CAN总线从上个世纪80年代开始,逐渐在汽车电子、轨道交通、医疗电子、工程机械等广泛的工业场合应用。这个“古老”的总线,最让人“不爽”的地方,就是一帧只能传输八字节数据,如果要一次传输更长字节,需要分帧,而选择一种可靠的分帧方法就是使用者一定要注意的。
CAN总线作为汽车电子而生的总线,提出了“优先级自动仲裁”和“短帧快速传输”的控制概念,为了达到“高实时性”的快速控制目标。使用一帧八字节的通讯单元具有了一系列的优点缺点:
一、CAN通讯的优缺点:
优点
(1)8个字节正好是8个字节、4个16位、2个32位、1个64位的变量的存放“容器”。那么用户只要在ID中存放“寄存器地址”,然后通过1帧来“读取”或者“修改”,对应的“数值”,这样比较方便;
(2)短帧提高总线共享速度。任何一个CAN节点发送报文,在发送一帧后,需要重新和其他节点竞争总线,这样只要用户设计适当的发送间隔,就可以保证所有的点“共享”总线,提高总线利用率,也保证每个节点的发送周期大致保证一致。
缺点
(1)长数据传输时数据负载偏低。在多帧发送时,由于每帧发送都要发送CANID,所以实际的CAN数据所占的比例就很低了,以CAN扩展帧为例,其29位ID和64位的数据,导致数据承载只能达到60%。所以在长数据传输时,CAN甚至比不上同样波特率下的RS485/Modbus;
(2)长数据传输分帧丢帧,会导致整包传输失败。当需要一次传输超过8字节数据时,需要分多帧传输,如果其中一帧“丢失”,则会导致整个发送包的无效。这就要求接收节点对每一个分帧进行确认,以保证每一个分帧的到达,而这么做就会大大降低效率;
(3)长数据传输时同步性差。比如要同时输出动作超过8字节的控制命令时,由于每个帧到达有先后,先到的先动作,后到的后动作,就会引起输出的不同步性。
可见CAN总线在当前的主流应用中,主要矛盾集中在其8字节短帧的长数据传输上。因此世界广大科技工作者制定出一系列的改进和改革方法来解决这些缺点。
二、可靠CAN长数据通讯:
升级为CANFD协议提高数据负载率
几年前,梅赛德斯奔驰的工程师们对CAN总线的制定单位CiA(CAN in Automatic)协会提出,奔驰已经将CAN用尽了。因为奔驰的工程师们通过不断优化通讯机制,已经将奔驰的CAN总线利用率提高到90%以上,已经无带宽可用,只能通过网关不断增加新的CAN网络来扩展数据通道。这样导致整车的总线区域越来越多。
车载以太网虽然可以解决数据量的问题,但其布线改变过大,成本上升过多,只适合于网关之间的通讯。所以CiA协议就联合各大车厂,制定出新一代的CANFD协议,以快速升级现有的CAN2.0B。其主要的内容就是将一帧的数据段由8字节提升到64字节,同时可以提升数据段的波特率,以缩短通讯时间。如图1所示。

图 1 CANFD报文提升数据负载率
这样,不需要每8字节就要发一次CANID,即使不提升波特率,也提升了8倍的数据负载率。如果提升了8倍波特率,则可以达到64倍的数据负载率,相当于扩充了64倍带宽。其提升效果非常明显。
采用可靠的分帧协议
成熟的应用层协议都有可靠的分帧协议,比如CANopen,DeviceNET,J1939协议等,总的方针都是“握手”“传输”“确认”“结束”这四个过程循环。这里只介绍CANopen协议中的SDO多帧传输。
发送方(客户端)发送的报文CAN-ID为600h+Node-ID,接收方(服务器)成功接收后,回应CAN-ID为580h+Node-ID的报文。下载协议download protocol 如图2所示。

