1.概述
自电机工程诞生以来,三相交流马达一直是工业领域的主力。它们可靠、高效、费效比高,需要少量维修或根本不需要维修。此外,交流马达(如感应马达和磁阻马达)无需与转子的电气连接,因此很容易实现阻燃,用于危险环境(如矿山)。
为了提供适当的交流马达速度控制,必须为马达提供三相电源,其电压和频率可以变化。这种电源将在定子中形成一个变速旋转磁场,使得转子按照所需的速度旋转,且滑动很小,如图1 所示。这个交流马达驱动器可以高效提供从零速到全速的全转矩,如果需要的话,还可以超速,而且通过改变相位旋转,可以很容易使马达双向运转。具有这些特点的驱动器称作脉宽调制马达驱动器。
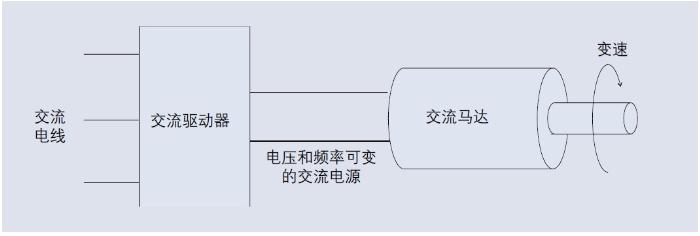
交流马达驱动系统示意图
脉宽调制驱动器可以生成复杂波形,如在到马达的输出上,以及到驱动器的电源上。本博文将分两部分,探讨马达驱动器的电气测量话题。
2. 对脉宽调制马达驱动器的测量
表1 给出了脉宽调制马达驱动器的典型测量。
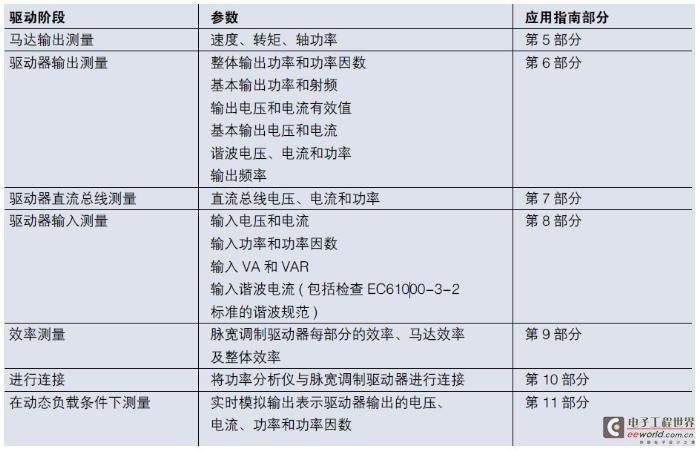
表1. 常见的脉宽调制马达驱动器测量
3. 马达输出测量
图1 说明,通过在马达输出轴安装转速和转矩传感器,可以对马达输出进行测量。
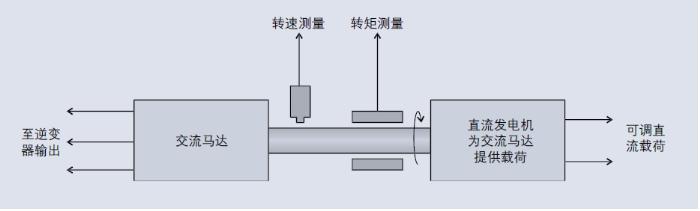
图1. 马达输出测量
3.1 转矩和转速传感器
转矩和转速传感器生成的电信号与转矩和转速成正比。通过测量这些信号,可以确定马达的转速和转矩,从这些测量结果中可以计算马达输出功率。
3.2 转矩
马达转矩是在其输出轴上形成的旋转力,它是一个扭力,其单位是牛顿米(Nm) 或英尺磅(1 英尺磅 =1.3558 Nm)。对于小型马达而言,其转矩额定值低于1 Nm;对于大型马达而言,其转矩额定值达到几千Nm。
通过旋转应变计以及利用固定接近、磁致伸缩和磁弹性传感器,可以测量转矩。这些传感器都是温度敏感型的。旋转传感器必须安装在转轴上,由于空间受限,这并非总能行得通。
为测量转矩,应变计往往直接安装在转轴上。由于转轴旋转,转矩传感器必须通过滑环、无线通信或电感耦合与外边世界耦合。
3.3 转速
马达转速通常以每分钟转速(RPM) 来描述,即它在1分钟内沿固定轴旋转的完整圈数。
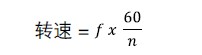
转速传感器输出可能是一个与转速成正比的模拟电压。更普遍的是,转速传感器输出是一个由马达转轴上圆盘生成的TTL 脉冲。通过测量TTL 信号频率,并应用比例因数,可以确定马达转速。
例如,如果转盘每转一圈生成n 个脉冲,那么每分钟转速(RPM) 可以计算为:
3.4 实现转矩和转速测量与电气测量相结合
为了确定马达和驱动器组合的效率,必须考虑系统的电气输入以及在马达输出端生成的机械功率。马达输出功率是转矩和转速的乘积:
马达输出功率(W)= 转矩(Nm)× 转速( 弧度/ 秒)
= 转矩(Nm)× 转速(RPM)×
注意:1ft-lb=1.3558Nm( 牛顿米)
1HP=745.7W
通过以下公式,可以计算系统效率:
为了进行这些测量,PA4000 包括传感器输入端,用于连接转矩和转速传感器。通过测量驱动器输入端消耗的电力、以及马达输出端的转矩和转速,使用一台仪器就可以测量出系统效率。
4. 驱动器输出测量
脉宽调制驱动器的输出波形非常复杂,由一系列高频分量( 因载波) 和低频分量( 因基波) 组合而成。
