1 主电路拓扑分析
超声电源的主电路采用全桥逆变拓扑结构,如图1所示。其中:Z1~Z4为功率主开关管;D1~D4为Z1~Z4内部反并联寄生二极管;C1~C4为外接并联电容或者功率管的寄生电容;T为高频脉冲变压器;L0为串联调谐匹配电感;PZT为超声换能器。

逆变器部分利用功率管寄生电容和并联电容,以及变压器的漏感实现软开关零电压移相控制(ZVS-PSP-WM)的方式。零电压开关是依靠功率开关管反并联二极管的导通实现功率器件零电压开通;通过功率谐振电容的充电过程来实现功率器件的零电压关断。
在一个开关周期内,移相控制有12种开关模块,在分析之前,做出如下假设:
(1)电路中所有的开关器件Z1~Z4和与其反并联二极管D1~D4均为理想开关器件;
(2)所有的电感、电容为理想元件且不考虑线路的杂散电感值;
(3)不考虑死区加入对逆变器工作的影响;
(4)逆变器的输入电压为恒定电压源。
移相控制逆变器的4个开关管驱动波形如图2所示。逆变器每个桥臂的2个功率管成180°互补导通,2个桥臂的导通角相差1个相位,即移相角。Z1,Z2为定相臂,Z3,Z4为移相臂。其中Z1和Z2分别先于Z3和Z4导通,移相角为φ,调节φ大小即可改变逆变器的输出电压,从而调节输出的正弦波电流幅值,使得输出功率可以调节。

逆变器的工作过程中,功率开关管的导通和关断时间恒定。同一桥臂的两个开关管导通和关断,需要一定的延时时间,防止上下桥臂直通,保证开关管的安全。
2 控制策略
下面对主电路控制策略的工作过程进行作进一步分析,逆变器在工作过程中,功率开关管的导通和关断时间恒定。导通顺序为Z1→Z4→ Z2→Z3,同一桥臂2个开关管的导通和关断,需要一定延时时间,防止上下桥臂直通,保证开关管的安全。
PS-PWM功率控制的逆变电路在1个周期内的主要有以下几种工作模态,如图3所示。

(1)工作模式1[t0时刻](见图3(a)):在t0时刻,Z1和Z4同时导通,电流i的流向:Z1→R→L→C→Z4。
(2)工作模式2[t0,t1](见图3(b)):在t0时刻关断Z1,电流i给C1充电,C3的电荷被抽走。C1的电压从零开始线性上升,C3的电压从E开始线性下降,Z1是ZVS关断。
(3)工作模式3[t,t2](见图3(c)):t1时刻,C3的电压下降到零,D3自然开通,将Z3箝位在零,此时开通Z3,Z3是ZVS开通,此时Z3中没有电流流过。
(4)工作模式4[t,t3](见图3(d)):在t2时刻关断Z4,电流i抽走C2的电荷,同时给C4充电。Z4的电压从零开始上升,Z4是ZVS关断。t3时刻,C4上的电压上升到E,即C2上电荷量为零时,D2自然导通。
(5)工作模式5[t3,t4](见图3(e)):t3时刻,D2导通,将Z2箝位在零,此时Z2开通,因此Z2是ZVS开通。虽然Z2开通,但没有电流流过。t4时刻,D2,D3自然关断,Z2和Z3中将流过电流。
(6)工作模式6[t4,t5](见图3(f)):在t4时刻,电流由正方向过零,并向负方向增加,电流i的流向:Z2→C→L→R→Z3。到t5时刻,Z3关断,逆变器开始另一半周期的工作,工作情况类似上述半个周期。
3 软件设计
在此结合高性能DSP数字芯片设计了一种新颖的超声波电源控制系统,其整个系统硬件设计框图如图4所示。DSP采用TMS320LF2407A,外扩FLASH采用CY7C1021V33-122芯片,PWM为脉冲输出,分别由PWMl,PWM2,PWM3,PWM4引出,并经过集成驱动隔离送至IGBT,控制其导通与关闭。Iset为给定电路,Io,Id,Udt分别为负载电流、逆变器的直流输入电流和电压,将这3路信号分别送至各自的调理电路,经过调理送入DSP的A/D接口。如遇到外部故障,如过热等,向DSP发出中断请求,实施保护。