图2 普通SDO下载协议
上传协议upload protocol 如图3所示。
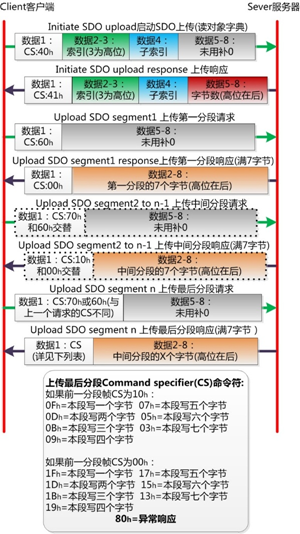
图 3普通SDO上传协议
采用同步传输协议
同步传输,解决的就是实现整个网络的同步传输,如图4所示,就像阅兵分列式上的方阵,所有士兵迈着整齐的步伐行进。这里以CANopen的同步报文为例讲解。

图4同步协议与阅兵分列式
每个节点都以同步报文作为PDO(过程数据的)触发参数,为了保证时间准确性,该同步报文的COB-ID 具有比较高的优先级以及最短的传输时间。 CANopen选用80h作为同步报文的CAN-ID,如图5所示。

图5 同步报文
一般同步报文由NMT(网络管理)主机发出,CAN报文的数据为0字节。但如果一个网络内有2个同步机制,就需要设置不同的同步节拍,比如某些节点按1个同步帧发送1次PDO,其他的节点收到2个同步帧才发送1此PDO,
在同步协议中,有2个约束条件:
同步窗口时间:索引1007h约束了同步帧发送后,从节点发送PDO的时效,即在这个时间内发送的PDO才有效,超过时间的PDO将被丢弃,当同步窗口结束后,开始同时执行动作。
通讯循环周期:索引1006h规定了同步帧的循环周期,就是同步包发送的周期。
CAN总线在诸多爱好者的推动下,不断改进和改革自身,让这个古老的总线焕发出勃勃生机。广州致远电子有限公司,作为CAN总线在国内的重要推广者,CANScope总线综合分析仪已免费标配CANPRO软件,可以解析主流的CANOpen,DeviceNet,J1939协议。

图6 协议解析
 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南 TC52N3448ECTRT
TC52N3448ECTRT

Vishay线上图书馆

- USB转串口模块
- LTC4162IUFD-FSTM 9V 至 35V 2 节 3.2A 充电器的典型应用,具有 PowerPath 和 2A 输入限制
- 5 至 6.5W、5V DC 至 DC 单路输出电源,用于以太网供电
- 用于汽车照明的 21-LED 通用 LED 驱动器
- ZGENPRP0100MDS,基于 ZNEO Z16F 系列 MDS 兼容处理器模块的通用模块化开发系统
- 用于 ADSL 调制解调器的 ±15V 模拟放大
- EXTEND BOARD
- LT1172CN8、1.25A 背光 CCFL 电源的典型应用
- LT1764ET-2.5 3.3 VIN 至 2.5 VOUT LDO 稳压器的典型应用
- L7808A 稳压器的典型应用@ (Vo(min) = Vxx + VBE)






- 首都医科大学王长明:针对癫痫的数字疗法已进入使用阶段
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- 兆易创新GD25/55全系列车规级SPI NOR Flash荣获ISO 26262 ASIL D功能安全认证证书
- 新型IsoVu™ 隔离电流探头:为电流测量带来全新维度
- 英飞凌推出简化电机控制开发的ModusToolbox™电机套件
- 意法半导体IO-Link执行器电路板为工业监控和设备厂商带来一站式参考设计
- Melexis采用无磁芯技术缩小电流感测装置尺寸
- 千丘智能侍淳博:用数字疗法,点亮“孤独症”儿童的光
- 数药智能冯尚:ADHD数字疗法正为儿童“多动症”提供更有效便捷服务
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展
- TI首届低功耗设计大赛之玩转MSP430 FRAM MCU
- 安全的革新,全新的验证方式 下载富士通 《频谱验证解决方案 》白皮书 好礼送!
- 低电平大本营 这些热门研究正在发生 速度解密!
- 邀请好友体验WEBENCH,礼品丰厚你有他也有!
- 有奖直播:Keysight World Tech Day 2024 汽车分论坛|汽车自动驾驶与新能源
- 罗姆有奖直播报名中!解决电源IC困扰的ROHM先进电源技术Nano系列
- 今天下午1点开播!市场上最广泛的光学传感方案组合—艾迈斯欧司朗光学技术论坛
- 新年祝福语 欢乐大竞猜
- 有奖直播 | 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制






 京公网安备 11010802033920号
京公网安备 11010802033920号