MF-TDMA 卫星网络是由地面主站、备用主站、网控中心、众多从站、卫星转发器等单元组成,系统的主要业务是话音、数据、视频,但各卫通站通信能力大小不同,每个地面站作为主叫或被叫,向网控中心站申请卫星信道资源,因此必须对卫星网络资源与信息进行有效管理与调配,使其可以应对各种复杂的突发情况,适应应用任务、网络本身和外部条件的变化,保证卫星网络稳定、可靠、持续和高效运行。
Rational Rose 工具是美国Rational 公司开发的用于分析和设计面向对象系统的强大工具,可以帮助先建模,再进行功能测试,从而保证系统结构合理、运行正常。Rational Rose 工具支持可视化开发测试用例模型,结合卫星网络的的实际情况,主要进行业务建模、分析建模、设计建模,然后完成用例驱动、迭代和增量测试任务。
主要介绍卫星网络中比较重要的几个设计要素的测试方法,并通过仿真建模对网络化业务传输要求的TDMA 技术体制进行探讨研究。
1 网络模型组成及业务流程
1. 1 网络模型
以MF TDMA 方式组网应用时,主站发送TDMA参考信号并作为全网各站的时间参考基准、一个备份主站用于主站出现故障时接替主站的工作。一般业务站以主站为参考,并按照主站下发的时隙表在分配给本站的时隙内发送信息。卫星通信网络的实现模型如图1 所示。

图1 卫星网络半实物仿真网络的架构
网络运行中帧同步设计、呼叫业务量的调整、射频链路功率调整等设计方法是网络高效运行的关键技术。为此建立如下测试模型和测试流程。
测试人员利用序列图取得测试脚本所需的信息,测试过程包括4 个步骤:
①将序列图转换为流程图; ②从流程图识别要测试的路径,首先识别入口——出口路径,这样所有的判定分支都会至少被采用一次,每一条跟踪的路径就成为一个测试用例; ③识别特殊的异常情况,即用于开发测试实例以测试与被测实现相关的异常处理; ④识别要采用特定路径所需要的输入和状态,当满足所有的路径条件时就会沿该路径而行,测试用例定义需要满足路径条件的特定输入和状态。最后确定每个测试实例的预期结果,完成测试包,得到的测试包可以用一个规定脚本语言在一个用户测试驱动程序中实现。
1. 2 MF TDMA 系统定时同步模型
定时是TDMA 系统的一个关键问题,它为系统运行提供时间基准,是初始捕获和同步保持的基础。
初始捕获是指地球站开始发射突发时,保证其能够正确地进入指定的时隙,而不会误入其他时隙造成干扰的过程。
1. 3 申请话音进展模型
建立一个双工的用户模型,既能作为主叫也能作为被叫。当作为主叫时,用户根据加载的业务发出呼叫请求; 而作为被叫时,则需要对主叫作出必要的应答,以保证通话链路的建立. 整个测试流程如下: 终端用户站发送呼叫申请帧并获取信道分配帧,申请成功后则将信道分配包传给用户进程,若申请失败则通知拥护进程失败的信息,这些过程为流程图识别的测试路径。
1. 4 射频及链路模型
射频模型包括上行射频和下行射频2 部分,前者主要是对地面站的发送功率进行处理,后者主要确定误码问题。这里对上行链路做了限制,即申请路径只能传到网控中心; 在下行链路,主要确认卫星模块传来的信号功率是不是到达此链路所连接的射频模块所需要的信噪比,如果是则将其接收,否则予以抛弃。所有的帧传输都要经过一个卫星信道的时延并满足接收站功率控制要求。
为每个站的调制器的突发信噪比都配置一个值,这个值用于传输功率控制。远端站将它们从控制站收到的参考突发的信噪比报告给控制站,TDMA帧头的一个域就是用于这一目的的,控制站调整它的传输功率电平,将信噪比值控制在一个期望的范围内。各远端站也调整它们的上行功率,使得它们的突发在接收时与参考突发有着相同的信噪比。
2 测试模型仿真
2. 1 网络同步参数设置