对大多数功率分析仪来说,这带来的问题是:如果在高频测量,那么波形中的低频信息将丢失;如果滤除脉宽调制波形在低频测量,那么高频数据将丢失。这个难题的出现是因为在低频对波形进行调制。因此,高频测量( 如总电压有效值、总功率等) 必须在高频处进行,但必须超出输出波形低频分量的整数倍。
泰克PA4000 功率分析仪利用脉宽调制输出测量的特殊工作模式克服了这个难题。它对数据进行高速采样,并实时计算总体数量,包括所有谐波和载波分量。与此同时,对采样数据进行数字化滤波,提供低频测量,如输出频率的基波分量和测量。
 图2. 高精度PA4000 测量技术
图2. 高精度PA4000 测量技术
除了从同一测量中获得低频和高频结构外,该技术允许高频测量与低频信号同步,这是提供精确和稳定的高频测量结果的唯一方法。[page]
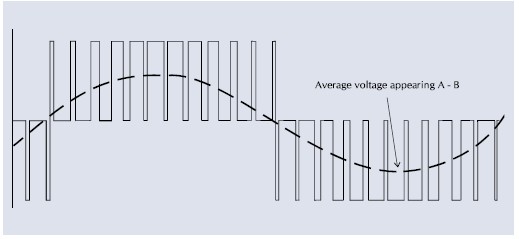 图3. 测得的一个马达绕组两端的净电压
图3. 测得的一个马达绕组两端的净电压
根据测量的输出频率范围,滤波器的选择方案有3 种,参见表2。
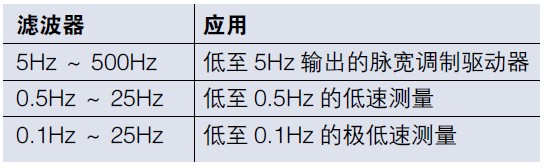 表2. 脉宽调制马达驱动器系统内不同频率范围应用的滤波器
表2. 脉宽调制马达驱动器系统内不同频率范围应用的滤波器
滤波器的选择并不影响较高频率分量的测量,因为这些测量是通过未经过滤的数据进行的。不过,为了优化低频测量结果,您应当为应用选择正确的滤波器。
5.使用PA4000 示波器测量驱动器输出
该仪器通过三相三线配置连接至输出。( 又称作两表法。关于两表法的更多信息,请参见应用指南:三相测量原理。) 对于输出电流高达30A 的脉宽调制驱动器,PA4000 可以通过其内部电流分流器,直接与驱动器输出相连,如图4 所示。
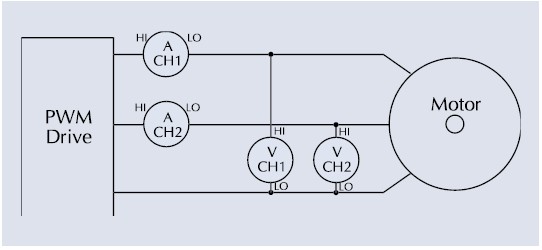 图4. PA4000A 输出测量
图4. PA4000A 输出测量
对于输出电流超过30 A 的脉宽调制驱动器,您可以使用外部电流传感器或外部电流分流器。泰克公司提供多种固定核心电流传感器,最高电流达1000 A。这些传感器包括电缆,实现与PA4000 的快速连接,并利用仪器的15 V 直流电源。当PA4000 功率分析仪与外部分流器一起使用时,您可以将分流器与外部分流电压输入相连。这些输入可以测量从X V 到Y V 的分流输出。对于电流传感器和外部分流器,重要的是,记住正确设置缩放比例。
特别是对于低电流驱动器, 如果可能, 应当将PA4000 直接与脉宽调制输出端相连。这是因为,尽管交流电流变压器和霍尔效应电流传感器在较高电流时提供良好的精度,但对于几安培的较低电流,其结果精度往往较差。
尽管在脉宽调制驱动器输出端出现极高的共模电压,为了从电流分流器得到优异的结果,PA4000 输入电路已经优化。分流器两端电压可能只有几毫伏,但分流器电势相对于接地端上下波动幅度高达数百伏,每微秒高达数千伏。
虽然采用两表法时,PA4000 只有两个通道用于测量,但该仪器将以矢量方式计算和显示第三条(非测量)线路的电流值。这将为权衡负载提供有价值的检查。此外,由于两表法不需要分析仪的第三个通道,它可以用作独立的测量通道,如测量脉宽调制驱动器内的直流总线,详见第7 部分介绍。
一旦分析仪进行连接和配置完毕,它将利用选定的滤波器测量驱动器输出功率。如果PA4000 测量频率有困难,应确保已经指定正确的滤波器频率范围。
注意,Vrms、Arms 和功率数字是通过预过滤值测得的,因此包括所有的高频分量,其中基波值只考虑对马达有用功的贡献。电压有效值与基波电压存在显著差异是很正常的。通常,在电流和功率之间的差异较小,因为感应马达对电流进行了过滤。
