一、代码执行总体流程图
1.1 代码路径
U-boot.lds (archarmcpu)
vectors.S (archarmlib)
start.S (archarmcpuarm920t)
lowlevel_init.S (boardsamsungjz2440)
crt0.S (archarmlib)
relocate.S (archarmlib)
Board_init.c (commoninit)
Board_f.c (common)
Jz2440.h (includeconfigs)
Generic-asm-offsets.h (includegenerated)
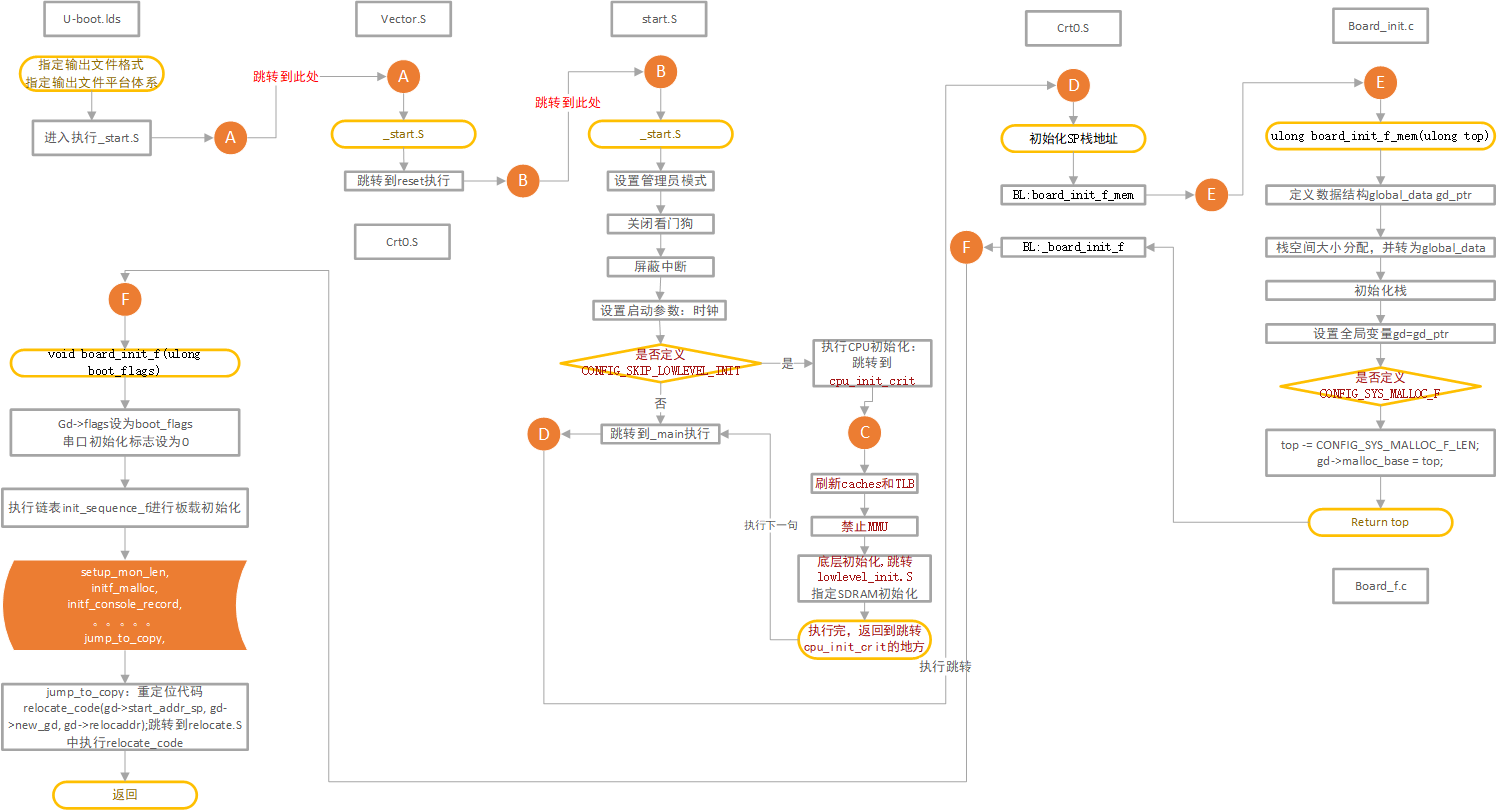
1.2 启动代码流程图
二、链接文件
目录:u-boot-2017.03/arch/arm/cpu
文件:u-boot.lds
编写好的 .lds 文件,在用 arm-Linux-ld 连接命令时带 -Tfilename 来调用执行,如:arm-linux-ld-Tnand.lds x.o y.o -o xy.o
也用-Ttext参数直接指定连接地址,如 arm-linux-ld-Ttext 0x30000000 x.o y.o -oxy.o
既然程序有了两种地址,就涉及到一些跳转指令的区别。
ARM汇编中,常有两种跳转方法:b跳转指令、ldr指令向PC赋值。
要特别注意这两条指令的意思:
1> b step:b跳转指令是相对跳转,依赖当前PC的值,偏移量是通过该指令本身的bit[23:0]算出来的,这使得使用b指令的程序不依赖于要跳到的代码的位置,只看指令本身。
2> ldr pc, =board_init_r :该指令是一个伪指令编译后会生成以下代码:ldr pc, [pc, #8]
从内存中的某个位置读出数据并赋给PC,同样依赖当前PC的值,所以可以用它实现从Flash到RAM的程序跳转。
2种方式指明程序地址,这里分析下第二种方式,在根目录 Makefile文件有如下一行:

在文件 include/configs/jz2440.h 有定义:

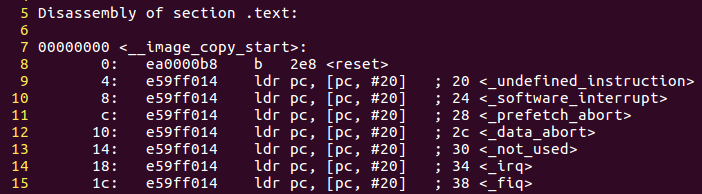
我们在这里可以用下面的命令生成 u-boot.dis文件(注意交叉编译器的名字):
arm-2440-linux-gnueabi-objdump -D -m arm u-boot > u-boot.dis

在0 地址执行的是 _start.S文件,然后跳转到reset执行,接着定义异常向量表:
在u-boot.lds 脚本中并没有指定基地址, 根目录下的 u-boot 脚本是由 arch/arm/cpu/u-boot.lds 在编译的时候生成的,所以如果要修改u-boot.lds 需要找到正确的地方。
u-boot.lds 分析: 1 #include 2 /* 指定输出可执行文件是elf格式,32位ARM指令,小端模式 */ 3 OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm") 4 OUTPUT_ARCH(arm) /* 指定输出文件的的平台体系为ARM */ 5 ENTRY(_start) /* 指定可执行映像文件的起始段的段名是 _start,这里跳转到vector.S执行 */ 6 SECTIONS 7 { 8 /DISCARD/ : { *(.rel._secure*) } 9 /* 指定可执行的 image 文件的全局入口点,通常这个地址都发给你法rom(flash)0x0位置。 10 * 必须使编译器知道这个地址,一般不修改此处,而是修改其它地方的宏定义*/ 11 . = 0x00000000; 12 . = ALIGN(4); 13 .text : 14 { 15 /* 映像文件赋值起始地址,它在文件 arch/arm/lib/sections.c 中定义: 16 * char __image_copy_start[0] __attribute__((section(".__image_copy_start")));*/ 17 *(.__image_copy_start) 18 /* arch/arm/lib/vectors.S 里有一句:.section ".vectors" */ 19 /* 这里的 vectors 是让vector.S 链接的二进制文件的开头部分 */ 20 *(.vectors) 21 CPUDIR/start.o (.text*) /* 执行 start.S */ 22 *(.text*) /* 其他代码 */ 23 } 24 25 . = ALIGN(4); 26 /* 只读数据段,所有的只读数据段都放在这个位置 */ 27 .rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) } 28 29 . = ALIGN(4); 30 /* 可读写数据段,所有的可读写数据段都放在这个位置 */ 31 .data : { 32 *(.data*) 33 } 34 35 . = ALIGN(4); 36 37 . = .; 38 39 . = ALIGN(4); /* U-BOOT命令段 */ 40 .u_boot_list : { 41 KEEP(*(SORT(.u_boot_list*))); 42 } 43 44 . = ALIGN(4); 45 46 .image_copy_end : 47 { 48 *(.__image_copy_end) 49 } 50 /* 相对动态信息段 */ 51 .rel_dyn_start : 52 { 53 *(.__rel_dyn_start) 54 } 55 56 .rel.dyn : { 57 *(.rel*) 58 } 59 60 .rel_dyn_end : 61 { 62 *(.__rel_dyn_end) 63 } 64 65 .end : 66 { 67 *(.__end) 68 } 69 70 _image_binary_end = .; 71 72 /* 73 * Deprecated: this MMU section is used by pxa at present but 74 * should not be used by new boards/CPUs. 75 */ 76 . = ALIGN(4096); 77 .mmutable : { 78 *(.mmutable) 79 } 80 81 /* 82 * Compiler-generated __bss_start and __bss_end, see arch/arm/lib/bss.c 83 * __bss_base and __bss_limit are for linker only (overlay ordering) * bss段,里面放置的是初始值为0的全局变量和静态变量,这些变量不会保存在 * 二进制文件中 84 */ 85 86 .bss_start __rel_dyn_start (OVERLAY) : { 87 KEEP(*(.__bss_start)); 88 __bss_base = .; 89 } 90 91 .bss __bss_base (OVERLAY) : { 92 *(.bss*) 93 . = ALIGN(4); 94 __bss_limit = .; 95 } 96 97 .bss_end __bss_limit (OVERLAY) : { 98 KEEP(*(.__bss_end)); 99 } 100 101 .dynsym _image_binary_end : { *(.dynsym) } 102 .dynbss : { *(.dynbss) } 103 .dynstr : { *(.dynstr*) } 104 .dynamic : { *(.dynamic*) } 105 .plt : { *(.plt*) } 106 .interp : { *(.interp*) } 107 .gnu.hash : { *(.gnu.hash) } 108 .gnu : { *(.gnu*) } 109 .ARM.exidx : { *(.ARM.exidx*) } 110 .gnu.linkonce.armexidx : { *(.gnu.linkonce.armexidx.*) } 111 } 链接执行,首先是进入到arch/arm/vector.S 中执行,在其中执行 _start.S ,_start.S 的首行就跳转到 start.S 中的 reset 中去执行了。 这里没有执行SPL,若要加上SPL,则还需要加上 nandflash 链接脚本暂时的流程为: 跳转A处,A代码在Vector.S中,执行_start.S代码,下一节看 _start.S的代码,并分析其过程。 备注:后续会更新此文档
上一篇:u-boot移植(三)---修改前工作:代码流程分析2
下一篇:u-boot移植(一)---准备工作
推荐阅读最新更新时间:2024-11-08 07:46

 得捷大赛代码
得捷大赛代码 实时操作系统RT-ThreadSmart在STM32MP1上的移植
实时操作系统RT-ThreadSmart在STM32MP1上的移植 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用


设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题














 京公网安备 11010802033920号
京公网安备 11010802033920号