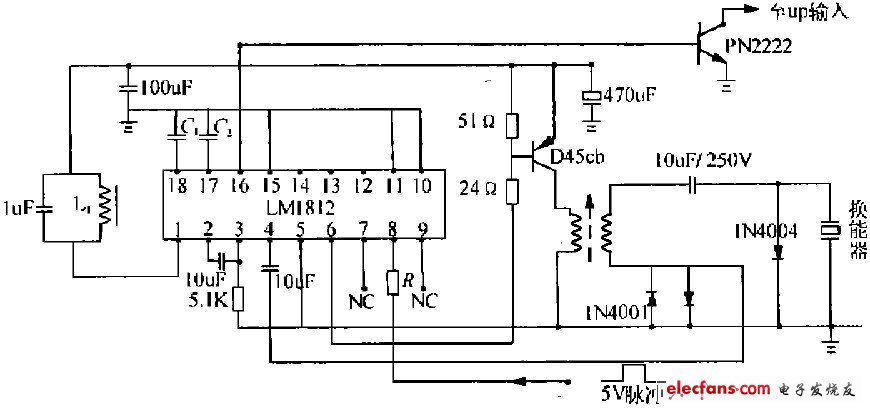
L M I812是设计在 块芯片上的完整的超声波收发机,它应用在各种不同的脉冲回波测距场合。芯片的工作是借助于转换器,通过传送振荡脉冲进行.然后利用同一转换器监听返回的回声。如果收到的回声信号具有足够幅度,则LM1 8 I2探测器将会送出与原来脉冲宽度大致相同的脉冲,距离阻挡物体越近,则收到的返回回声的时间越短。LMISI2构成的超声波换能器驱动和接收电路:
关键字:LMISI2 超声波 换能器 驱动 接收电路
编辑:神话 引用地址:LMISI2构成的超声波换能器驱动和接收电路
上一篇:彩色垂直探鱼仪接收电路
下一篇:UPC1018C构成的超声波接收电路
推荐阅读最新更新时间:2023-10-12 20:46
EMCCD图像传感器CCD97时序驱动电路的设计2

图7 RΦ1, 2, 3 驱动产生电路
它的驱动频率为11 MHz, 输出的上升时间不需要串接电阻调节, 可达10 ns。同理, FPGA_CLKR1, FPΦGA_CLKR2, FPGA_CLKR3 为FPGA 产生的10 MHz的驱动时序, ARM _ROE 为ARM 产生的门控信号。
这里还产生了一路控制行数据丢弃DG( Dump Gate) 门控信号。该信号的摆幅同RΦ1, 2, 3。以上电路的连接均通过Mult isim 仿真, 仿真波形如图8、图9 所示。
图8 IΦ , SΦ 仿真波形
图9 R Φ仿真波形
[模拟电子]

新能源汽车驱动为什么要电机扁线化
作为保时捷品牌首款纯电动跑车,Taycan也具备了多方面的创新性技术,其所搭载的“扁线电机”(Hair-Pin发卡电机)不仅发挥了出色的驱动性能,更是一项将领衔下一代新能源汽车驱动系统的技术。在刚刚落幕的法兰克福车展上,长城汽车及零部件供应商舍弗勒等都展示了各自扁线电机的技术实力。该技术的实力究竟几何?为何业内普遍又将其视为开启新电驱动时代的“钥匙”呢? 1、相比起传统电机所采用的圆形导线,扁线电机采用的是扁平导线。其优势在于电机体积更紧凑、更节约材料、功率更强劲。 2、扁线电机率先由国外车企发起应用,如丰田普锐斯、雪佛兰沃蓝达等。国内应用案例较少,车企尚未进行大规模采用。 3、技术层面,国内扁线电机在设计、制造、原材料等方面
[嵌入式]
高性能、可高压直接驱动MOS的LLC控制器—NCP1396A/B
NCP1396A/B 为NCP1395的改进型。它包括一个最高 500kHZ的压控振荡器,在必需悬浮驱动功能时龅控制模式有很大的灵活性,可执行多个反馈通道。由于采用高压IC 技术,可直接驱动半桥应用的两个MOSFET ,耐压最高达600V。保护特色中可以立即关断,也可以加一时段延迟,加人了布朗输出保护,光耦直接反馈。这对可靠的安全设计很重要,不需要更多的外加电路,可调死区时间防止任何频率下高低边两 M0S-FET的共导。
主要特色
1)高频工作从50~500kHZ。
2)600V 高压浮动驱动器。
3)死区时间从100ns~2μS可调。
4)软起动程序可调节。
5)具有布
[电源管理]
使用差分放大器驱动模数转换器
高速差分放大器让包含高速模数转换器(ADC)的信号链设计更加灵活。差分运放能提供包括增益,阻抗变换和单端到差分转换等的信号调理功能。 ADC一般是固定增益的器件,当输入信号幅值小于满量程的输入范围的时候性能最好。对幅值不足一个最低有效位LSB的信号进行量化时会引入失真。同样对幅值超过满量程的信号也会引入失真。很多ADC会被轻微的过驱动损坏。CLC5526是一个可变增益的差分放大器,当驱动高速ADC的时候能提供给信号增益或者衰减。它在微控制器的控制下能额外获得42dB的动态范围。对于要求低失真,固定增益和直流耦合的应用,LMH6550是理想的选择。类似LMH6550的差分放大器能选择精确的共模工作点。LMH6550和CLC5526都