通过SUM 通道读取的总功率和基波功率之间的差异,可以估算高频损耗。这代表脉宽调制驱动器提供的电力,这部分电力对机械输出功率没有贡献,因此增加了马达的热量:
高频损耗= 总功率 - 基波功率
当进行脉宽调制驱动器比较时,这是非常有意义的测量。
6. 驱动器直流总线测量
虽然脉宽调制驱动器输入和输出之间的连接称为直流总线,但这个总线上的电压和电流远非纯直流,因此,在进行所需的测量时必须小心谨慎。
直流总线测量最好在存储电容器输入端进行,如图5所示,因为从本质上讲,这里的电流是来自交流电源的低频电容器充电脉冲,是从逆变器吸收的高频电流脉冲中释放出来的。
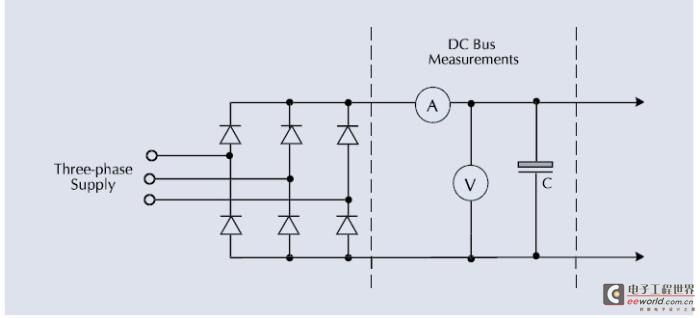 图5. 设置直流总线测量
图5. 设置直流总线测量
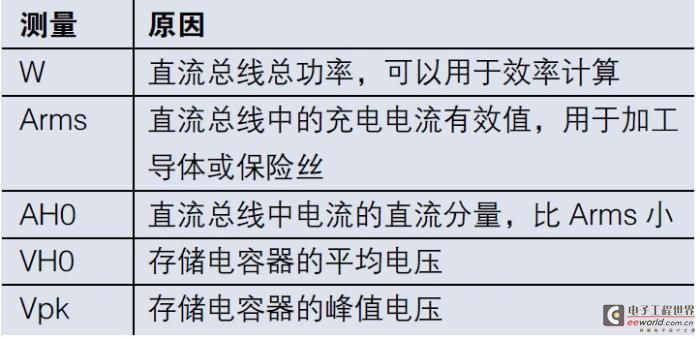
表3. 直流总线关键测量参数
如果独立进行直流总线测量,可以利用分析仪的CH1( 通道1)。不过,直流总线测量往往与驱动器输入或输出的三相二线测量一起进行。在这种情况下,应当使用剩余独立运行通道中某个通道对直流总线进行测量。
例如,将CH1 和CH2 连接,进行输入或输出测量。CH3 与直流总线相连,如图5 所示。使用F[7] 选择脉宽调制马达驱动器输入或输出模式,并启动独立的CH3。[page]
7. 驱动器输入测量
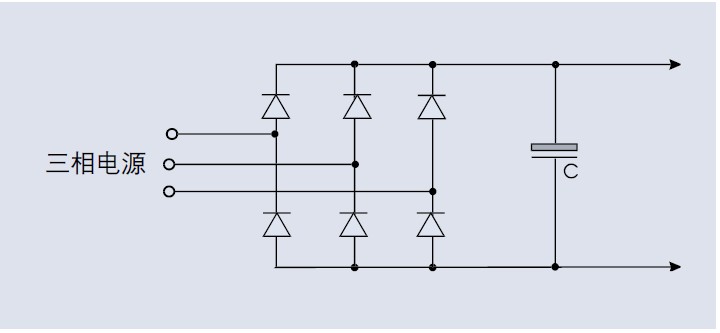
从本质上讲,大多数脉宽调制马达驱动器输入电路是三相二极管整流桥,并包含电容滤波器,如图6 所示。
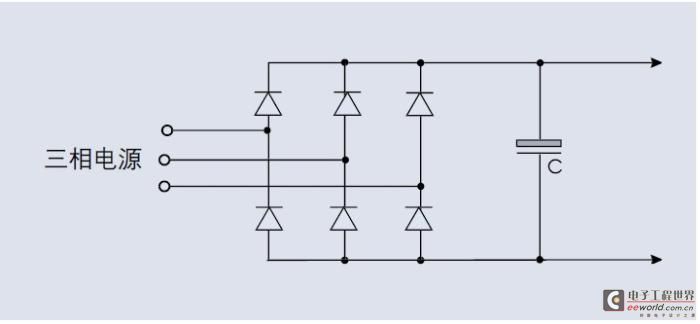 图6. 脉宽调制驱动器的输入整流器和滤波器级
图6. 脉宽调制驱动器的输入整流器和滤波器级
每个输入相的电流波形由为存储电容器充电的脉冲组成。图7 给出某相的电流波形,它包括电源频率的基波分量以及大量谐波分量。
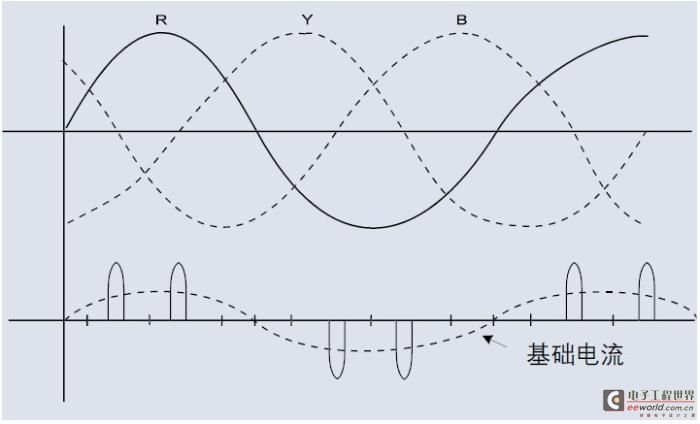
图7. 脉宽调制驱动器输入端电压和电流波形
如果驱动器的逆变器部分为输入电路提供一个恒流负载,那么每相的输入电流将是一个振幅恒定的失真波形,如图7 和图8 所示。
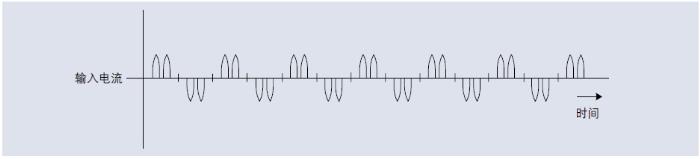
图8. 未经调制的输入电流波形
遗憾的是,脉宽调制驱动器的逆变器部分可能不向输入电路提供恒流负载;在这种情况下,从电容器吸收电流的负载电流将受到输出频率分量的影响。这意味着,来自交流电源的电流在工频频率是复杂的、失真的电流波形,它由驱动器频率进行调制。图9 给出其波形。调制可能严重影响测量,特别是在低驱动速率,不过,利用扩展的测量区间(为驱动器输出波形周期整数倍),可以解决这个问题。
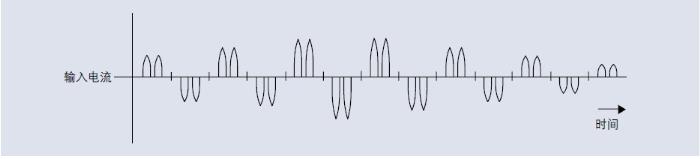
图9. 在输出频率处进行调制的输入电流波形
PA4000 支持脉宽调制驱动器输入功率的精密测量,即使马达处于低频时。输入功率测量与交流工频同步,但通过调节显示屏更新速率及均值设置,可以扩展测量区间。

表4. 选择显示屏更新时间和均值,把驱动器输出频率对驱动器输入功率测量的影响降到最小
对于超过20 Hz 的输出频率,PA4000 的默认设置通常将给出稳定结果。默认设置是:
显示屏更新速率:0.5 s
平均:10
当输出频率在5 Hz ~ 20 Hz 之间时,将均值设置为10,以改进稳定度;对显示屏更新时间进行设置,使之包括测得的脉宽调制输出周期(1/f) 的整数倍。根据经验法则,应提供10 个周期。
