O 引言
在电缆生产线上,通常需要检测电缆的走线速度,用来控制收线电机的转速和计算线缆的长度。成缆工艺参数的稳定,直接关系到电线电缆的质量。
该项目是为某电缆厂的技术改造项目,要改造的设备是利用束线原理制造的盘绞式成缆机,改造的内容是更换全部电气控制系统。这种成缆机的放线盘固定,而收线盘固定在盘绞架上同时完成绞合和收线的双重运动。工作时,在线缆盘直流电机的带动下,完成电缆的收线运动,在排线电机的带动下实现电缆在收线盘的整齐排列。在大盘电机的带动下,通过齿轮箱带动盘绞架实现轴向旋转,完成电缆绞合运动,是保证节距的关键。线速度是由收线盘的旋转速度决定的,如果收线电机的转速恒定,收线盘随着收线轴的变粗,线速度会增大,因此,为保证收线速度恒定,要逐渐降低收线电机的转速。
1 系统设计原理
根据电缆的生产工艺要求,不同型号的电缆,其走线速度是恒定的。通常,电缆的运行速度是由电缆带动旋转编码器来检测的。电缆线速度测速示意图如图1所示。
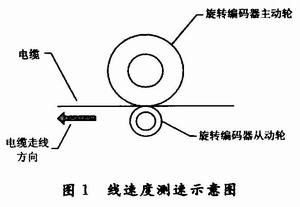
该项目中,采用的旋转编码器的型号是TRDJ1000系列,旋转一周输出1 000个脉冲。因此,根据在一定时间内检测到的脉冲数,就可以计算出电缆的走线速度。实际应用中,将其与一加工精度极高、周长为500 mm的旋转编码器测量主动轮与旋转编码器同轴安装,主动轮与电缆接触。在电缆生产运动过程中,依靠摩擦力拉动测量轮旋转,这样就把电缆的直线位移(长度)转化为旋转编码器的脉冲数字信号输出。
设旋转编码器每旋转一周,其计数脉冲个数为NP(脉冲个数/转),则旋转编码器角分辨率(单位:(°)/个)为:
P=360/NP
假定固定在旋转编码器转轴上的主动导向轮半径为r m,则旋转编码器位移分辨率(单位:m/个)为:
Ps=27πr/NP
这时,若计数脉冲个数为N(个),则由旋转编码器测量的位移量S(单位:m)为:
S=Ps·N
线缆走线速度V(单位:m/s)为:
V=S/T
式中:T为接收N个脉冲所用的时间(单位:s)。
2 硬件电路设计原理
该检测电路以AT89C51单片机为控制核心,如图2所示,旋转编码器输出的脉冲,经过电平转换,变成O~5 V的TTL电平脉冲,送到AT89 C51单片机的外部中断INT0端。每收到一个脉冲,单片机中断一次,同时计数脉冲存储器加1,与标准脉冲值比较后,单片机的P0口输出给定值数字量,再经过D/A转换变成给定值模拟量,送给收线电机调速器,控制电机转速。这里的D/A转换芯片采用8位数据输入,四路模拟量输出的TLC7226IDW。如果需要提高电机转速控制精度,可以选用其他10位、12位数据输入的D/A转换芯片。
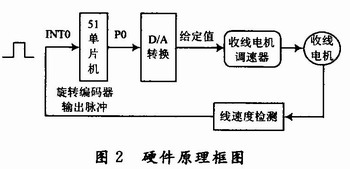
工作时,当收线电机带动电缆运动时,带动旋转编码器的主动轮旋转,从而旋转编码器旋转,输出脉冲。该脉冲送入光电耦合器,进行隔离、整形、电平转换,送给AT89C51的12脚,外部中断INTO进行脉冲计数。每接收到一个脉冲,单片机执行外部中断INT0子程序一次,脉冲计数存储器加1。例如,每间隔1 s读取一次,从而可以根据计数脉冲的个数,与标准脉冲数比较,因此,可以判断当前线速度的大小。
线速度的计算方法如下:
例如,要求线速度V为0.1 m/s。
旋转编码器每秒输出脉冲数=V·Np/C
其中:C为旋转编码器主动轮周长(单位:m)。所以,线速度为O.1 m/s时,旋转编码器每秒输出标准脉冲数=0.1×1000/0.5=200个/s。
3 软件设计
在定时器中断中运行,在计时子程序中,每秒执行一次。即查询每秒收到的脉冲数是否与标准脉冲相同。该线速度控制子程序如图3所示。
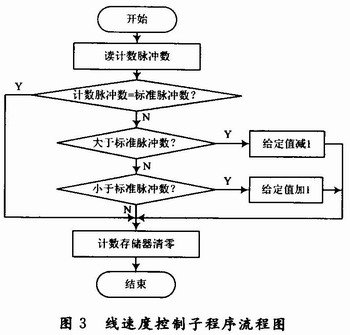
首先,读脉冲计数存储器的数值,与标准脉冲数比较,等于标准脉冲,脉冲计数存储器数值清零,说明此时走线速度等于标准速度;若大于标准脉冲数,说明线速度大于标准线速度,因此,必须使调速器给定值减1,使得收线电机转速减低;若小于标准脉冲数,说明线速度小于标准线速度,必须使调速器给定值加1,使得收线电机转速增加,从而形成闭环线速度控制反馈系统,控制收线电机旋转速度,使得线速度保持恒定。
4 结语
根据电缆成缆机的工艺要求,设计了单片机与旋转编码器组成的闭环线速度控制系统,并给出了主要控制程序的设计方法。还可以通过软件实现线缆走线长度的检测以及运行时间的计算等功能,并通过显示屏显示出来。上述线速度控制系统已成功应用在实际的技术改造中,为企业节约了近百万元的技术改造资金。结果表明,该系统具有运行稳定可靠、电路简单、测量精度较高、成本低等特点,完全满足电缆生产工艺要求,其简洁的电路设计和典型的控制方法具有较高的参考价值。
关键字:旋转编码器 在线速度检测
引用地址:旋转编码器在线速度检测控制中的应用
在电缆生产线上,通常需要检测电缆的走线速度,用来控制收线电机的转速和计算线缆的长度。成缆工艺参数的稳定,直接关系到电线电缆的质量。
该项目是为某电缆厂的技术改造项目,要改造的设备是利用束线原理制造的盘绞式成缆机,改造的内容是更换全部电气控制系统。这种成缆机的放线盘固定,而收线盘固定在盘绞架上同时完成绞合和收线的双重运动。工作时,在线缆盘直流电机的带动下,完成电缆的收线运动,在排线电机的带动下实现电缆在收线盘的整齐排列。在大盘电机的带动下,通过齿轮箱带动盘绞架实现轴向旋转,完成电缆绞合运动,是保证节距的关键。线速度是由收线盘的旋转速度决定的,如果收线电机的转速恒定,收线盘随着收线轴的变粗,线速度会增大,因此,为保证收线速度恒定,要逐渐降低收线电机的转速。
1 系统设计原理
根据电缆的生产工艺要求,不同型号的电缆,其走线速度是恒定的。通常,电缆的运行速度是由电缆带动旋转编码器来检测的。电缆线速度测速示意图如图1所示。