同步保持调整间隔时间是指为了保持全网的同步,需要对突发发送时刻进行调整的周期。调整的越频繁,各类误差对同步保持的影响就越小,而调整过程本身带来的开销就越大; 反之各类误差对同步保持的影响就越大,而调整过程本身带来的开销就越小。因此系统设计时应折中考虑。
同步保持误差是在一定的同步保持调整周期( 同步保持调整间隔时间) 内,突发发送时刻所能达到的准确度。它与卫星漂移引起的误差、时钟稳定度引起的误差、逻辑电路抖动以及调整精度等因素有关。
2. 2 话音参数设置
系统的网络结构为网状网,系统参数描述如下:
①系统中每站最大支持20 个话音信道; 每个信道的速率为2 400 bps; ②每个站发送时间间隔服从t= 500 s 的指数分布,发送数据包包长服从均值k= 1 240 bit 的泊松分布,总的站数是100 个,信道重发3 次,重发时间服从指数分布; ③卫星延迟时间为0. 27 s;④中央站为1 个网控站,服务速率为9 600 bps; ⑤假定中央站接收到小站的数据包,即为一次呼叫成功; ⑥站的数量逐步增多。其中,接续时延是指一个呼叫从产生到接通,从而准备通话之前的时间。
2. 3 功率调整参数设置
功率调整机制的建立,需要卫星网络各站参数联动响应,为此用Rational Rose 工具建立的特殊测试流程为: 识别要采用特定路径所需要的输入数据和状态,当满足所有的路径条件时就会沿该路径而行,不满足时给出告警并提示可行指数,所有测试用例中定义的数据需要满足路径条件的特定输入数据和状态。在功率调整测试用例中可设置如下参数。
( 1) 信噪比参数设置
在每个站的参数文件中定义3 个参考突发的信噪比值,以达到期望的链路质量:
最小信噪比( Minimum Es/No) 为70;适中信噪比( Moderate Es/No) 为100;最大信噪比( Maximum Es/No) 为130。
另外,在控制站参数文件中定义一个下行链路控制值。这个参数的意义是: 有多少远端站接收控制站突发信号的质量低于期望值才能导致控制站增大发送功率。
( 2) 雨区发射功率调整
如果控制站检测到它不能将功率电平增加到期望值,它将在参考突发中设置一个标志,告诉各远端站。远端站跟着冻结自己的功率电平。它们从本站的参数文件中读取最新功率电平值。[page]
( 3) 更新、整理、归类
如果控制站处于雨区,参考突发的上行传输衰减将会增加,各远端站将报告接收质量变差。由于当地情况不同,有些站的信号质量会低于最小信噪比(Minimum Es/ No) 的阈值,当接收信号质量差的站数超过控制站下行链路控制参数值( Down LinkPower Control) 时,控制站在功率控制机制的控制下增加发射功率电平。当下行链路控制值较小时,控制站的反应会早些,功率电平会马上增加。
远端站汇报实际接收的信噪比。“ 最大、适中与最小信噪比”作为控制站的参数,控制站比较报上来的值和控制参数,将值归类。“最大、适中与最小信噪比”作为该站的参数,由远端站自己归类,向控制站报告结果。
3 系统测试
3. 1 同步系统测试结果
通过建立的测试模型,对网络同步系统各参数进行测试得到如下结果: 帧长度的选取首先要考虑卫星链路的传输时延和话音业务对传输时延的要求。话音业务传输时延一般要求在400 ms 以内,卫星链路的传输时延大约为270 ms,同时考虑到传输设备的处理时延,帧长一般不超过110 ms,综合考虑各种因素的影响不小于80 ms 为宜。
为了解决网络规模与主载波帧效率间的矛盾,系统引入了超帧结构。但超帧结构的引入使各站占用申请时隙的机会从一帧一次变成了一超帧一次,根据对话音业务呼叫建立时间限制的仿真,最大超帧长度定为16 帧。
