前言
这篇文章主要是看视频学习51汇编,但是我的环境总是配置不好,出现了这个问题(keil2+vdmagdi.exe+Proteus),有懂的小伙伴可以帮助一下我 ^.^

一、延时程序
1.1 延时程序的简介和分类
在单片机的控制应用中,常有延时的需要,CPU 过一段时间再去做某件事,称之为延迟。延时有两种方法,即软件延时和硬件延时
硬件延时是通过定时/计数器(中断程序)来实现的,这种方法不占用 CPU 的工作时间
软件延时一般采用循环程序,通过 CPU 执行一个具有固定延迟时间的循环体来实现的
1.2 软件延时
1、机器周期数
延时程序的延时时间主要与两个因素有关,一是所用晶振,二是延时程序中的循环次数,一旦晶振确定之后,则主要是如何设计与计算需给定的延时循环次数

晶振产生一个波形,这个波是有固定周期的,每个汇编指令执行的周期不同,下面是给出的指令和他的周期数

2、机器周期数求解
假设我们的晶振频率为 10Hz,产生的波形如下图

则 1 秒内震荡 10 次,1 秒 10 个时钟周期
2 个时钟周期是 1 个状态周期,1 机器周期是 6 个状态周期
单片机的晶振频率为 6MHz,则一机器周期为 2us;单片机的晶振频率为 12MHz,则一机器周期为1us;
1.3 基本延时程序模式及延时时间的计算
1、单循环延时程序
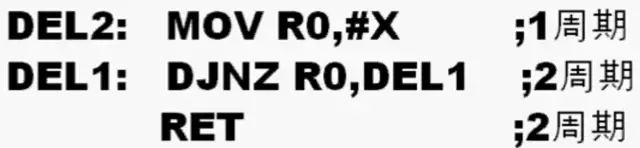
把上面的汇编程序封装成一个过程(汇编里面常用过程来表示函数的意思)
先把 #X (#后面的是立即数)数据移动到 R0 寄存器里面,然后循环执行 DJNZ 指令。DJNZ 指令的含义就是 R0 寄存器减少 1,如果 R0 不为 0,就跳转到标号为 DEL1 处执行;如果 R0 为 0 就继续往下执行
所以上述程序:

执行 X 个数次的 DJNZ 函数,总共 2*X*T 时间(T 为机器周期)。执行一次 MOV 函数,消耗 T 时间。执行一次 RET 跳出过程的指令,消耗 2T 时间(指令消耗的机器周期数在前面的图片中有写)
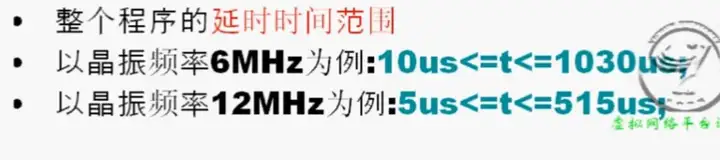
延时时间范围计算
设 X 是装入寄存器 R0 的时间常数,R0 是 8 位寄存器(以下的 R1、R2、R 均是 8 位),因为 0<=R0<=255,R0=0,延时时间最长,RO=1,延时时间最短。当 R0=0 时,由汇编语言的特征知其将从零开始判断,共 256 次,所以应在公式中代入 256,因此这个程序的最长定时时间为 1030us
2、双重循环延时程序

MOV R1,Y 执行了 1 次
MOV R0,X;DJNZ R1,DEL2 两条语句执行了 Y 次
DJNZ R0,DEL1 语句执行了 X*Y 次
3、三重循环延时程序

4、设计一个延时为 100us 的程序

让延时精确到 100us 的方法如下
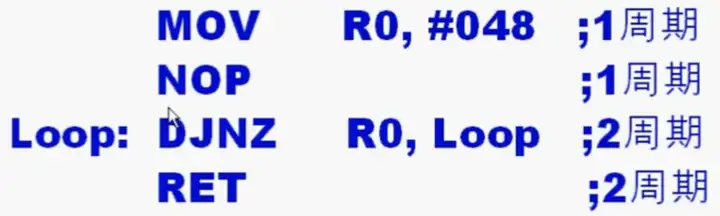
NOP 是占位,不进行任何操作的汇编指令
二、汇编指令控制灯亮灭
2.1 单灯亮灭
1、电路图

XTAL1、XTAL2 接的是晶振,为单片机提供时钟脉冲信号
RST 为复位电路引脚
2、汇编程序

ORG:告诉单片机,下一条执行的指令起始位置
SETB 指令:将 P1.0 引脚置 1,让灯泡灭
LCALL 指令:调用 DELAY 延时过程
CLR 指令:寄存器清 0 指令,让灯泡亮
AJMP 指令:跳转到 START 循环执行这个过程
2.2 多灯亮灭
1、电路图

2、汇编程序

与单灯相比,单灯用的是位操作,这个是整体的地址赋值
2.3 开关控制灯亮灭
1、电路图

2、汇编程序

JB P0.0, LIG 指令:如果 P0.0 引脚为 1(高电平),则跳转到 LIG 过程,LIG 过程把等电平信号置为 0(低
电平),灯就亮;否则不跳转到 LIG,电平信号置为 1(高电平),灯就灭
2.4 多开关控制多灯泡
1、电路图

2、汇编代码

前面的代码依次判断每个灯需要亮或者灭。在 next1 前判断 P1.0 的亮灭,在 next2 前判断 P1.1 的亮灭。
3、电路图2

4、汇编程序2

把低 4 位的输入数据和高 4 位进行调换,再把高 4 位送到控制灯亮灭的地方,然后调用延时,延时程序用于软件防止抖动。最后调用循环函数
上一篇:51单片机汇编——延时和点灯
下一篇:51单片机学习——存储和引脚
推荐阅读最新更新时间:2024-11-17 23:02

 西门子PLC编程技术及应用案例 (刘振全,王汉芝,杨坤等编著)
西门子PLC编程技术及应用案例 (刘振全,王汉芝,杨坤等编著) 西门子S7-1200-PLC编程及应用教程(第3版) (侍寿永 主编)
西门子S7-1200-PLC编程及应用教程(第3版) (侍寿永 主编) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- AD8058ARM-EBZ,高速通用评估板专为具有 AD8058ARMZ 功能而设计,还可帮助客户快速制作新的双运算放大器电路原型并缩短设计时间
- NAZE32 有刷飞控
- LM324EDR2G 维恩桥振荡器运算放大器的典型应用
- AL5811EV2,使用 AL5811、75mA、60V 低侧可调线性 LED 驱动器的评估板
- STEVAL-ILL041V1,在非常规电路中使用 L6564 功率因数控制器的演示板,降压开关
- LTC6261HS6 音频耳机桥式驱动器运算放大器的典型应用
- NCP340MUTBGEVB:受控 3.0 A 负载开关、软启动、评估板
- 使用 Analog Devices 的 LM337 的参考设计
- 用于 MC9S08JM60 8 位 HCS08 MCU 的 3PHASELV-KIT、3 相 BLDC/PMSM 低压电机控制驱动器,用于开发 BLDC/PMSM 电机控制应用
- AMIS-42665 CAN 收发器的应用电路,CMV = +12V












 京公网安备 11010802033920号
京公网安备 11010802033920号