LDW (According ISO17361)
1、定义
报警临界线warning threshold
发出报警时车辆在道路上的位置,对应于系统内部设置的报警触发点。
报警临界线设置区域warning threshold placement zone
最早报警线与最迟报警线之间的区域,报警临界线设置于该区域内。
弯道切入curve cutting可导致故意性的车道偏离的驶向弯道内侧的驾驶行为。
中国车道参数(参照GB5768_1999‘Road traffic signs and markings’):
车道宽度:3.0米和3.75米之间.
车道线宽度:10,15 or 20 cm.
异向车道线:4 m(实线) +6 m (空);
同向车道线,:2 m (实线) + 4 m (空) 城市道路; 6m (实线) +9 m (空) 高速公路.
2、示例图


3、系统功能要求及分级


4、测试基础场景
4.1 测试环境条件
采用以下测试环境条件。
a) 测试地点:干燥平坦的沥青或混凝土路面;
b) 测试温度范围:-20℃~ 40℃;
c) 测试路面上的可见车道标识应状态良好,并符合GB5768的规定。
d) 水平能见度应大于1km。
4.2 测试车道条件
测试车道的曲率半径应在表1中相应类型曲率半径最小值的±10%范围内。测试车道应有足够长度以满足最小运行速度的需求(即类型Ⅰ20m/s,类型Ⅱ17m/s),这样车辆才能以0m/s﹤v ≤0.8m/s的偏离速度离开车道。
4.3 测试车辆条件
测试车辆的质量应处于整车整备质量加上驾驶员和测试设备的总质量(驾驶员和测试设备的总质量不超过150kg)与最大允许总质量之间,质量的描述应符合GB/T3730.2-1996的3.2的要求,测试开始后不允许改变测试车辆的条件。
4.4 测试系统安装与设置
车道偏离报警系统的安装与设置应根据制造商提供的设备使用说明进行。对于具有用户可调报警临界线的车道偏离报警系统的测试,每项测试应进行两次,即一次是将报警临界线设置在最早报警线,另一次是将报警临界线设置在最迟报警线。测试开始后不允许改变系统设置。
4.5 测试输出
由数据记录中获取的参数 以下是从数据记录中获取的参数:
a) 报警触发点(时间和(或)空间的);
b) 偏离速度;
c) 车速。
测试设备记录测试过程中的所有报警信息,并从中获取所需参数。

测试场景
Ø场景1:报警产生测试
测试开始时车辆应基本处于车道中央。当车辆进入测试车道跟踪行驶并达到稳定状态后,车辆可向弯道内侧和外侧逐渐偏离。车辆的弯道行驶速度根据表1中的系统分类选取,即Ⅰ型取20m/s~22m/s,Ⅱ型取17m/s~19m/s。车辆应在右转弯和左转弯两种情况下,在两种偏离速度范围(0.0m/s~0.4m/s和0.4m/s~0.8m/s)内,分别左侧和右侧各偏离一次。可组合得到八种偏离情况,如表3和图5所示。
表3

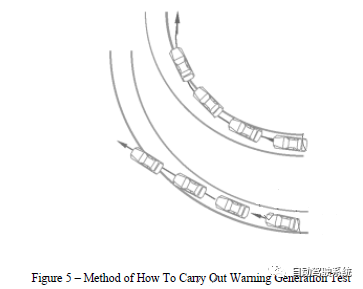
图5报警测试方法

Ø场景2:可重复性测试
可重复性测试应在一段直线路段进行。车辆行驶速度根据表1中的系统分类选取,对于Ⅰ型系统选20m/s~22m/s,Ⅱ型系统选17m/s~19m/s。车辆可沿着车道中央行驶,或者靠近与车辆即将偏离越过车道标识相对的另一侧车道标识行驶。例如,如果将要向车道右侧偏离,则车辆可以沿左侧的车道标识行驶,反之亦然,如图6所示。当车辆按照指定速度沿测试车道跟踪行驶并达到稳定状态后,车辆可向车道左侧和右侧逐渐偏离。当偏离速度为0.1m/s﹤(V1±0.05)≤0.3m/s时,进行两组共八次测试(第一组的四次向左偏离,第二组的四次向右偏离);当偏离速度为0.6m/s﹤(V2±0.05)≤0.8m/s时,进行另外的两组共八次测试(第三组的四次向左偏离,第四组的四次向右偏离),即共需进行16次测试。V1、V2由设备制造商预先选择。测试系统应根据表4所示的偏离速度以组(每组四次测试)为单位顺次进行测试。
表4


图6可重复性测试方法
Ø场景3:虚警测试
测试车道为直道,总长1000m(一段长1000m的直道或两段长500m的直道),当车辆在非报警区域内行驶时,系统应不发出报警,并记录系统报警情况。
测试通过标准:
Ø报警产生测试
在每次测试中,系统应保证车辆在越过最早报警线之后,未越过最迟报警线之前发出报警。
Ø可重复性测试
对于每一测试组,系统报警临界线应始终位于一个0.3m宽的固定区域内。当车辆位于报警临界线设置区域之外时,系统应不发出报警。如果某一个测试组包括4次以上测试,并且均在相应的偏离速度范围内,则仅考虑前4次测试。
Ø虚警测试
当车辆位于左右两条最早报警线之间(即非报警区域)时,系统应不发出报警。

景 1 | 1-1 | Ⅰ型,右转弯左偏离 |
1-2 | Ⅰ型,右转弯右偏离 | |
1-3 | Ⅰ型,左转弯左偏离 | |
1-4 | Ⅰ型,左转弯右偏离 | |
1-5 | Ⅱ型,右转弯左偏离 | |
1-6 | Ⅱ型,右转弯右偏离 | |
1-7 | Ⅱ型,左转弯左偏离 | |
1-8 | Ⅱ型,左转弯右偏离 | |
场 景 2 | 2-1 | Ⅰ型,直道车在中间左偏离 |
2-2 | Ⅰ型,直道车偏左左偏离 | |
2-3 | Ⅰ型,直道车偏右左偏离 | |
2-4 | Ⅰ型,直道车位置任意左偏离 | |
2-5 | Ⅰ型,直道车在中间右偏离 | |
2-6 | Ⅰ型,直道车偏左右偏离 | |
2-7 | Ⅰ型,直道车偏右右偏离 | |
2-8 | Ⅰ型,直道车位置任意右偏离 | |
2-9 | Ⅱ型,直道车在中间左偏离 | |
2-10 | Ⅱ型,直道车偏左左偏离 | |
2-11 | Ⅱ型,直道车偏右左偏离 | |
2-12 | Ⅱ型,直道车位置任意左偏离 | |
2-13 | Ⅱ型,直道车在中间右偏离 | |
2-14 | Ⅱ型,直道车偏左右偏离 | |
2-15 | Ⅱ型,直道车偏右右偏离 | |
2-16 | Ⅱ型,直道车位置任意右偏离 | |
场 景 3 | 3-1 | 一段1000米直道无偏离 |
3-2 | 两端500米直道无偏离 |
上一篇:基于ZYNQ AP SoC的安全驾驶系统设计与实现
下一篇:使用CC430实现的道路急转弯处盲区提示预警系统设计
 Autonomous Vehicles for Safer Driving
Autonomous Vehicles for Safer Driving 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用














 京公网安备 11010802033920号
京公网安备 11010802033920号