例如:
输出频率 = 5.5 Hz
显示屏更新速率 = 10/(5.5 Hz)= 1.8 s
对于低于5 Hz 的输出频率,使用最长的显示屏更新速率(2 s),平均为10。
例如,对单相驱动器进行测量时,如果读数太大,可以将均值设置为10 以上,以帮助使测量稳定。
分析仪通过三相三线配置进行连接,如图10 所示( 即所谓的两表法,关于利用n-1 台功率表可以测量通过n 条线路向系统提供电源的证明,请参见应用指南:三相测量原理)。
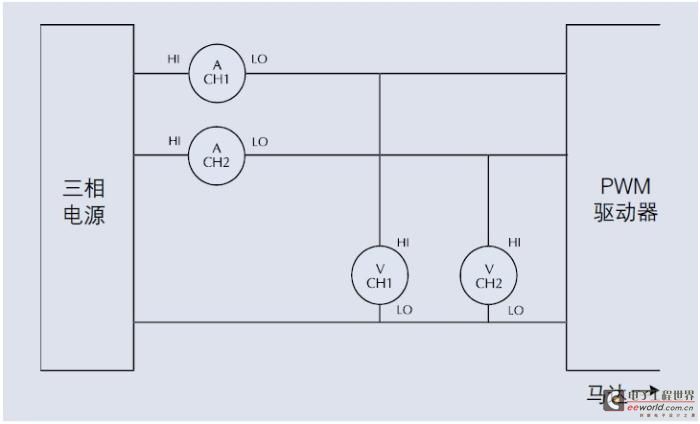
图10. 三相三线连接
在这个线路配置中,可能使用分析仪的第三通道和第四通道,以测量驱动器输出或驱动器内的直流总线。
关键字:脉宽调制 PWM 马达驱动器
引用地址:脉宽调制(PWM) 马达驱动器电源的测试分析(上)
自电机工程诞生以来,三相交流马达一直是工业领域的主力。它们可靠、高效、费效比高,需要少量维修或根本不需要维修。此外,交流马达(如感应马达和磁阻马达)无需与转子的电气连接,因此很容易实现阻燃,用于危险环境(如矿山)。
为了提供适当的交流马达速度控制,必须为马达提供三相电源,其电压和频率可以变化。这种电源将在定子中形成一个变速旋转磁场,使得转子按照所需的速度旋转,且滑动很小,如图1 所示。这个交流马达驱动器可以高效提供从零速到全速的全转矩,如果需要的话,还可以超速,而且通过改变相位旋转,可以很容易使马达双向运转。具有这些特点的驱动器称作脉宽调制马达驱动器。
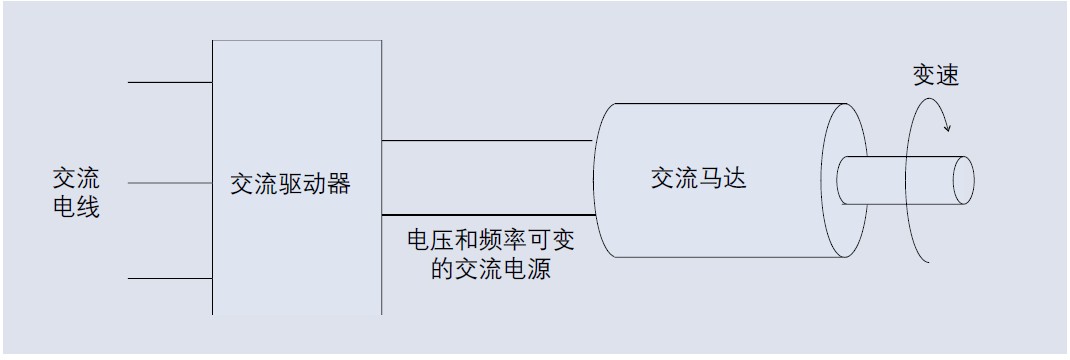
交流马达驱动系统示意图
脉宽调制驱动器可以生成复杂波形,如在到马达的输出上,以及到驱动器的电源上。本博文将分两部分,探讨马达驱动器的电气测量话题。
2. 对脉宽调制马达驱动器的测量
表1 给出了脉宽调制马达驱动器的典型测量。
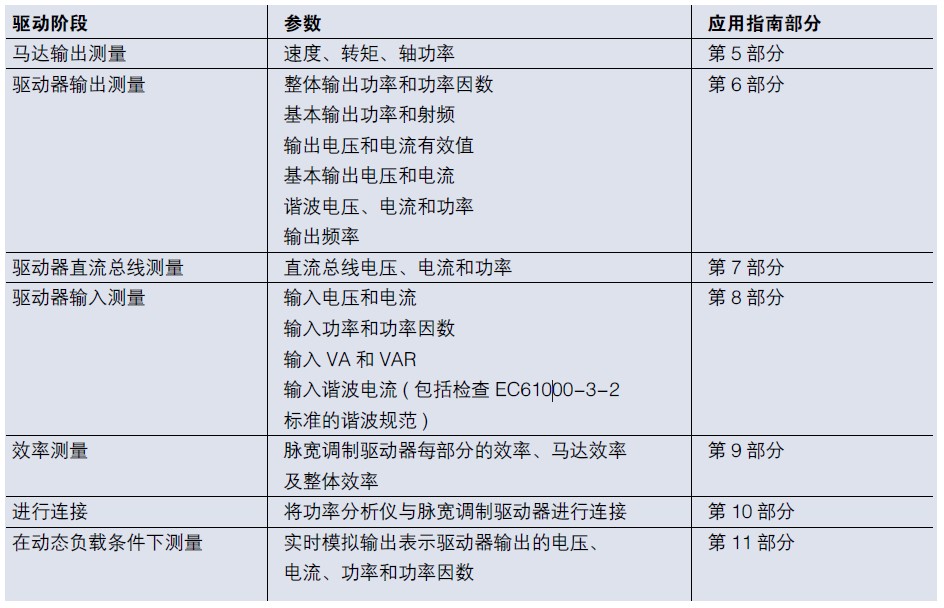
表1. 常见的脉宽调制马达驱动器测量
3. 马达输出测量
图1 说明,通过在马达输出轴安装转速和转矩传感器,可以对马达输出进行测量。

图1. 马达输出测量
3.1 转矩和转速传感器
转矩和转速传感器生成的电信号与转矩和转速成正比。通过测量这些信号,可以确定马达的转速和转矩,从这些测量结果中可以计算马达输出功率。
3.2 转矩
马达转矩是在其输出轴上形成的旋转力,它是一个扭力,其单位是牛顿米(Nm) 或英尺磅(1 英尺磅 =1.3558 Nm)。对于小型马达而言,其转矩额定值低于1 Nm;对于大型马达而言,其转矩额定值达到几千Nm。
通过旋转应变计以及利用固定接近、磁致伸缩和磁弹性传感器,可以测量转矩。这些传感器都是温度敏感型的。旋转传感器必须安装在转轴上,由于空间受限,这并非总能行得通。
为测量转矩,应变计往往直接安装在转轴上。由于转轴旋转,转矩传感器必须通过滑环、无线通信或电感耦合与外边世界耦合。
3.3 转速
马达转速通常以每分钟转速(RPM) 来描述,即它在1分钟内沿固定轴旋转的完整圈数。
转速传感器输出可能是一个与转速成正比的模拟电压。更普遍的是,转速传感器输出是一个由马达转轴上圆盘生成的TTL 脉冲。通过测量TTL 信号频率,并应用比例因数,可以确定马达转速。
例如,如果转盘每转一圈生成n 个脉冲,那么每分钟转速(RPM) 可以计算为:

3.4 实现转矩和转速测量与电气测量相结合
为了确定马达和驱动器组合的效率,必须考虑系统的电气输入以及在马达输出端生成的机械功率。马达输出功率是转矩和转速的乘积:
马达输出功率(W)= 转矩(Nm)× 转速( 弧度/ 秒)
= 转矩(Nm)× 转速(RPM)×
注意:1ft-lb=1.3558Nm( 牛顿米)
1HP=745.7W
通过以下公式,可以计算系统效率:

为了进行这些测量,PA4000 包括传感器输入端,用于连接转矩和转速传感器。通过测量驱动器输入端消耗的电力、以及马达输出端的转矩和转速,使用一台仪器就可以测量出系统效率。
4. 驱动器输出测量
脉宽调制驱动器的输出波形非常复杂,由一系列高频分量( 因载波) 和低频分量( 因基波) 组合而成。
对大多数功率分析仪来说,这带来的问题是:如果在高频测量,那么波形中的低频信息将丢失;如果滤除脉宽调制波形在低频测量,那么高频数据将丢失。这个难题的出现是因为在低频对波形进行调制。因此,高频测量( 如总电压有效值、总功率等) 必须在高频处进行,但必须超出输出波形低频分量的整数倍。
泰克PA4000 功率分析仪利用脉宽调制输出测量的特殊工作模式克服了这个难题。它对数据进行高速采样,并实时计算总体数量,包括所有谐波和载波分量。与此同时,对采样数据进行数字化滤波,提供低频测量,如输出频率的基波分量和测量。

除了从同一测量中获得低频和高频结构外,该技术允许高频测量与低频信号同步,这是提供精确和稳定的高频测量结果的唯一方法。[page]

根据测量的输出频率范围,滤波器的选择方案有3 种,参见表2。

滤波器的选择并不影响较高频率分量的测量,因为这些测量是通过未经过滤的数据进行的。不过,为了优化低频测量结果,您应当为应用选择正确的滤波器。
5.使用PA4000 示波器测量驱动器输出
该仪器通过三相三线配置连接至输出。( 又称作两表法。关于两表法的更多信息,请参见应用指南:三相测量原理。) 对于输出电流高达30A 的脉宽调制驱动器,PA4000 可以通过其内部电流分流器,直接与驱动器输出相连,如图4 所示。

对于输出电流超过30 A 的脉宽调制驱动器,您可以使用外部电流传感器或外部电流分流器。泰克公司提供多种固定核心电流传感器,最高电流达1000 A。这些传感器包括电缆,实现与PA4000 的快速连接,并利用仪器的15 V 直流电源。当PA4000 功率分析仪与外部分流器一起使用时,您可以将分流器与外部分流电压输入相连。这些输入可以测量从X V 到Y V 的分流输出。对于电流传感器和外部分流器,重要的是,记住正确设置缩放比例。
特别是对于低电流驱动器, 如果可能, 应当将PA4000 直接与脉宽调制输出端相连。这是因为,尽管交流电流变压器和霍尔效应电流传感器在较高电流时提供良好的精度,但对于几安培的较低电流,其结果精度往往较差。
尽管在脉宽调制驱动器输出端出现极高的共模电压,为了从电流分流器得到优异的结果,PA4000 输入电路已经优化。分流器两端电压可能只有几毫伏,但分流器电势相对于接地端上下波动幅度高达数百伏,每微秒高达数千伏。
虽然采用两表法时,PA4000 只有两个通道用于测量,但该仪器将以矢量方式计算和显示第三条(非测量)线路的电流值。这将为权衡负载提供有价值的检查。此外,由于两表法不需要分析仪的第三个通道,它可以用作独立的测量通道,如测量脉宽调制驱动器内的直流总线,详见第7 部分介绍。
一旦分析仪进行连接和配置完毕,它将利用选定的滤波器测量驱动器输出功率。如果PA4000 测量频率有困难,应确保已经指定正确的滤波器频率范围。
注意,Vrms、Arms 和功率数字是通过预过滤值测得的,因此包括所有的高频分量,其中基波值只考虑对马达有用功的贡献。电压有效值与基波电压存在显著差异是很正常的。通常,在电流和功率之间的差异较小,因为感应马达对电流进行了过滤。