图2 同步保持误差数据统计卫星漂移的典型速率为2. 8 m/ s,系统要求的时钟稳定度为1 ( 10- 8/ 日,典型的同步保持调整间隔时间为一个超帧,以最长超帧16 帧,最长帧长110ms进行分析,仿真同步保持误差小于10 s,保证网络的同步运行。同步误差仿真数据如图2所示。可以看出仿真测试结果满足系统要求。

图2 同步保持误差数据统计
3. 2 业务接入系统测试结果
系统提供话音、数据和视频3 种业务接入,采用MF TDMA 虚路由技术体制,可以组成全网状网。
各站间平均业务互通量为1 Mbps,采取相应的流量控制、排队和调度机制,通过对网络话音业务大话务量的测试仿真,系统的平均呼叫成功率统计如图3 所示,呼叫接续时延统计如图4 所示。
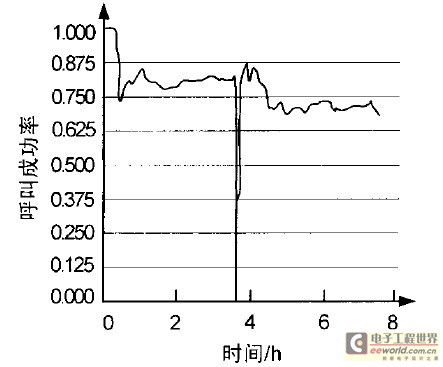
图3 系统的平均呼叫成功率

图4 系统的平均接续时延
在上述业务背景下,系统的呼叫成功率在87%左右,而平均接续时延维持在1. 1 s 左右,这个结果满足网络用户服务质量要求。
4 结束语
使用Rational Rose 工具设计的模型,测试人员可以根据MF TDMA 卫星网络的特点设计出很多测试用例,获得大量数据,很方便地捕获设计缺陷,从而能以较小的代价尽可能多地找出网络设计中存在的各种缺陷,有效指导系统设计,使网络得到最佳的配置。
关键字:MF-TDMA 卫星通信 网络仿真测试
引用地址:MF-TDMA卫星通信网络仿真测试研究
Rational Rose 工具是美国Rational 公司开发的用于分析和设计面向对象系统的强大工具,可以帮助先建模,再进行功能测试,从而保证系统结构合理、运行正常。Rational Rose 工具支持可视化开发测试用例模型,结合卫星网络的的实际情况,主要进行业务建模、分析建模、设计建模,然后完成用例驱动、迭代和增量测试任务。
主要介绍卫星网络中比较重要的几个设计要素的测试方法,并通过仿真建模对网络化业务传输要求的TDMA 技术体制进行探讨研究。
1 网络模型组成及业务流程
1. 1 网络模型
以MF TDMA 方式组网应用时,主站发送TDMA参考信号并作为全网各站的时间参考基准、一个备份主站用于主站出现故障时接替主站的工作。一般业务站以主站为参考,并按照主站下发的时隙表在分配给本站的时隙内发送信息。卫星通信网络的实现模型如图1 所示。

图1 卫星网络半实物仿真网络的架构
网络运行中帧同步设计、呼叫业务量的调整、射频链路功率调整等设计方法是网络高效运行的关键技术。为此建立如下测试模型和测试流程。
测试人员利用序列图取得测试脚本所需的信息,测试过程包括4 个步骤:
①将序列图转换为流程图; ②从流程图识别要测试的路径,首先识别入口——出口路径,这样所有的判定分支都会至少被采用一次,每一条跟踪的路径就成为一个测试用例; ③识别特殊的异常情况,即用于开发测试实例以测试与被测实现相关的异常处理; ④识别要采用特定路径所需要的输入和状态,当满足所有的路径条件时就会沿该路径而行,测试用例定义需要满足路径条件的特定输入和状态。最后确定每个测试实例的预期结果,完成测试包,得到的测试包可以用一个规定脚本语言在一个用户测试驱动程序中实现。
1. 2 MF TDMA 系统定时同步模型
定时是TDMA 系统的一个关键问题,它为系统运行提供时间基准,是初始捕获和同步保持的基础。
初始捕获是指地球站开始发射突发时,保证其能够正确地进入指定的时隙,而不会误入其他时隙造成干扰的过程。
1. 3 申请话音进展模型
建立一个双工的用户模型,既能作为主叫也能作为被叫。当作为主叫时,用户根据加载的业务发出呼叫请求; 而作为被叫时,则需要对主叫作出必要的应答,以保证通话链路的建立. 整个测试流程如下: 终端用户站发送呼叫申请帧并获取信道分配帧,申请成功后则将信道分配包传给用户进程,若申请失败则通知拥护进程失败的信息,这些过程为流程图识别的测试路径。