[模拟电子]
XScale PXA270在Linux下的FPGA设备驱动
引言 Intel公司推出的XScale采用ARM V5TE结构,是Strong ARM的升级换代产品。XScale PXA270处理器最高主频可达624 MHz,加入了Wireless MMX、Intel SpeedStep等新技术,以其高性能、低功耗、多功能等特点在信息家电、工业控制等领域得到了广泛的应用。在嵌入式控制中,“微处理器+FPGA”是一种常用的解决方案。FPGA(现场可编程门阵列)有编程方便、集成度高、速度快等特点,电子设计人员可以通过硬件编程的方法来实现FPGA芯片各种功能的开发。在我们的一个数控平台的研究项目中,采用XScale PXA270作为主CPU,并对其进行FPGA扩展,使其具有插补、电机驱动、信号处理、
[单片机]
基于散列DMA的高速串口驱动设计方案
1 前 言 由于串口在电报通信、工控和数据采集等领域有着广泛的应用,绝大多数嵌入式处理器都内置了通用异步收发器(UART)。UART数据传输主要通过中断或DMA的方式实现。 中断方式是在接收到数据或需要发送数据时产生中断,在中断服务程序中读写UART的缓冲区(FIFO)实现数据传输。由于串口通信速率一般比较低(典型值不超过115 200 bps),大多数嵌入式系统都采用中断方式来传输串口数据。然而,中断服务程序需要占用CPU的时间,而串口速度的提升也必将导致CPU更频繁地响应UART中断,这势必会造成嵌入式系统的性能下降。 DMA数据传输无需CPU的参与,是一种更加高效的数据传输方式。现有的DMA数据传输方案都
[单片机]
LED照明优势无法体现 关键在于低压驱动芯片
LED光源 使用寿命长、节能省电、应用简单方便、使用成本低,因而在家庭照明都将得到海量的应用。LED光源的技术日趋成熟,每瓦发光 流明 迅速增长,促使其逐年递减降价。 LED灯具 的高节能、长寿命、利环保的优越性能获得普遍的公认。
LED 高节能:直流 驱动 ,超低功耗(单管0.03瓦-1 瓦)电 光功率 转换接近100%,相同照明效果比传统光源节能80%以上。 LED长寿命:LED光源被称为长寿灯。固体 冷光源 ,环氧树脂封装,灯体内也没有松动的部分,不存在灯丝发光易烧、热沉积、光衰快等缺点。
LED寿命:使用寿命可达5万到10万小时,比传统光源寿命长10倍以上。
LED利环保:led是
[电源管理]
驱动器和系统如何接地?
工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。 1.如何正确选择伺服电机和步进电机? 答:主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是直流还是交流电源,或电池供电,电压范围。据此以确定电机和配用驱动器或控制器的型号。 2.选择步进电机还是伺服电机系统? 答:其实,选择什么样的电机应根据具体应用情况而定,各有其特点。 3.如何配用
[嵌入式]
 西电-印刷电路板(PCB)设计指南_1-99
西电-印刷电路板(PCB)设计指南_1-99 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号