通过SUM 通道读取的总功率和基波功率之间的差异,可以估算高频损耗。这代表脉宽调制驱动器提供的电力,这部分电力对机械输出功率没有贡献,因此增加了马达的热量:
高频损耗= 总功率 - 基波功率
当进行脉宽调制驱动器比较时,这是非常有意义的测量。
6. 驱动器直流总线测量
虽然脉宽调制驱动器输入和输出之间的连接称为直流总线,但这个总线上的电压和电流远非纯直流,因此,在进行所需的测量时必须小心谨慎。
直流总线测量最好在存储电容器输入端进行,如图5所示,因为从本质上讲,这里的电流是来自交流电源的低频电容器充电脉冲,是从逆变器吸收的高频电流脉冲中释放出来的。

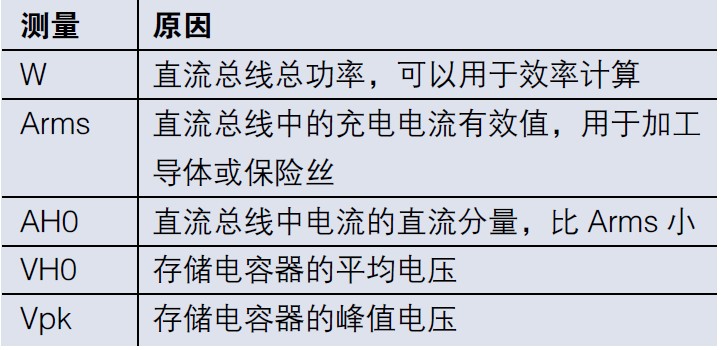
表3. 直流总线关键测量参数
如果独立进行直流总线测量,可以利用分析仪的CH1( 通道1)。不过,直流总线测量往往与驱动器输入或输出的三相二线测量一起进行。在这种情况下,应当使用剩余独立运行通道中某个通道对直流总线进行测量。
例如,将CH1 和CH2 连接,进行输入或输出测量。CH3 与直流总线相连,如图5 所示。使用F[7] 选择脉宽调制马达驱动器输入或输出模式,并启动独立的CH3。[page]
7. 驱动器输入测量
从本质上讲,大多数脉宽调制马达驱动器输入电路是三相二极管整流桥,并包含电容滤波器,如图6 所示。
每个输入相的电流波形由为存储电容器充电的脉冲组成。图7 给出某相的电流波形,它包括电源频率的基波分量以及大量谐波分量。
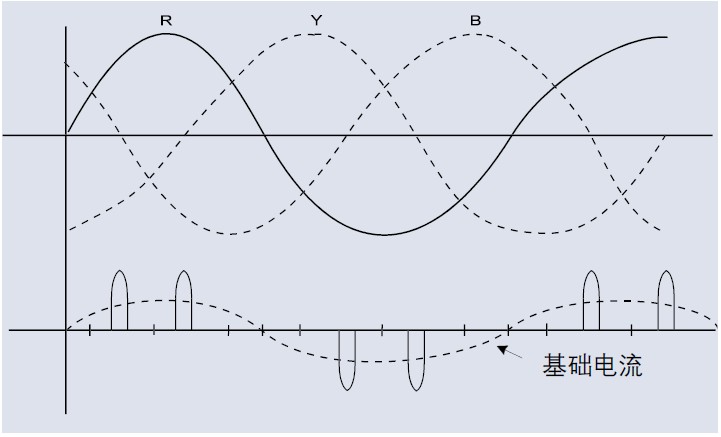
图7. 脉宽调制驱动器输入端电压和电流波形
如果驱动器的逆变器部分为输入电路提供一个恒流负载,那么每相的输入电流将是一个振幅恒定的失真波形,如图7 和图8 所示。
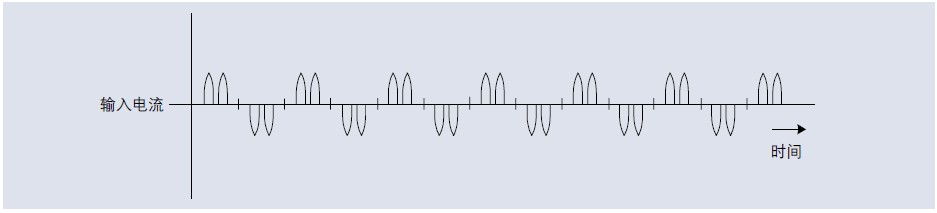
图8. 未经调制的输入电流波形
遗憾的是,脉宽调制驱动器的逆变器部分可能不向输入电路提供恒流负载;在这种情况下,从电容器吸收电流的负载电流将受到输出频率分量的影响。这意味着,来自交流电源的电流在工频频率是复杂的、失真的电流波形,它由驱动器频率进行调制。图9 给出其波形。调制可能严重影响测量,特别是在低驱动速率,不过,利用扩展的测量区间(为驱动器输出波形周期整数倍),可以解决这个问题。
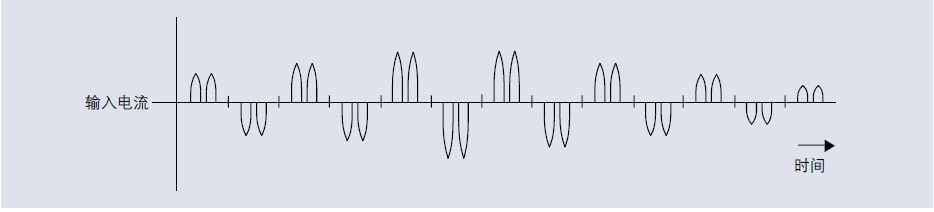
图9. 在输出频率处进行调制的输入电流波形
PA4000 支持脉宽调制驱动器输入功率的精密测量,即使马达处于低频时。输入功率测量与交流工频同步,但通过调节显示屏更新速率及均值设置,可以扩展测量区间。
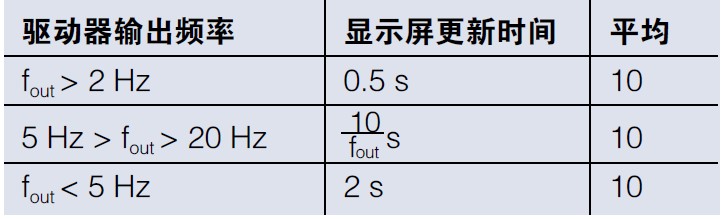
表4. 选择显示屏更新时间和均值,把驱动器输出频率对驱动器输入功率测量的影响降到最小
对于超过20 Hz 的输出频率,PA4000 的默认设置通常将给出稳定结果。默认设置是:
显示屏更新速率:0.5 s
平均:10
当输出频率在5 Hz ~ 20 Hz 之间时,将均值设置为10,以改进稳定度;对显示屏更新时间进行设置,使之包括测得的脉宽调制输出周期(1/f) 的整数倍。根据经验法则,应提供10 个周期。
例如:
输出频率 = 5.5 Hz
显示屏更新速率 = 10/(5.5 Hz)= 1.8 s
对于低于5 Hz 的输出频率,使用最长的显示屏更新速率(2 s),平均为10。