该项目中,采用的旋转编码器的型号是TRDJ1000系列,旋转一周输出1 000个脉冲。因此,根据在一定时间内检测到的脉冲数,就可以计算出电缆的走线速度。实际应用中,将其与一加工精度极高、周长为500 mm的旋转编码器测量主动轮与旋转编码器同轴安装,主动轮与电缆接触。在电缆生产运动过程中,依靠摩擦力拉动测量轮旋转,这样就把电缆的直线位移(长度)转化为旋转编码器的脉冲数字信号输出。
设旋转编码器每旋转一周,其计数脉冲个数为NP(脉冲个数/转),则旋转编码器角分辨率(单位:(°)/个)为:
P=360/NP
假定固定在旋转编码器转轴上的主动导向轮半径为r m,则旋转编码器位移分辨率(单位:m/个)为:
Ps=27πr/NP
这时,若计数脉冲个数为N(个),则由旋转编码器测量的位移量S(单位:m)为:
S=Ps·N
线缆走线速度V(单位:m/s)为:
V=S/T
式中:T为接收N个脉冲所用的时间(单位:s)。
2 硬件电路设计原理
该检测电路以AT89C51单片机为控制核心,如图2所示,旋转编码器输出的脉冲,经过电平转换,变成O~5 V的TTL电平脉冲,送到AT89 C51单片机的外部中断INT0端。每收到一个脉冲,单片机中断一次,同时计数脉冲存储器加1,与标准脉冲值比较后,单片机的P0口输出给定值数字量,再经过D/A转换变成给定值模拟量,送给收线电机调速器,控制电机转速。这里的D/A转换芯片采用8位数据输入,四路模拟量输出的TLC7226IDW。如果需要提高电机转速控制精度,可以选用其他10位、12位数据输入的D/A转换芯片。