1. 4 射频及链路模型
射频模型包括上行射频和下行射频2 部分,前者主要是对地面站的发送功率进行处理,后者主要确定误码问题。这里对上行链路做了限制,即申请路径只能传到网控中心; 在下行链路,主要确认卫星模块传来的信号功率是不是到达此链路所连接的射频模块所需要的信噪比,如果是则将其接收,否则予以抛弃。所有的帧传输都要经过一个卫星信道的时延并满足接收站功率控制要求。
为每个站的调制器的突发信噪比都配置一个值,这个值用于传输功率控制。远端站将它们从控制站收到的参考突发的信噪比报告给控制站,TDMA帧头的一个域就是用于这一目的的,控制站调整它的传输功率电平,将信噪比值控制在一个期望的范围内。各远端站也调整它们的上行功率,使得它们的突发在接收时与参考突发有着相同的信噪比。
2 测试模型仿真
2. 1 网络同步参数设置
同步保持调整间隔时间是指为了保持全网的同步,需要对突发发送时刻进行调整的周期。调整的越频繁,各类误差对同步保持的影响就越小,而调整过程本身带来的开销就越大; 反之各类误差对同步保持的影响就越大,而调整过程本身带来的开销就越小。因此系统设计时应折中考虑。
同步保持误差是在一定的同步保持调整周期( 同步保持调整间隔时间) 内,突发发送时刻所能达到的准确度。它与卫星漂移引起的误差、时钟稳定度引起的误差、逻辑电路抖动以及调整精度等因素有关。
2. 2 话音参数设置
系统的网络结构为网状网,系统参数描述如下:
①系统中每站最大支持20 个话音信道; 每个信道的速率为2 400 bps; ②每个站发送时间间隔服从t= 500 s 的指数分布,发送数据包包长服从均值k= 1 240 bit 的泊松分布,总的站数是100 个,信道重发3 次,重发时间服从指数分布; ③卫星延迟时间为0. 27 s;④中央站为1 个网控站,服务速率为9 600 bps; ⑤假定中央站接收到小站的数据包,即为一次呼叫成功; ⑥站的数量逐步增多。其中,接续时延是指一个呼叫从产生到接通,从而准备通话之前的时间。
2. 3 功率调整参数设置
功率调整机制的建立,需要卫星网络各站参数联动响应,为此用Rational Rose 工具建立的特殊测试流程为: 识别要采用特定路径所需要的输入数据和状态,当满足所有的路径条件时就会沿该路径而行,不满足时给出告警并提示可行指数,所有测试用例中定义的数据需要满足路径条件的特定输入数据和状态。在功率调整测试用例中可设置如下参数。
( 1) 信噪比参数设置
在每个站的参数文件中定义3 个参考突发的信噪比值,以达到期望的链路质量:
最小信噪比( Minimum Es/No) 为70;适中信噪比( Moderate Es/No) 为100;最大信噪比( Maximum Es/No) 为130。
另外,在控制站参数文件中定义一个下行链路控制值。这个参数的意义是: 有多少远端站接收控制站突发信号的质量低于期望值才能导致控制站增大发送功率。
( 2) 雨区发射功率调整
如果控制站检测到它不能将功率电平增加到期望值,它将在参考突发中设置一个标志,告诉各远端站。远端站跟着冻结自己的功率电平。它们从本站的参数文件中读取最新功率电平值。[page]
( 3) 更新、整理、归类
如果控制站处于雨区,参考突发的上行传输衰减将会增加,各远端站将报告接收质量变差。由于当地情况不同,有些站的信号质量会低于最小信噪比(Minimum Es/ No) 的阈值,当接收信号质量差的站数超过控制站下行链路控制参数值( Down LinkPower Control) 时,控制站在功率控制机制的控制下增加发射功率电平。当下行链路控制值较小时,控制站的反应会早些,功率电平会马上增加。
