG了。
同样,单片机没心跳也跑不起程序。
这个心跳也是一个时机基准,为单片机系统时钟、定时器之类的提供时间的基准。
我们最终计算定时器的时间,都跟这个晶振息息相关。
4. 烧录口
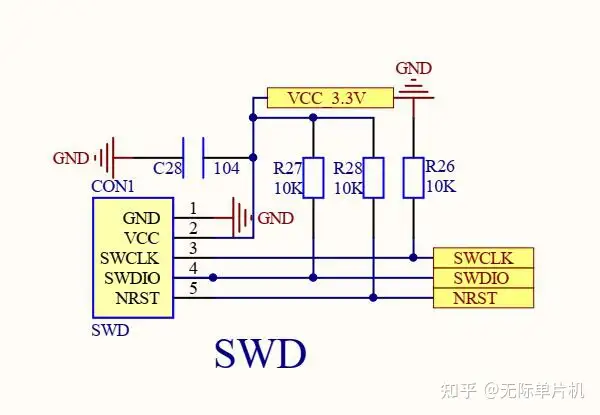
烧录口的作用就是给单片机烧录程序,注入灵魂。
STM32的烧录方式有几种,实际产品开发一般用SWD接口烧录,占用尺寸空间少,一般只需要5根线,也有些用4根线的,就是vdd不接,不接vdd烧录要单独给板子供电。
5. Boot0和Boot1
Boot0和Boot1是用来选择STM32单片机的启动方式的。

如果上图你看不懂什么意思,不要慌,正常的。
简单来说,大家要想正常跑程序就要把Boot0和Boot1都接到地,就是正常工作模式。
如果我们要使用串口烧录,也就是ISP,就需要把BOOT0接到电源,BOOT1接到地,烧录完以后再全部接到地,相对麻烦很多。
这也就是为什么我只用SWD烧录的原因,直接全部接地就行了。

通过上面这些电路的组合,单片机就能正常跑程序了。
如何验证你程序有没有正常在跑?
我一般在开发产品的时候,首先会把LED的驱动调出来获取安全感,让它每秒闪一次。
防止程序死机了我还傻乎乎继续写程序,写到后面程序大了,找起问题来更浪费时间。
上一篇:stm32怎么用keil软件进行调试
下一篇:STM32单片机中C语言操作寄存器的原理
推荐阅读最新更新时间:2024-11-09 10:13

 传感器原理及应用电路设计 (陈书旺,宋立军,许云峰主编)
传感器原理及应用电路设计 (陈书旺,宋立军,许云峰主编) CADENCE高速电路板设计与仿真:原理图与PCB设计
CADENCE高速电路板设计与仿真:原理图与PCB设计
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- CH340N烧录器TTL,带ESP io0下载按键
- LTC3624EMSE-3.3 3.3V 输出电压、2A 同步降压稳压器、同步至 500kHz、强制连续模式的典型应用
- 16 位、125KSPS、4 通道便携式 DAC
- LM324ADTBR2G 参考电压运算放大器的典型应用
- 具有可编程软启动功能的 NCP59748 1.5 A、双轨极低压降线性稳压器的典型应用
- 用于高功率因数和有源谐波滤波器的 TDA 4862 功率因数控制器 (PFC) IC 的典型应用
- AD8604ARUZ 高端运算放大器电流监视器的典型应用
- LT3663EMS8E-3.3、5V 降压转换器的典型应用
- 用于数码相机的 ASIC 视频系统
- 基于APM32和涂鸦智能的主从式环境监测显示器












 京公网安备 11010802033920号
京公网安备 11010802033920号