工作时,当收线电机带动电缆运动时,带动旋转编码器的主动轮旋转,从而旋转编码器旋转,输出脉冲。该脉冲送入光电耦合器,进行隔离、整形、电平转换,送给AT89C51的12脚,外部中断INTO进行脉冲计数。每接收到一个脉冲,单片机执行外部中断INT0子程序一次,脉冲计数存储器加1。例如,每间隔1 s读取一次,从而可以根据计数脉冲的个数,与标准脉冲数比较,因此,可以判断当前线速度的大小。
线速度的计算方法如下:
例如,要求线速度V为0.1 m/s。
旋转编码器每秒输出脉冲数=V·Np/C
其中:C为旋转编码器主动轮周长(单位:m)。所以,线速度为O.1 m/s时,旋转编码器每秒输出标准脉冲数=0.1×1000/0.5=200个/s。
3 软件设计
在定时器中断中运行,在计时子程序中,每秒执行一次。即查询每秒收到的脉冲数是否与标准脉冲相同。该线速度控制子程序如图3所示。

首先,读脉冲计数存储器的数值,与标准脉冲数比较,等于标准脉冲,脉冲计数存储器数值清零,说明此时走线速度等于标准速度;若大于标准脉冲数,说明线速度大于标准线速度,因此,必须使调速器给定值减1,使得收线电机转速减低;若小于标准脉冲数,说明线速度小于标准线速度,必须使调速器给定值加1,使得收线电机转速增加,从而形成闭环线速度控制反馈系统,控制收线电机旋转速度,使得线速度保持恒定。
4 结语
根据电缆成缆机的工艺要求,设计了单片机与旋转编码器组成的闭环线速度控制系统,并给出了主要控制程序的设计方法。还可以通过软件实现线缆走线长度的检测以及运行时间的计算等功能,并通过显示屏显示出来。上述线速度控制系统已成功应用在实际的技术改造中,为企业节约了近百万元的技术改造资金。结果表明,该系统具有运行稳定可靠、电路简单、测量精度较高、成本低等特点,完全满足电缆生产工艺要求,其简洁的电路设计和典型的控制方法具有较高的参考价值。
上一篇:板级电路内建自测试建模技术研究
下一篇:新手必看!PWM开关电源测量经验总结
推荐阅读最新更新时间:2024-03-30 23:22
基于ARM的旋转编码器采集模块设计

0 引言 随着工业生产自动化水平的提高,各种传感器的应用也越来越多。旋转编码器作为速度和位移反馈的传感器,主要应用于数控机床、高精度的闭环调速系统、伺服电动机、异步电动机、步进电动机、电梯曳引机、电梯门机乃至机械轴等需要对运动速度和位移信息反馈的自动化控制场合,以保证机械的高精度稳定运转,进而提高生产效率和保障安全运营。 本文针对旋转编码器在工业现场中的应用,基于LPCI768硬件平台,设计出一种旋转编码器采集模块,该模块内部具有高精度分析、整形、解码电路,可同时对2路编码器输入信号进行分析、解码。经过处理的旋转信号通过高性能处理器进行采集及数字滤波。旋转编码器同时还对2路编码器信号进行角速度计算,最终模块通过CAN总
[单片机]

 深度学习核心技术与实践 (猿辅导研究团队)
深度学习核心技术与实践 (猿辅导研究团队) 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练
小广播
热门活动
换一批
更多

最新测试测量文章
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月23日历史上的今天
厂商技术中心
随便看看
- 把PB5.0的补丁安装后出现的问题
- 已结束 Microchip 直播【如何在云服务连接中保护您的IP】
- 急求一个采用STC89C52,L293D,TCRT5000,LM339的循迹避障小车Protel图
- 有学电子的吗?加群 45777681
- 锡膏的选择(SMT贴片)
- 51单片机SPI控制四轴插补源程序和其它资料
- CC4021------8位移位寄存器
- 今天上午10:30直播【Microchip安全解决方案|预配置Wi-Fi MCU加快产品上市,简化生...
- EEWORLD大学堂----直播回放: Microchip 利用安全元件进行配件身份验证
- 晒WEBENCH设计的过程+MPXM2053GS压力传感器电路设计




 京公网安备 11010802033920号
京公网安备 11010802033920号