例如,对单相驱动器进行测量时,如果读数太大,可以将均值设置为10 以上,以帮助使测量稳定。
分析仪通过三相三线配置进行连接,如图10 所示( 即所谓的两表法,关于利用n-1 台功率表可以测量通过n 条线路向系统提供电源的证明,请参见应用指南:三相测量原理)。
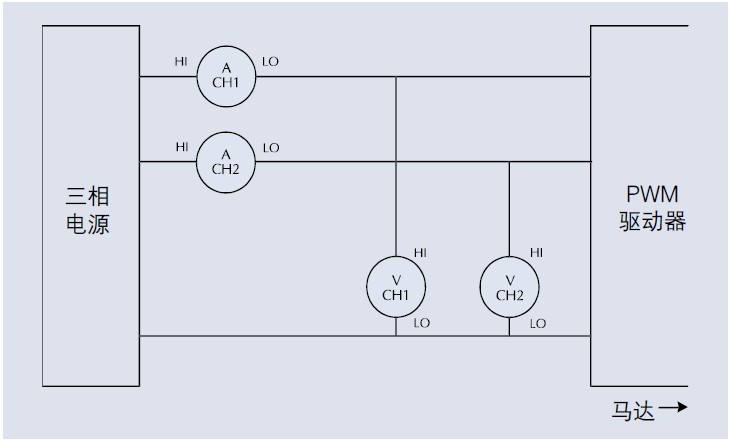
图10. 三相三线连接
在这个线路配置中,可能使用分析仪的第三通道和第四通道,以测量驱动器输出或驱动器内的直流总线。
上一篇:脉宽调制(PWM) 马达驱动器电源的测试分析(下)
下一篇:三相电源测量知识ABC
推荐阅读最新更新时间:2024-03-30 22:59
AVR单片机pwm程序+仿真_数显

#include iom16v.h #define uchar unsigned char #define uint unsigned int uchar Table ={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x79}; uchar Data1 ={10,0,5,0}; uchar Data2 ={3,9,1,0}; uchar Key1,Key2; void DelayMs(uchar i) { uchar j; for(;i!=0;i--) { for(j=150;j!=0;j--); } } v
[单片机]

一种用于汽车电磁阀质量测试电源的设计
电磁阀在现代汽车中应用十分广泛,电磁阀的性能与汽车的性能紧密相关。施加到电磁阀的电源在实际工作时的状态是异常复杂的,主要表现在电磁阀电源的电压幅度、频率、占空比的复杂性和随机性。为了保证电磁阀出厂的质量,本文设计并制作了一种便于模拟汽车电磁阀实际工作状态的电源。根据电磁阀在汽车中的工作要求,对电磁阀在各种工作状态下的质量要求进行模拟测试。同时解决测试出口电磁阀产品性能指标的难题,为我国电磁阀的出口产品提供必要的技术性能测试设备。 1 系统结构与工作原理 如图1所示,整个系统包括单片机、I/O扩展电路、D/A转换电路、PWM产生电路、频率选择电路、光电隔离和驱动电路及键盘和显示电路。系统以单片机为控制中心,采用DDS
[电源管理]
P89LPC932的PWM DA转换
/**************************Asm版**********************************/ /*实验目的: 测试CCU模块的PWM输出功能(控制占空比) 占空比由TOR2H,TOR2L及OCRAH,ORCAL控制 通过控制占空比获得所需电压值 */ $NOMOD51 $INCLUDE(REG932.INC) // PLEEN BIT TCR20.7 ORG 0000H AJMP MAIN ORG 0100H MAIN: MOV P2M1,#0x00 ;设置端口模式 MOV P2M2,#0xFF ;设置P26,OCA
[单片机]
PFC与PWM控制器复合芯片ML4824及其应用研究
摘要:传统的两级APFC采用两套控制电路和至少两个功率开关管,增加了电路复杂程度及成本。随着PFC/PWM两级复合控制芯片的产生,两级APFC的这一缺陷可以得到大大改善。基于对PFC/PWM两级控制复合芯片ML4824功能的简介,对两级APFC技术进行了研究,并通过带PFC的蓄电池充电器的研制,证实了该复合控制的可行性和实用性。关键词:功率因数校正;脉宽调制控制器;双管正激变换器 1引言 20世纪90年代以来,随着各国对用电设备输入电流谐波含量的限制,以及各种限制输入电流谐波的标准的建立,使有源PFC技术取得了长足的进展。有源PFC技术由于变换器工作在高频开关状态,而具有体积小、重量轻、效率较高和功率因数高等优点。从电路结构上