在此采用TMS320LF2407A来实现PS-PWM算法,利用其EV产生PWM控制信号。功率控制程序的作用是通过将从负载处检测到的电流值与功率设定量相比较,其差值通过数字PI控制算法进行处理,进而得到所需要调整的移相角度θ值,结果返回主程序影响比较单元1(CMPRl)的设定值。PS-PWM功率控制算法如图5所示。

为了保证超声电源正常工作,除设计各种故障的硬件保护电路,同时采用软件保护。保护由硬件、软件共同实现,保证系统可靠运行。软件保护是通过对检测出的信号进行滤波采样后与DSP中断级别最高的XINT2相连接,当故障发生时,进入软件中断程序,封锁所有PWM脉冲输出,实现保护效果。中断保护程序流程如图6所示。

4 仿真及实验结果
基于以上理论分析及系统的硬件与软件设计,用PSpice软件对移相功率控制超声电源进行仿真。如图7、图8所示。

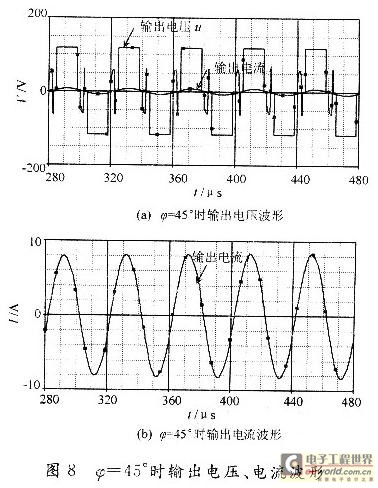
选取的超声换能器型号是DH-6160F-15S-3,其谐振频率为25 kHz,谐振阻抗为15Ω,静态电容为27000 pF,通过计算,其匹配电感为O.75 mH。图7、图8分别给出移相角分别为φ=0°,φ=45°时的输出电压u和输出电流i仿真波形。由仿真波形比较分析,当移相角φ逐渐增大,其输出电压脉宽逐渐减小,电流幅度逐渐减小,可见调节φ的大小即可以实现输出功率的调节。另外,功率管工作在ZVS软开关状态,降低了开关损耗和电压电流应力,逆变器始终工作在负载谐振状态,负载侧的功率因数高,控制简单,提高电源的可靠性。根据前面的设计,对3 kw/30 kHz的超声波发生器进行实验,下面给出逆变桥的驱动波形,PS-PWM控制输出波形,频率跟踪实验波形。图9为θ=60°时Z1和Z4的驱动波形,图10为θ=60°时输出电压和电流波形;图11为频率跟踪后稳态的输出电压和电流波形。



5 结语
由于传统开关管触发电路是由硬件实现脉冲移相控制的,其线路复杂,元件易老化,输出波形易发生不同程度的失真,使触发脉冲对称度受到很大影响。由微处理器构成的控制系统,能在满足精确性的前提下,实时、准确地完成控制任务,利用软件实现移相控制,可以大大改善触发脉冲的对称度,提高信号精度。在此采用DSP来实现功率的PS-PWM控制,通过改变移相角来实现较宽范围内的功率调节,且功率开关器件工作在软开关状态,使得系统效率极大地提高,更具灵活性,运行更加可靠。
上一篇:准谐振反激的原理、应用及参数计算
下一篇:点阵LED驱动器AS1119特性介绍
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 UA748CV
UA748CV






- Power Integrations面向800V汽车应用推出新型宽爬电距离开关IC
- 打破台积电垄断!联电夺下高通先进封装订单
- Ampere 年度展望:2025年重塑IT格局的四大关键趋势
- 存储巨头铠侠正式挂牌上市:首日股价上涨超10%
- Vishay 推出新款精密薄膜MELF电阻,可减少系统元器件数量,节省空间,简化设计并降低成本
- 芯原推出新一代高性能Vitality架构GPU IP系列 支持DirectX 12和先进的计算能力
- NXP 2.5亿美元收购Aviva,但车载SerDes领域依然处于战国时期
- 应对 AI 时代的云工作负载,开发者正加速向 Arm 架构迁移
- 沉浸式体验漫威宇宙,英特尔锐炫显卡为《漫威争锋》提供Day 0支持
- 艾迈斯欧司朗与法雷奥携手革新车辆内饰,打造动态舱内环境




 京公网安备 11010802033920号
京公网安备 11010802033920号