南卡罗来纳大学(USC)的研究人员已经研发出一种可以自学走路的机器腿。受到人类以及在出生后几分钟内学会掌握技能的动物的启发,研究人员希望这项研究将在动态假肢和机器人领域开辟新的可能性,这些机器人可以在陌生的环境中即时学习。
“如今,机器人需要相当于数月或数年的培训才能与世界互动,但我们希望实现自然界中的快速学习和适应,”该大学生物医学工程系Francisco J. Valero-Cuevas教授表示。
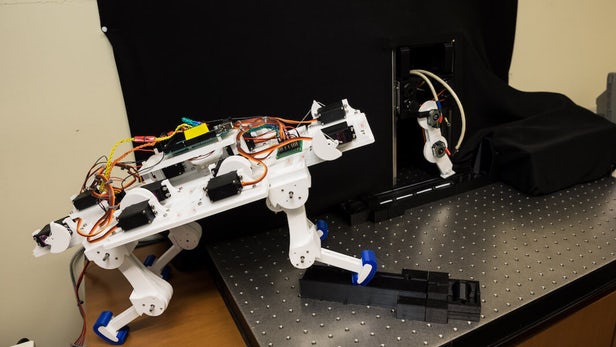
为了实现这一目标,Valero-Cuevas及其同事开发了一种由动物肌腱驱动的机器人腿,并由生物启发的AI算法控制。这些使得机器人能够通过“motor babbling ”或进行重复的探索运动来发展以类似于人类的方式行走的技能。
“腿的这些随机运动允许机器人建立其肢体的内部图及其与环境的相互作用,”该研究的作者、USC工程博士生Ali Marjaninejad表示。
通过自身了解其结构和环境,机器人肢体可以开发自己的个性化步态,并在仅仅五分钟的“motor babbling” 之后学习新的步行任务。研究人员认为,这是第一个能够实现这一壮举的机器人,并对提前开启的可能性感到兴奋。

正如他们所解释的那样,机器人可以被编程为在某些情况下执行某些任务,但是你无法为每种可能性做好准备。另一方面,这些能够根据环境发展自己的个性化运动的机器人将能够承担更广泛的任务。
“如果你让这些机器人从相关经验中学习,那么它们最终会找到一个解决方案,一旦找到,将根据需要投入使用并进行调整,”Marjaninejad表示。“解决方案可能并不完美,但如果情况足够好,将会采用。不是我们每个人都需要或想要 - 或者能够花时间和精力 - 赢得奥运奖牌。”
响应性假肢是这种技术可以产生影响的一个领域,通过允许更直观、自然和自我改善的肢体来帮助残疾人。太空探索可能是另一个领域,机器人可以放置在遥远的天体上,并利用它们的学习能力来调整它们的步态并驾驭未知的地形。
“物种在身体和环境变化时学习和适应运动的能力从一开始就是进化的强大动力,”博士生和研究作者Brian Cohn表示。“就像动物一样,我们的工作是朝着增强机器人学习和适应每种体验迈出的一步。”
该研究发表在《Nature Machine Intelligence》杂志上。
上一篇:全美第二大医疗机构推出AI中心,重点关注技术临床落地
下一篇:VoxelStation像素工作站在手术导航系统中的应用
- 热门资源推荐
- 热门放大器推荐
 机器人手册:第1卷-机器人基础
机器人手册:第1卷-机器人基础



 京公网安备 11010802033920号
京公网安备 11010802033920号