[电源管理]
利用PWM给HCS12单片机应用实现语音功能
HCS12系列单片机未包含数/模转换的模块。要给其扩展语音功能,通常的做法是增加一块数/模转换芯片。虽然这样做可以得到非常好的音质(取决于数/模转换芯片的性能),但由于要多使用一块数/模转换芯片,在对音质要求不太高的应用中,会给设计增加额外的成本,同时也使电路设计相对复杂。 本文介绍利用PWM还原声音的解决方案,可以很好地解决这个矛盾。例如安全报警应用中,系统通常已经包含了一块微控制器(用来处理人机交互以及系统的控制等),当发出警报时,可以是“BB”或“当当”的蜂鸣声;当然,更好的做法是发出清晰的语音。 用PWM产生声音的基本原理,是使用存储在Flash中的音频采样数据或通过某种算法产生的声音数据,来控制PWM每个
[单片机]
MSL2164:16串LED驱动器应用案例精讲
MSL2164和MSL2166器件可在新型3D和2D滚动背光TV中提供极具吸引力的观看和视频游戏体验。 这些LED驱动器可与爱特梅尔tinyAVR®、megaAVR®和AVR XMEGA等AVR®微控制器(MCU) 无缝集成。微控制器处理定时和调光指令,将数据发送给MSL2164和MSL2166器件。 AVR器件与固件提供优化整个背光设计的总体解决方案,提供相比竞争解决方案更卓越的性能。 MSL2164和MSL2166器件具有最高效的功率管理、背光控制,以及用于3D、扫描和区域调光侧光LCD TV的多重调光模式,可以驱动多达16个并联LED串,提供全面的系统和故障管理,以支持高性能背光设计。采用这一新驱动器系列,高端电视O
[电源管理]
pwm 调制程序(c)
*pwm 调制程序*/ /*作者: 尹书扬 */ /*时间:05-8-27 */ /*说明: key用来控制 脉宽的高电平时间, 可以在P2.0引脚 接一个led做测试*/ #i nclude reg51.h #define CIRCLE 10 void pwmkey(void); unsigned char count=1,last; sbit led=P2^0; sbit key=P0^0; void main(void) { EA=1; ET0=1; TH0=(65536-1000)/256; TL0=(65536-1000)%256; TR0=1; count=1; last=1; while(1
[单片机]
基于ARM的空间光通信APT控制系统设计
空间光通信是以光波作为载波,在空间中进行信息无线传输的一种新型通信技术,其具有保密性高,抗干扰性强,通信速率高等优点,将会在卫星与卫星、卫星与地面控制站的无线通信领域发挥重要的作用,具有广阔的应用前景。但是由于光波波束窄,空间环境又比较复杂,而给通信链路的建立造成了极大的困难,所以对于空间光通信,必须先使用一套捕获、瞄准与跟踪(Acquisition,Pointing and Tracking,APT)系统来建立和维持光通信链路。嵌入式系统具有高性能、低功耗、低成本的优点,使其在运动控制上的应用具有很大优势,以ARM嵌入式处理器为基础的控制系统现在已经得到了广泛应用。针对目前卫星通信终端必须具有高实时性、高集成度、低功耗、体积
[嵌入式]
 功率变换器和电气传动的预测控制
功率变换器和电气传动的预测控制 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号