远端站汇报实际接收的信噪比。“ 最大、适中与最小信噪比”作为控制站的参数,控制站比较报上来的值和控制参数,将值归类。“最大、适中与最小信噪比”作为该站的参数,由远端站自己归类,向控制站报告结果。
3 系统测试
3. 1 同步系统测试结果
通过建立的测试模型,对网络同步系统各参数进行测试得到如下结果: 帧长度的选取首先要考虑卫星链路的传输时延和话音业务对传输时延的要求。话音业务传输时延一般要求在400 ms 以内,卫星链路的传输时延大约为270 ms,同时考虑到传输设备的处理时延,帧长一般不超过110 ms,综合考虑各种因素的影响不小于80 ms 为宜。
为了解决网络规模与主载波帧效率间的矛盾,系统引入了超帧结构。但超帧结构的引入使各站占用申请时隙的机会从一帧一次变成了一超帧一次,根据对话音业务呼叫建立时间限制的仿真,最大超帧长度定为16 帧。
图2 同步保持误差数据统计卫星漂移的典型速率为2. 8 m/ s,系统要求的时钟稳定度为1 ( 10- 8/ 日,典型的同步保持调整间隔时间为一个超帧,以最长超帧16 帧,最长帧长110ms进行分析,仿真同步保持误差小于10 s,保证网络的同步运行。同步误差仿真数据如图2所示。可以看出仿真测试结果满足系统要求。

图2 同步保持误差数据统计
3. 2 业务接入系统测试结果
系统提供话音、数据和视频3 种业务接入,采用MF TDMA 虚路由技术体制,可以组成全网状网。
各站间平均业务互通量为1 Mbps,采取相应的流量控制、排队和调度机制,通过对网络话音业务大话务量的测试仿真,系统的平均呼叫成功率统计如图3 所示,呼叫接续时延统计如图4 所示。

图3 系统的平均呼叫成功率

图4 系统的平均接续时延
在上述业务背景下,系统的呼叫成功率在87%左右,而平均接续时延维持在1. 1 s 左右,这个结果满足网络用户服务质量要求。
4 结束语
使用Rational Rose 工具设计的模型,测试人员可以根据MF TDMA 卫星网络的特点设计出很多测试用例,获得大量数据,很方便地捕获设计缺陷,从而能以较小的代价尽可能多地找出网络设计中存在的各种缺陷,有效指导系统设计,使网络得到最佳的配置。
上一篇:UHF频段RFID近场天线的阻抗测量方法
下一篇:用于无线网络安装维护的测试仪表
推荐阅读最新更新时间:2024-03-30 22:51
高通芯片即将解锁卫星通信功能 安卓手机翻身机会来了
高通公司(Qualcomm Inc. )周四表示,该芯片制造商已与卫星通讯公司铱卫星(Iridium)合作,在运行谷歌安卓操作系统的高端智能手机上提供基于卫星的短信服务。 两家公司表示,原理上这项功能与苹果的“紧急救助SOS”类似,但能够允许用户向任何人发送消息。几个月前,苹果公司也推出了类似的功能,允许iPhone 14在美国和加拿大等国家通过卫星发送紧急信息。 这项基于卫星的双向消息传递解决方案被称为“Snapdragon Satellite”。高通表示,骁龙8 Gen 2移动平台将内置对使用卫星连接的消息传递支持,使用该技术的智能手机将于2023年下半年随着一系列新机型一同上市。 据悉,Snapdragon Sa
[手机便携]
一种低轮廓车载卫星通信天线的跟踪设计
在车载卫星通信中,由于低轮廓车载天线具有良好的隐蔽性和使用性,应用前景较为广泛。但要实现性价比达到最优,天线跟踪控制器的设计是关键技术之一。在脱离航向引导信息的情况下,要实现车载天线稳定跟踪的控制系统难度较大,提出一种新的跟踪控制策略,使这一问题得到解决。
1 系统组成
天线稳定跟踪控制系统主要由跟踪接收器、控制器、驱动器以及惯性器件组成。跟踪接收器主要提供卫星信标的AGC电平值;控制器主要提供操作和显示接口以及完成控制策略的实施;驱动器主要完成功率放大和控制电机的旋转;轴角编码器主要提供天线方位及俯仰的实时角度;惯性器件主要提供天线载体的扰动信息。天线控制系统组成如图1所示。
2 跟踪控制策略
[嵌入式]
我国成功发射全球首颗可持续发展科学卫星

11月5日10时19分,我国在太原卫星发射中心用长征六号运载火箭将可持续发展科学卫星1号(SDGSAT-1)发射升空,卫星顺利进入预定轨道,发射任务取得圆满成功。 太原卫星发射中心 郑斌供图 SDGSAT-1是全球首颗专门服务联合国2030年可持续发展议程(以下简称“2030年议程”)的科学卫星,也是中国科学院首颗地球科学卫星。该卫星由中国科学院“地球大数据科学工程”先导专项研制,是可持续发展大数据国际研究中心(CBAS)规划的首发星。 针对全球可持续发展目标(SDGs)监测、评估和科学研究的需求,SDGSAT-1搭载了热红外、微光和多谱段成像仪三个有效载荷,通过三个载荷全天时协同观测,旨在实现“人类活动痕迹”的精细刻
[网络通信]

一种低轮廓车载卫星通信天线的跟踪设计
在 车载卫星 通信中,由于低轮廓车载天线具有良好的隐蔽性和使用性,应用前景较为广泛。但要实现性价比达到最优,天线跟踪控制器的设计是关键技术之一。在脱离航向引导信息的情况下,要实现车载天线稳定跟踪的控制系统难度较大,提出一种新的跟踪控制策略,使这一问题得到解决。 1 系统组成 天线稳定跟踪控制系统主要由跟踪接收器、控制器、驱动器以及惯性器件组成。跟踪接收器主要提供卫星信标的 AGC 电平值;控制器主要提供操作和显示接口以及完成控制策略的实施;驱动器主要完成功率放大和控制电机的旋转;轴角编码器主要提供天线方位及俯仰的实时角度;惯性器件主要提供天线载体的扰动信息。天线控制系统组成如图 1 所示。
[汽车电子]
中国移动多媒体广播CMMB介绍
一、什么是CMMB CMMB是英文China Mobile Multimedia Broadcasting (中国移动多媒体广播)的简称。它是国内自主研发的第一套面向手机、PDA、MP3、MP4、数码相机、笔记本电脑多种移动终端的系统,利用S波段卫星信号实现“天地”一体覆盖、全国漫游,支持25套电视节目和30套广播节目,2006年10月24日,国家广电总局正式颁布了中国移动多媒体广播(俗称手机电视)行业标准,确定采用我国自主研发的移动多媒体广播行业标准。 中国移动多媒体广播系统(简称CMMB)行业标准,规定了在广播业务频率范围内,移动多媒体广播系统广播信道传输信号的帧结构、信道编码和调制,该标准适用于30MHz到3000MHz
[嵌入式]
- 热门资源推荐
- 热门放大器推荐
-
 移动通信轻松入门
移动通信轻松入门 - 卫星通信工程 Satellite Communications Systems Engineering - Atmospheric Effects, Satellite Link Design and
- 卫星通信系统 Satellite Communications Systems : Systems, Techniques and Technology
- 仿人机器人建模与控制 (融亦鸣,朴松昊,冷晓琨)
-
 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用 - 东芝1200V SIC SBD “TRSxxx120Hx系列” 助力工业电源设备高效
- 晶体振荡器设计与温度补偿
- ADS信号完整性仿真与实战
 移动通信轻松入门
移动通信轻松入门 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号